Como modelar um robô cartesiano de três eixos
O vídeo a seguir mostra como modelar um robô cartesiano de 3 eixos (H-bot). Os braços do robô podem ser montados em eixos externos para ampliar seu alcance.
Siga estas etapas para configurar seu modelo 3D no RoboDK:
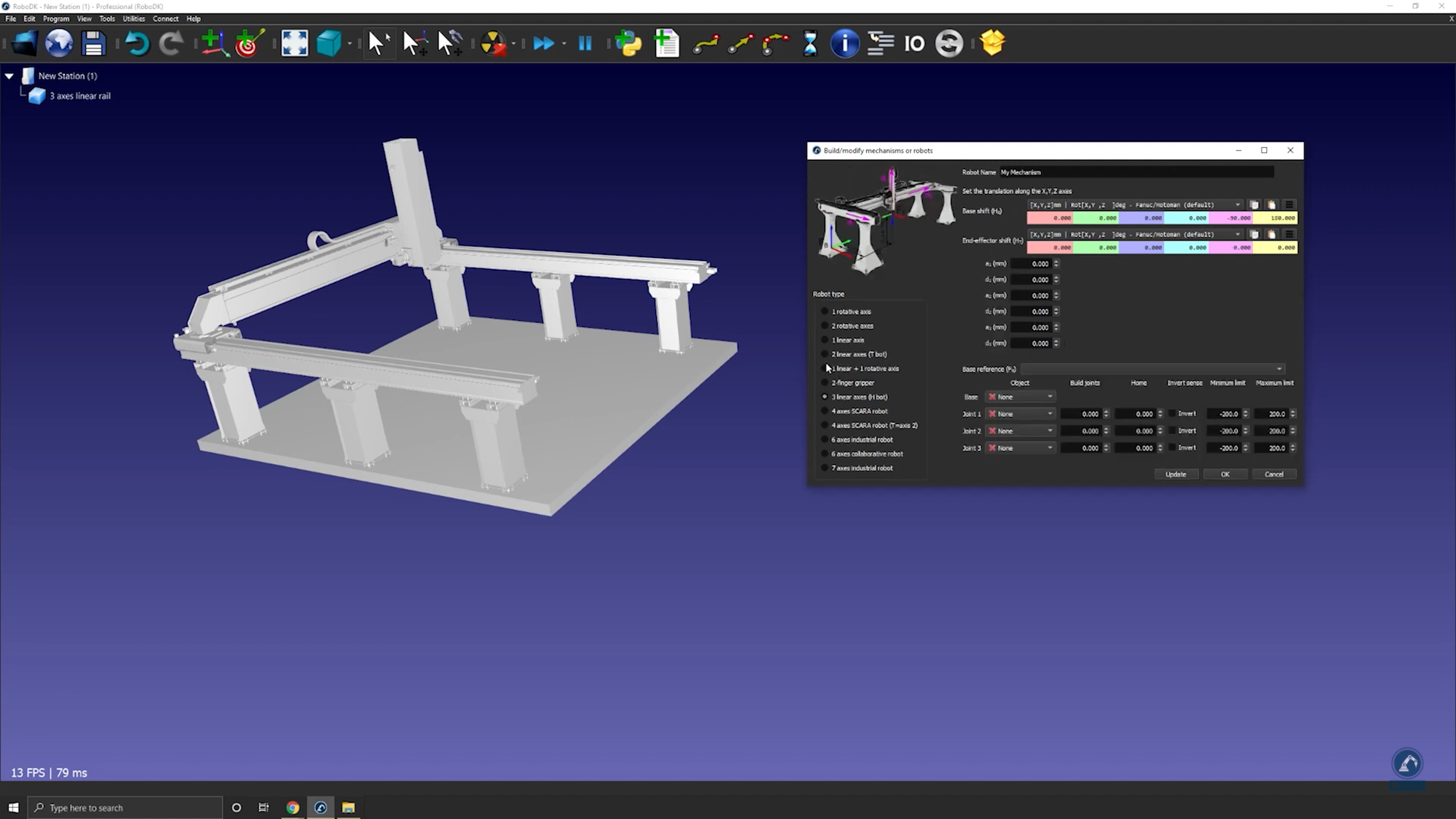
1.Arraste e solte o modelo 3D (como um arquivo STEP ou IGES) no RoboDK para carregá-lo em sua estação.
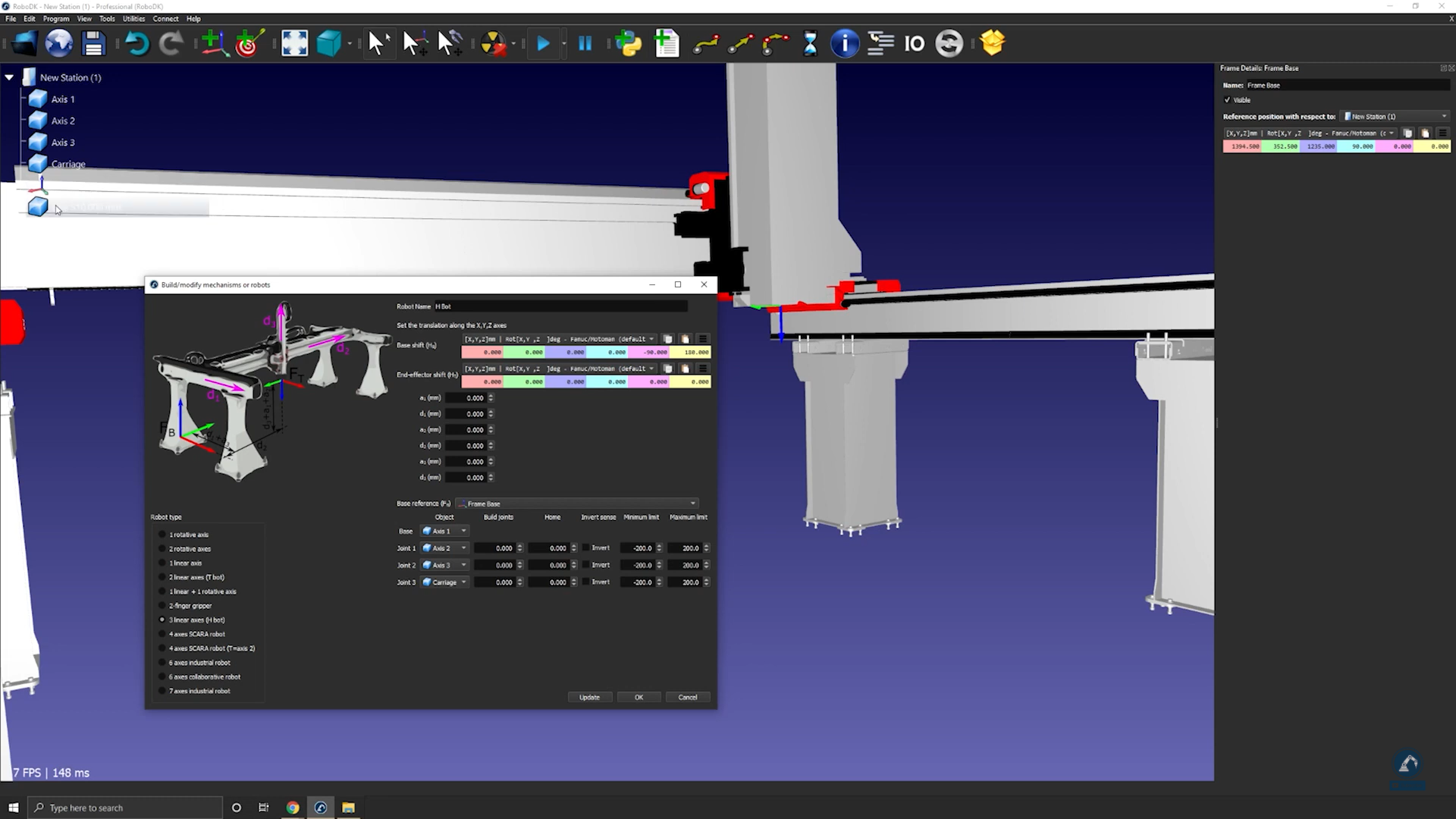
2.Abra o construtor de mecanismos: selecione Utilitários➔ Modelar mecanismo ou Robô
3.Em Tipo de robô, selecione 3 Eixos lineares(H-bot).
Siga estas etapas para criar seu Base Frame:
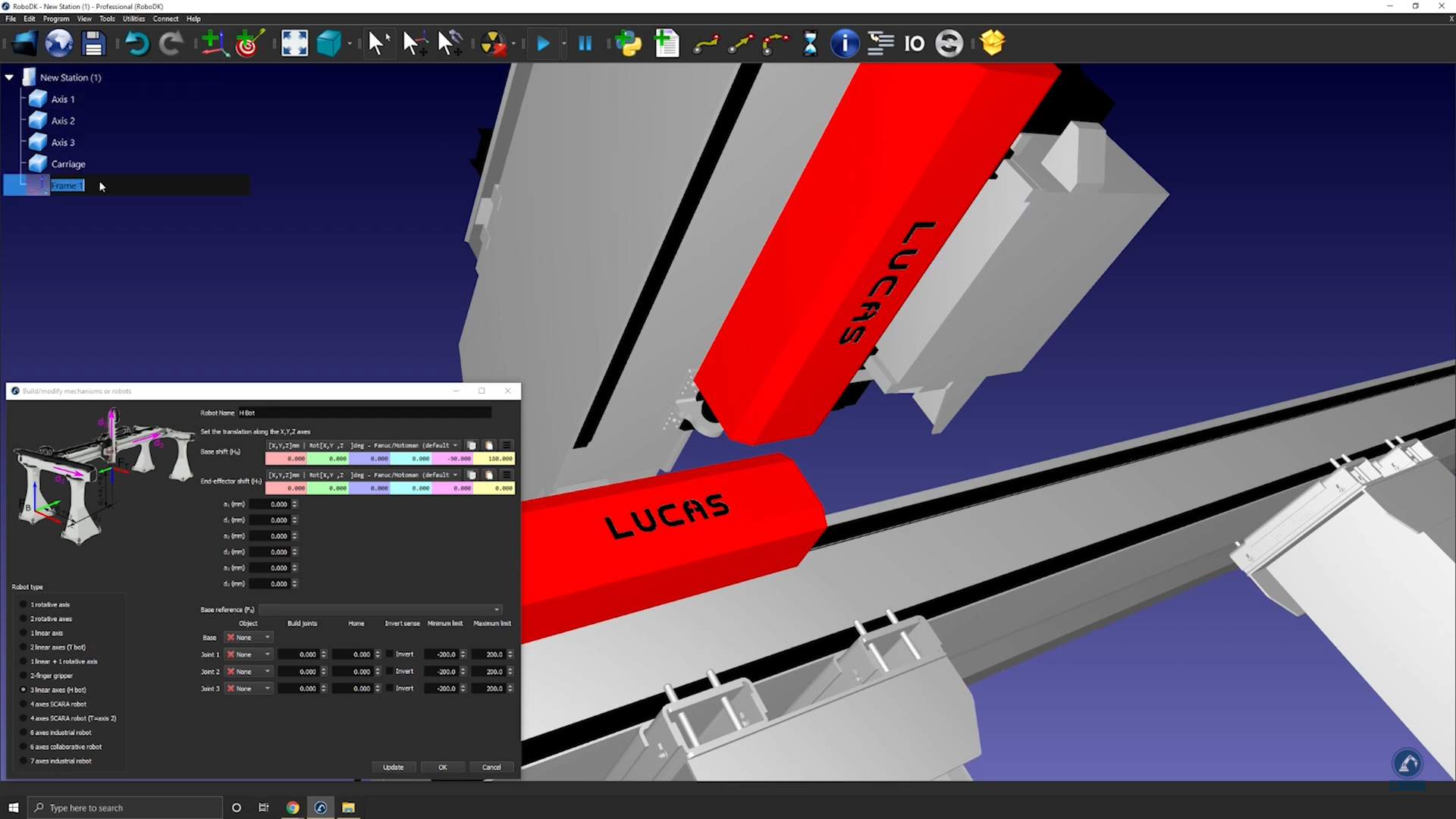
4.Quando o objeto estiver dividido em diferentes partes, abra novamente o construtor de trilhos (selecione Utilitários➔ Modelar Mecanismo ou Robô➔ 3 Eixos lineares).
5.Renomeie seu robô em Nome do robô.
6.Crie um frame de referência na posição 0 do trilho. Você pode renomeá-lo como Frame Base.
Siga estas etapas para modificar a posição da moldura:
7.Abra o painel de quadros clicando duas vezes em "Frame Base".
8.Abra a ferramenta de medição: Ferramentas ➔ Medição.
9.Selecione o ícone destacado abaixo na ferramenta de medição e, em seguida, selecione as duas bordas do objeto para encontrar a distância entre os dois pontos centrais.
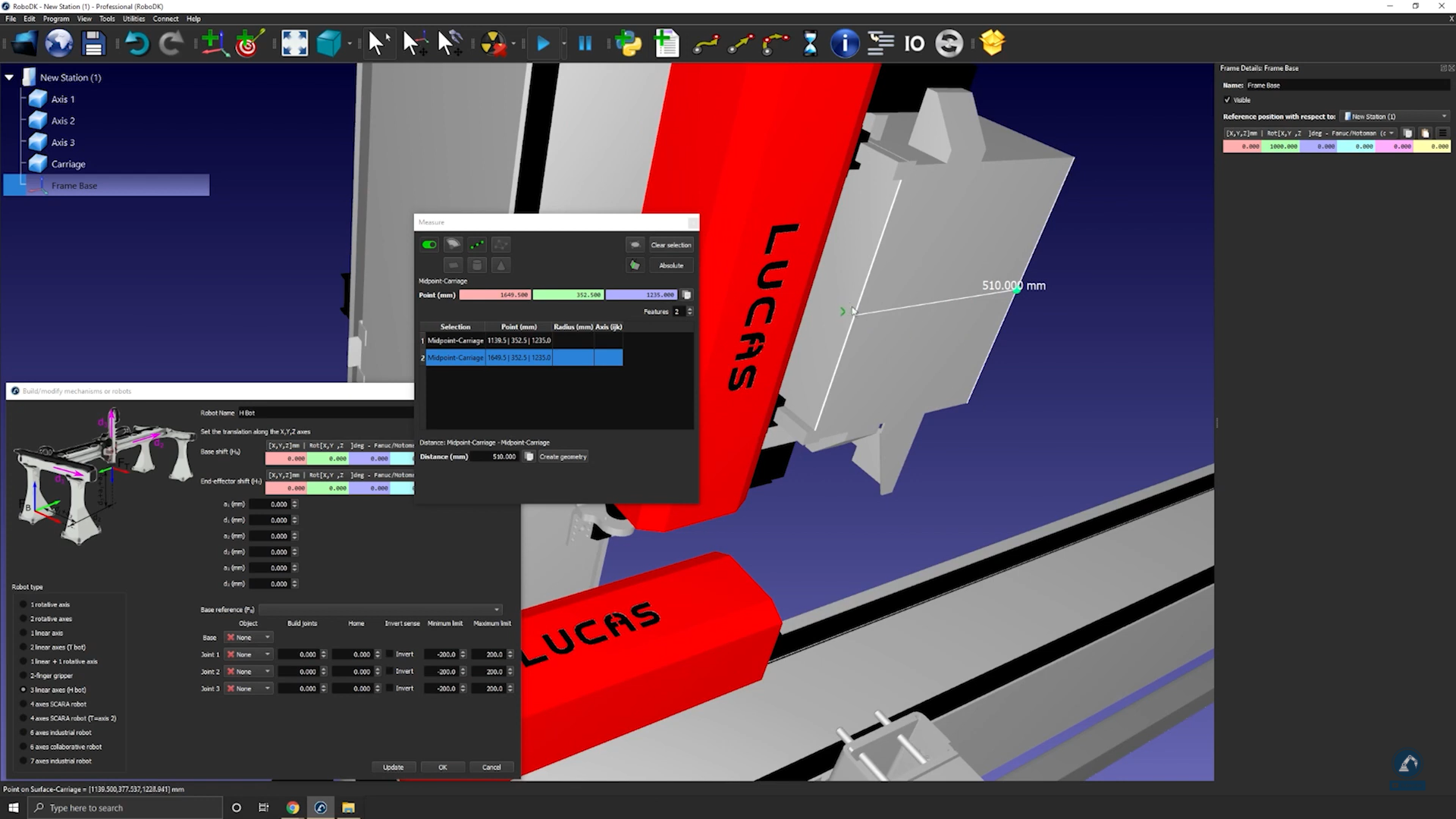
10.Selecione Criar geometria para criar uma linha entre os dois pontos centrais.
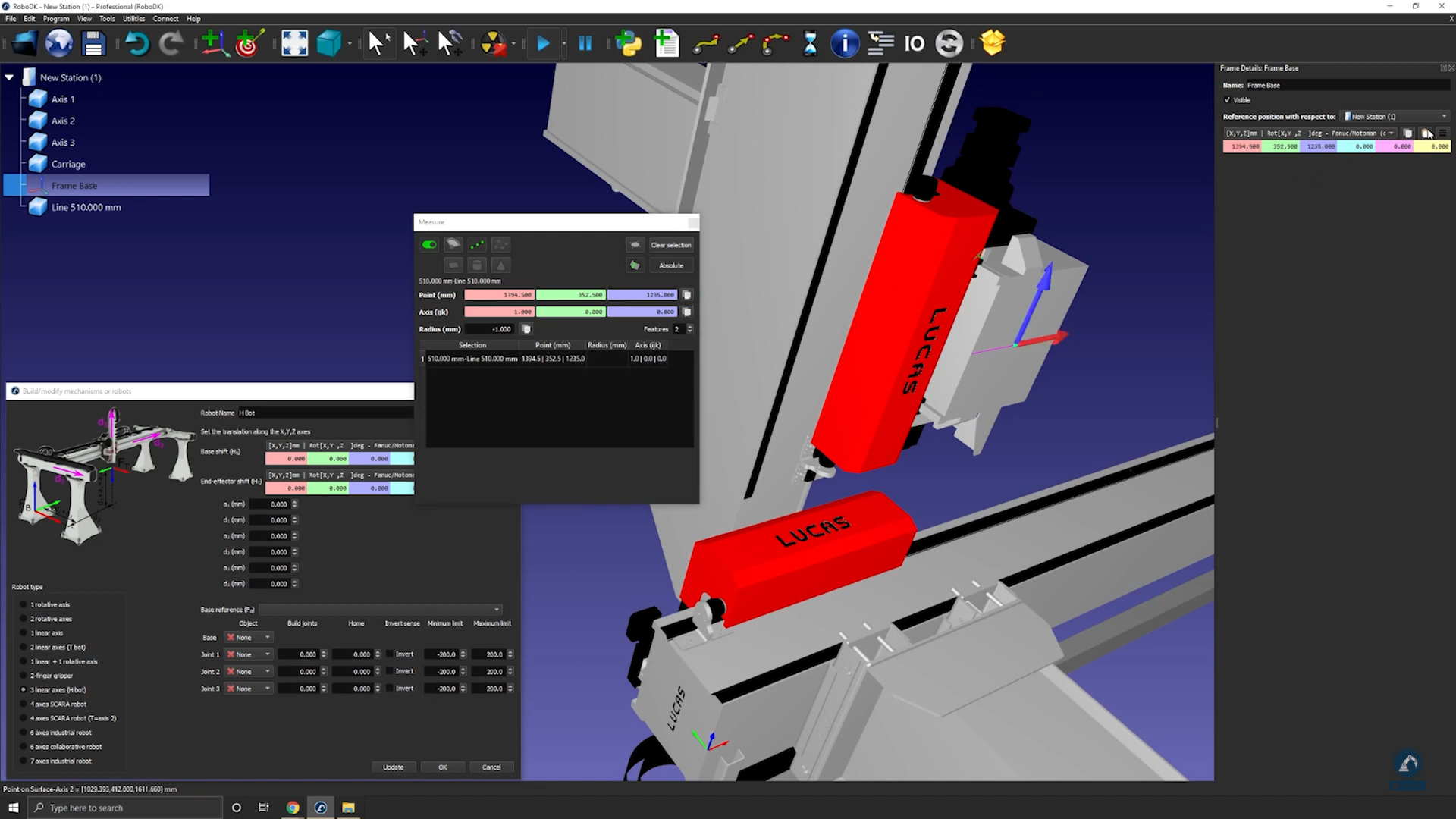
11.Agora que a linha entre os dois pontos foi criada, você pode selecionar Limpar Seleção.
12.Selecione o centro da linha para encontrar a medida do ponto central da linha recém-criada.
13.Copie os valores e cole-os como a posição do quadro (conforme mostrado na imagem abaixo) para garantir que a posição do quadro corresponda à imagem de referência.
Siga estas etapas para garantir que as orientações sejam as mesmas:
14.Gire 90 graus no sentido anti-horário.
15.Selecione Frame Base e, em seguida, selecione os modelos 3D dos trilhos (selecione cada seção, uma a uma), conforme mostrado na imagem abaixo.
16.Digite o comprimento de cada trilho na seção de medidas.
17.Mova cado eixo em Mover eixos para garantir que cado eixo esteja se movendo bem.
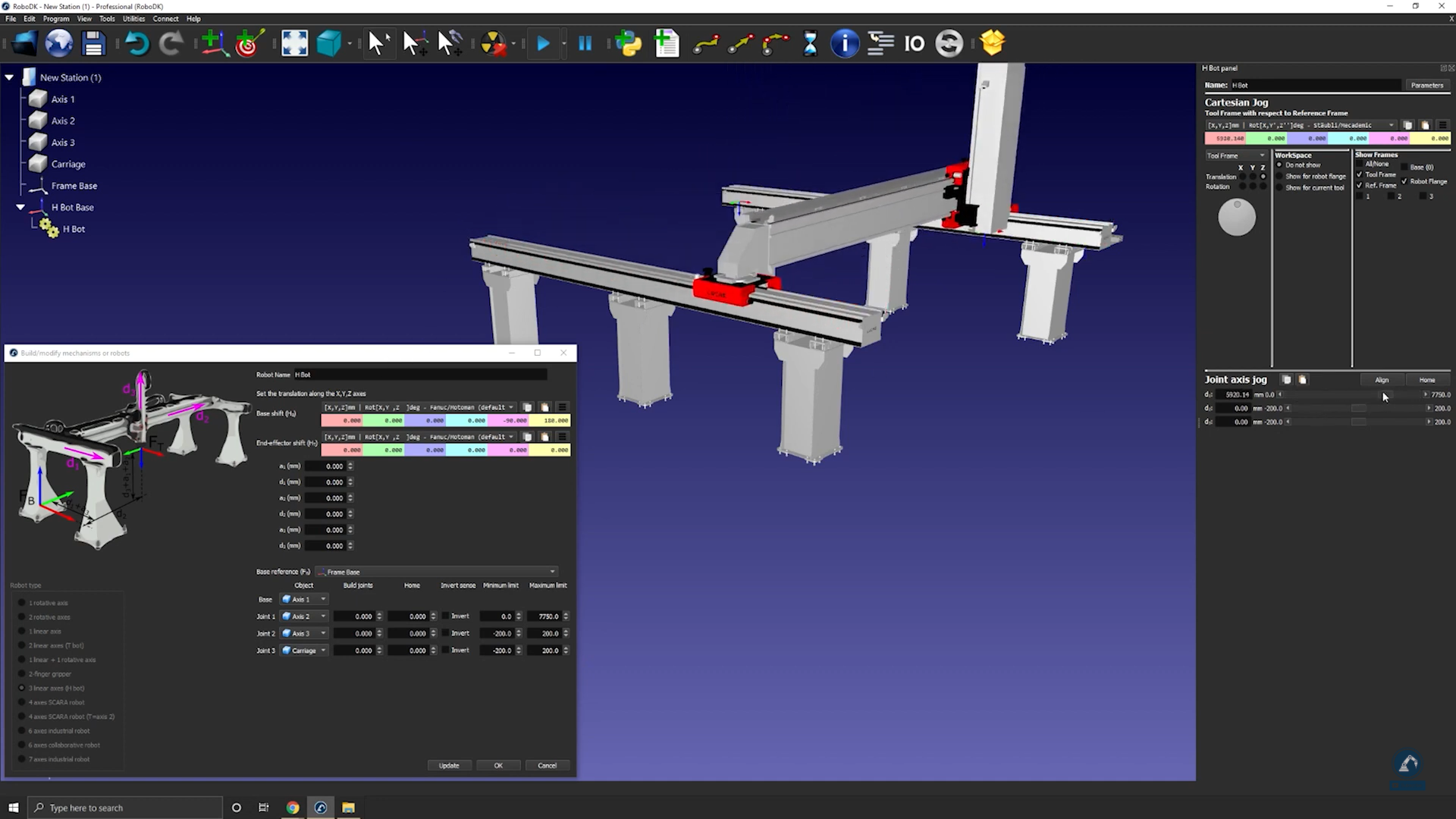
18.Pressione Atualizar depois de testar cado eixo para criar o robô.
19.Se estiver satisfeito com os resultados, você pode pressionar Ok na janela do mecanismo do modelo.