Como modelar uma garra paralela de dois dedos
Você pode modelar uma garra paralela no RoboDK usando a ferramenta Modelar Mecanismo ou Robô. As garras paralelas também são chamadas de garras de dois dedos e permitem que um robô agarre peças.
Siga estas etapas para configurar seu modelo 3D no RoboDK:
1.Importe seu modelo 3D: Arraste e solte seu arquivo STEP para carregá-lo em sua estação (arquivos IGES ou STL também funcionam).
2.Abra o construtor de mecanismos: Utilitários ➔ Modelar mecanismo ou Robô.
3.Selecione Garra de 2 dedos em "Tipo de robô".
4.Você pode renomear seu mecanismo como "Garra".
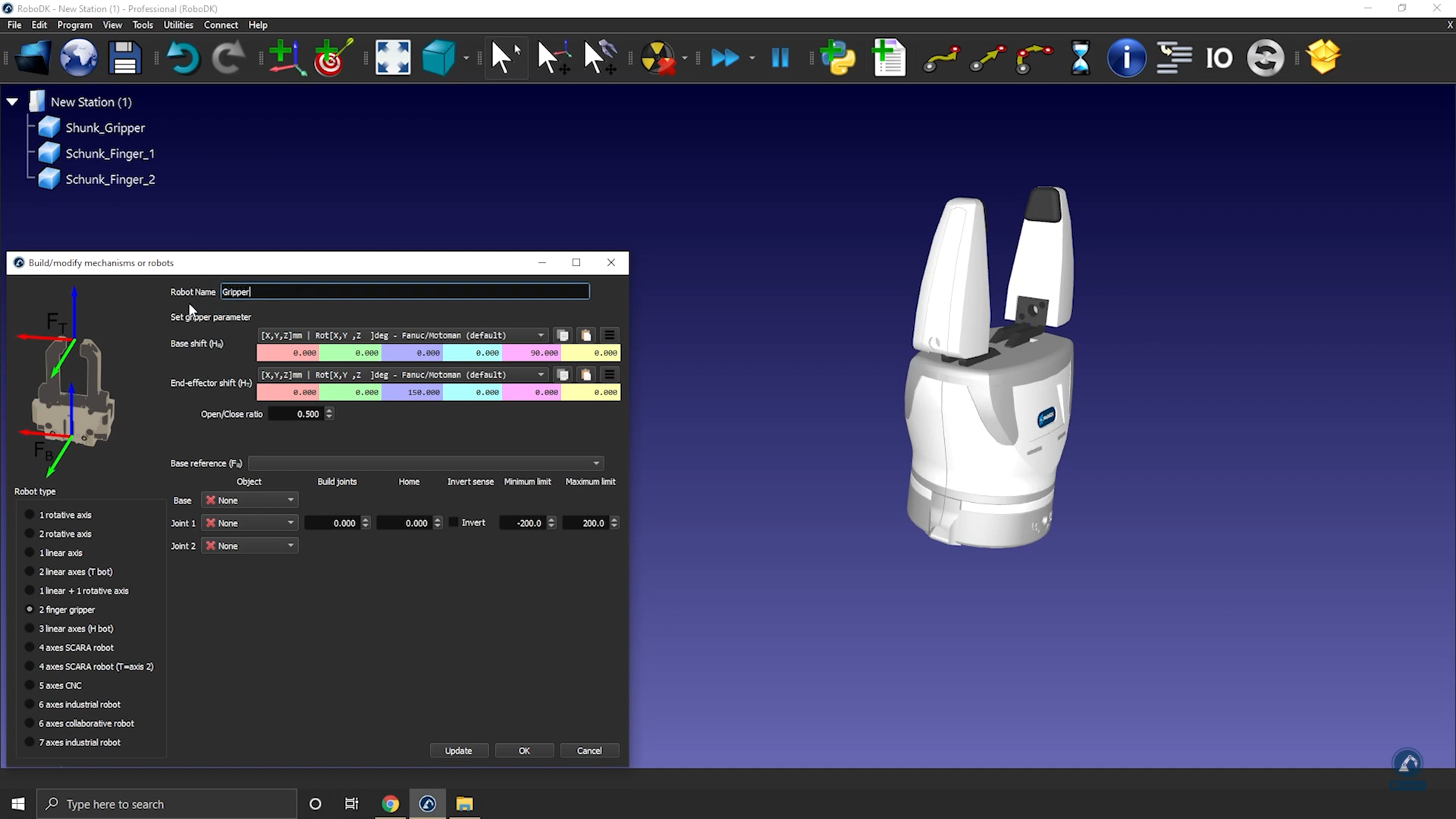
Siga estas etapas para posicionar sua estrutura de base:
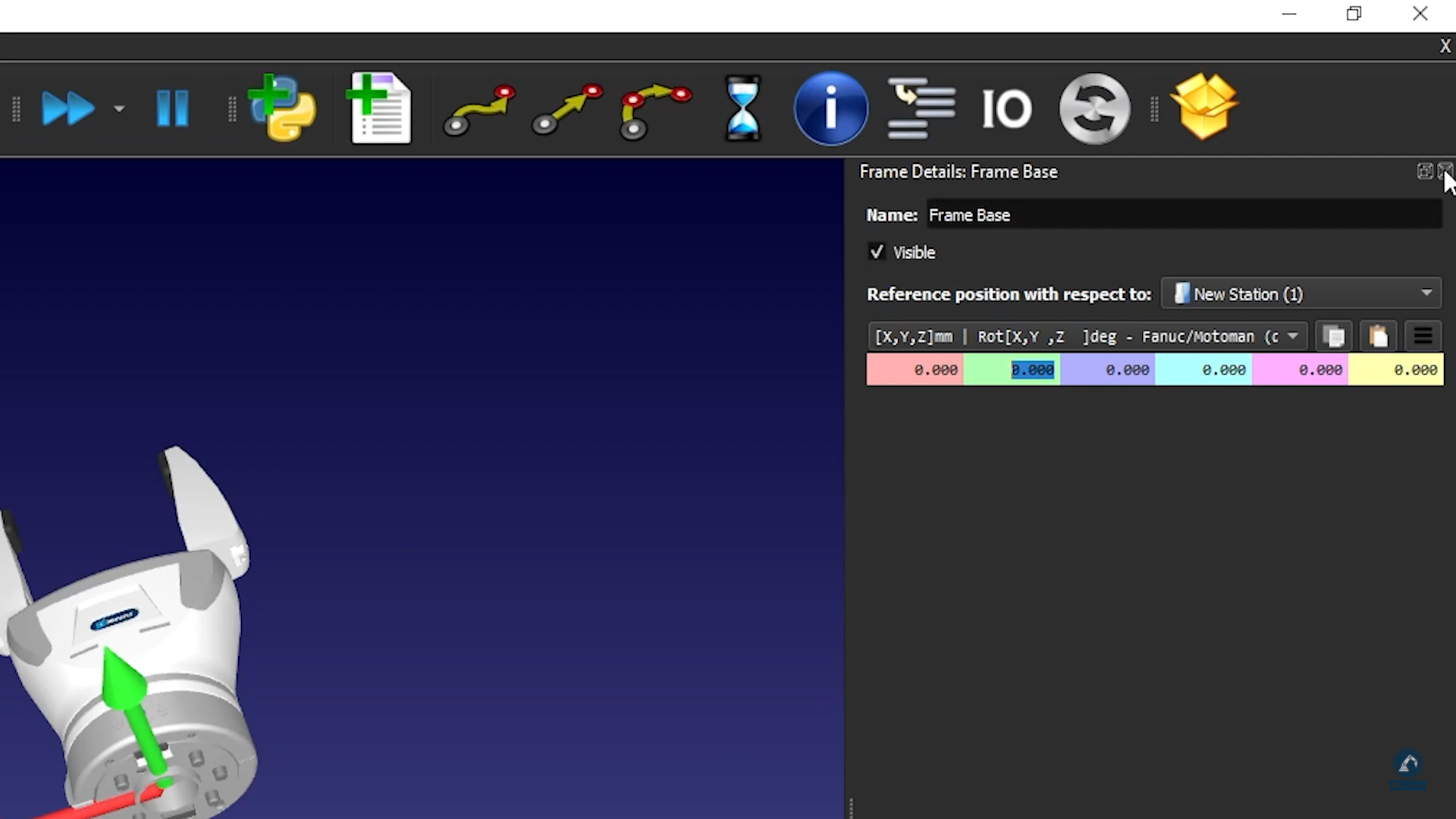
5.Crie um frame de referência (ele deve estar abaixo da garra) e renomeie-o como Frame Base.
6.Certifique-se de que o quadro que você acabou de criar esteja posicionado de acordo com a imagem: Traga o frame de referência para 0,000 mm (X,Y,Z).
7.Digite a amplitude de movimento da garra: Se Você colocar os dedos na posição 0, o limite mínimo será 0 e o limite máximo será 80.
8.Selecione Atualizar.
9.Verifique se ele se move na direção correta e se os limites estão corretos usando o Mover eixos.
10.Se estiver satisfeito com os resultados, você pode pressionar Ok