Como modelar um trilho linear de dois eixos
Este exemplo mostra como modelar um trilho linear de 2 eixos, também conhecido como eixos lineares ou pista linear. Os eixos lineares são usados para ampliar o alcance dos braços do robô.
Siga estas etapas para configurar seu modelo 3D no RoboDK:
1.Importe seu modelo 3D para o RoboDK➔ e arraste e solte o arquivo STEP em sua estação.
2.Abra o Construtor de mecanismos: Utilitários➔ Modelar mecanismo ou Robô.
3.Em Tipo de robô, selecione 2 Eixos lineares (T-bot)
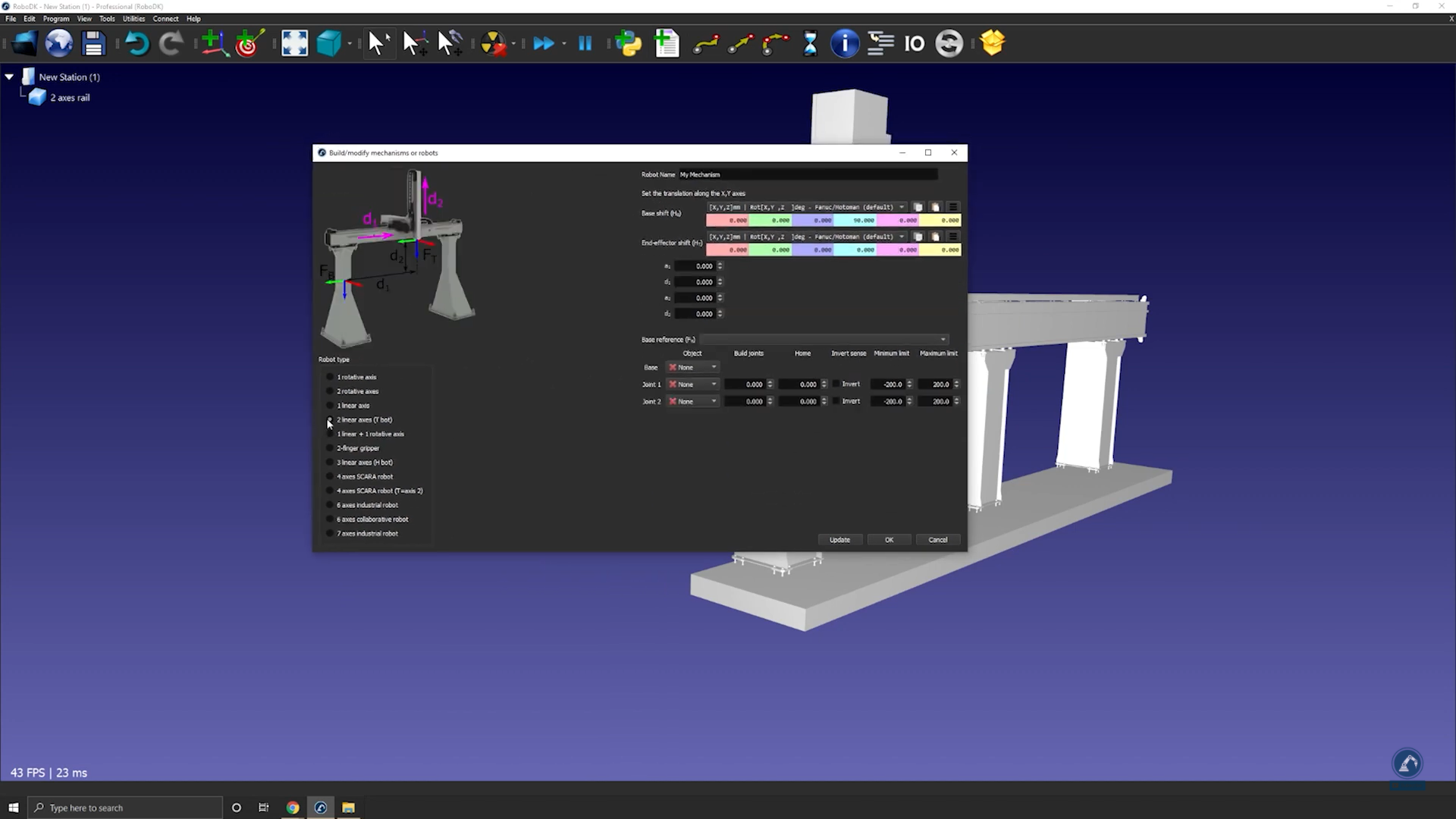
4.Quando o modelo estiver dividido em três partes, abra novamente o construtor de trilhos: Selecione Utilitários ➔ Modelar mecanismo ou Robô.
5.Selecione a opção: 2 eixos lineares (T-bot).
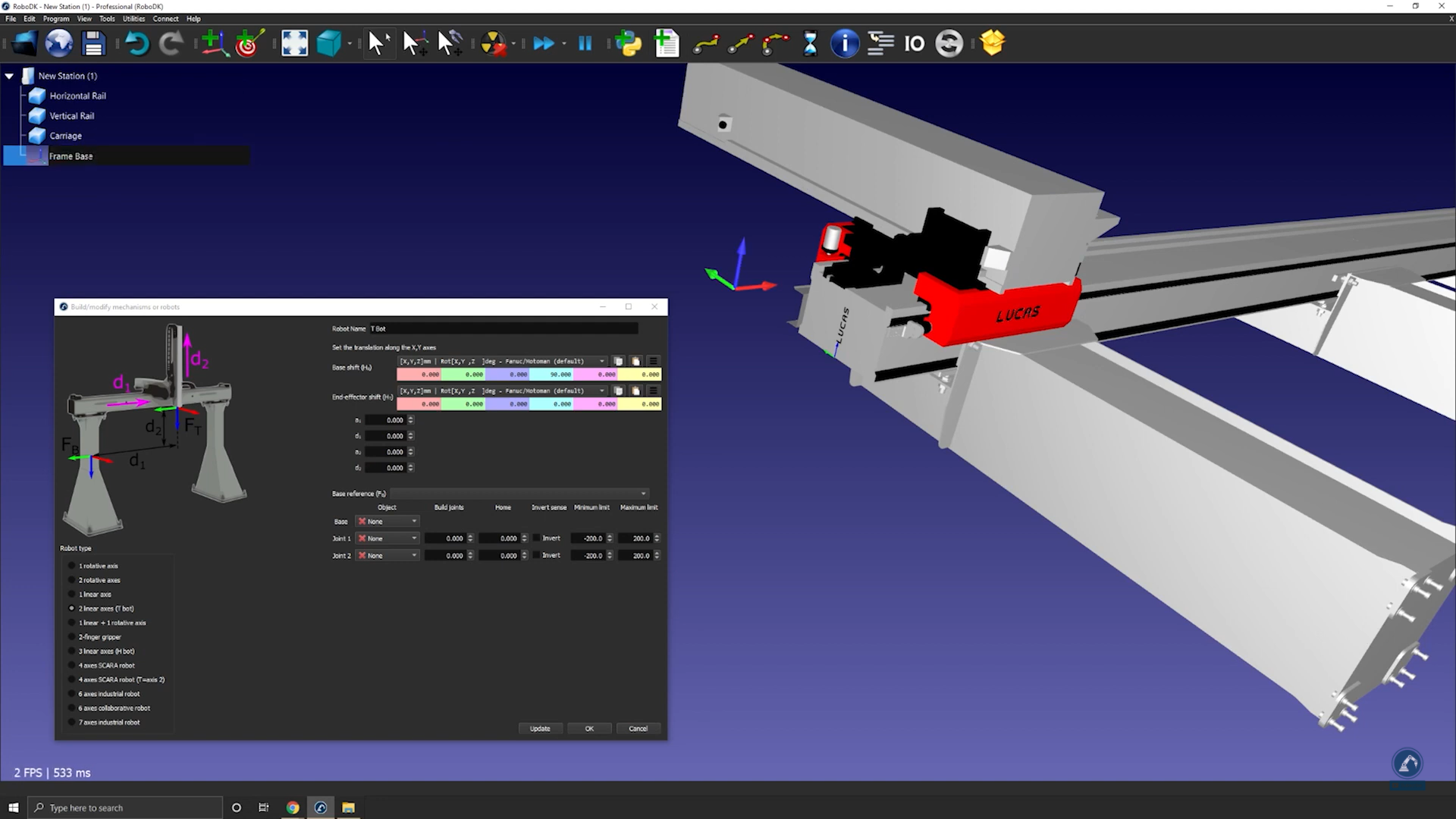
6.Renomeie seu robô para T-bot (em nome do robô).
Siga estas etapas para encontrar a localização de sua estrutura de base:
7.Se você considerar que o frame de base deve estar na posição 0 do trilho, crie o frame de referência exatamente nessa posição e renomeie-o para Frame Base.
Siga estas etapas para modificar a posição da moldura:
8.Abra o painel de molduras clicando duas vezes na moldura.
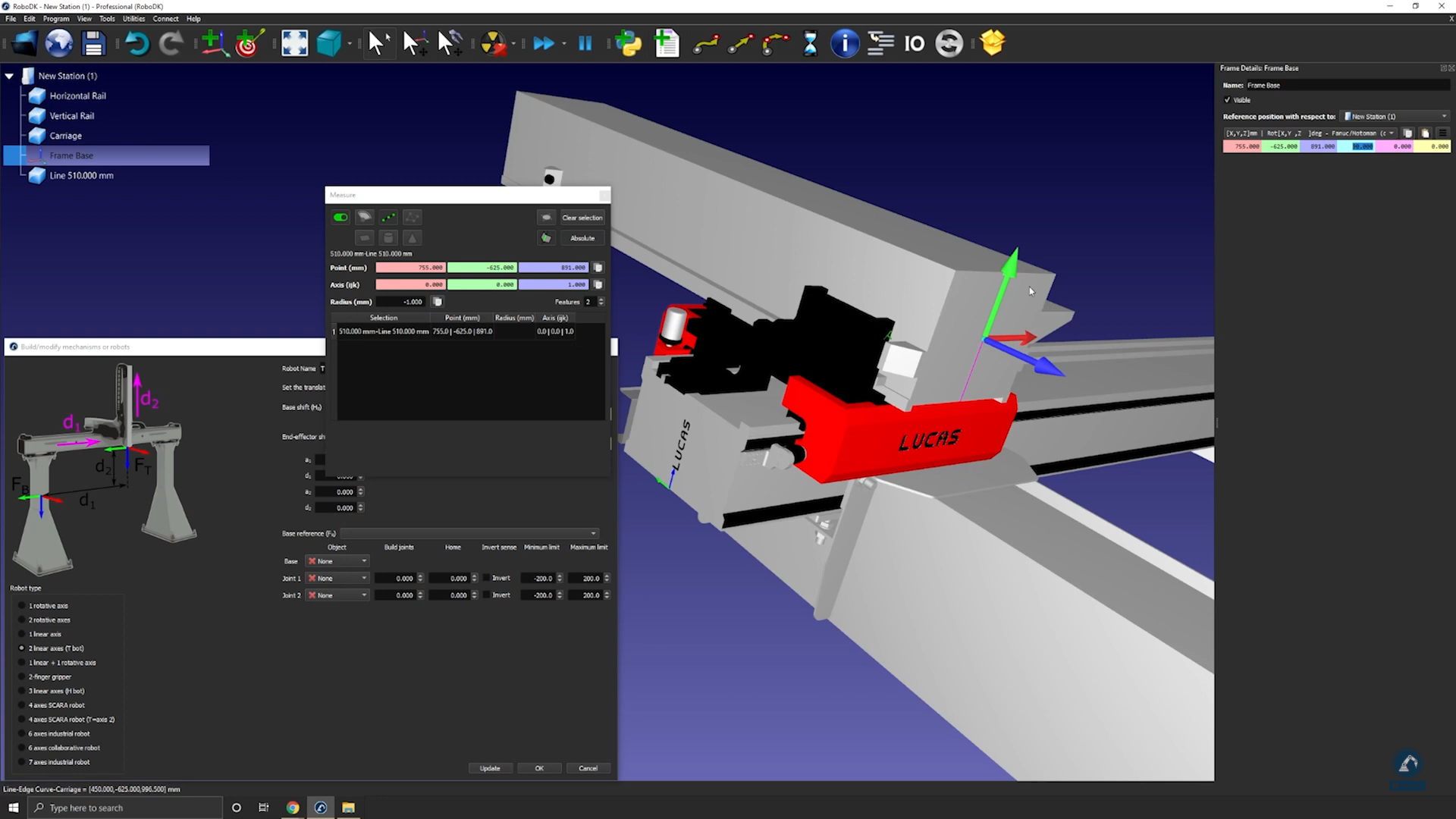
9.Meça a posição do centro da superfície abrindo sua ferramenta de medição: Ferramentas➔ Medir
10.Selecione o ponto central de cada borda (conforme mostrado abaixo) para encontrar a distância entre as duas linhas.
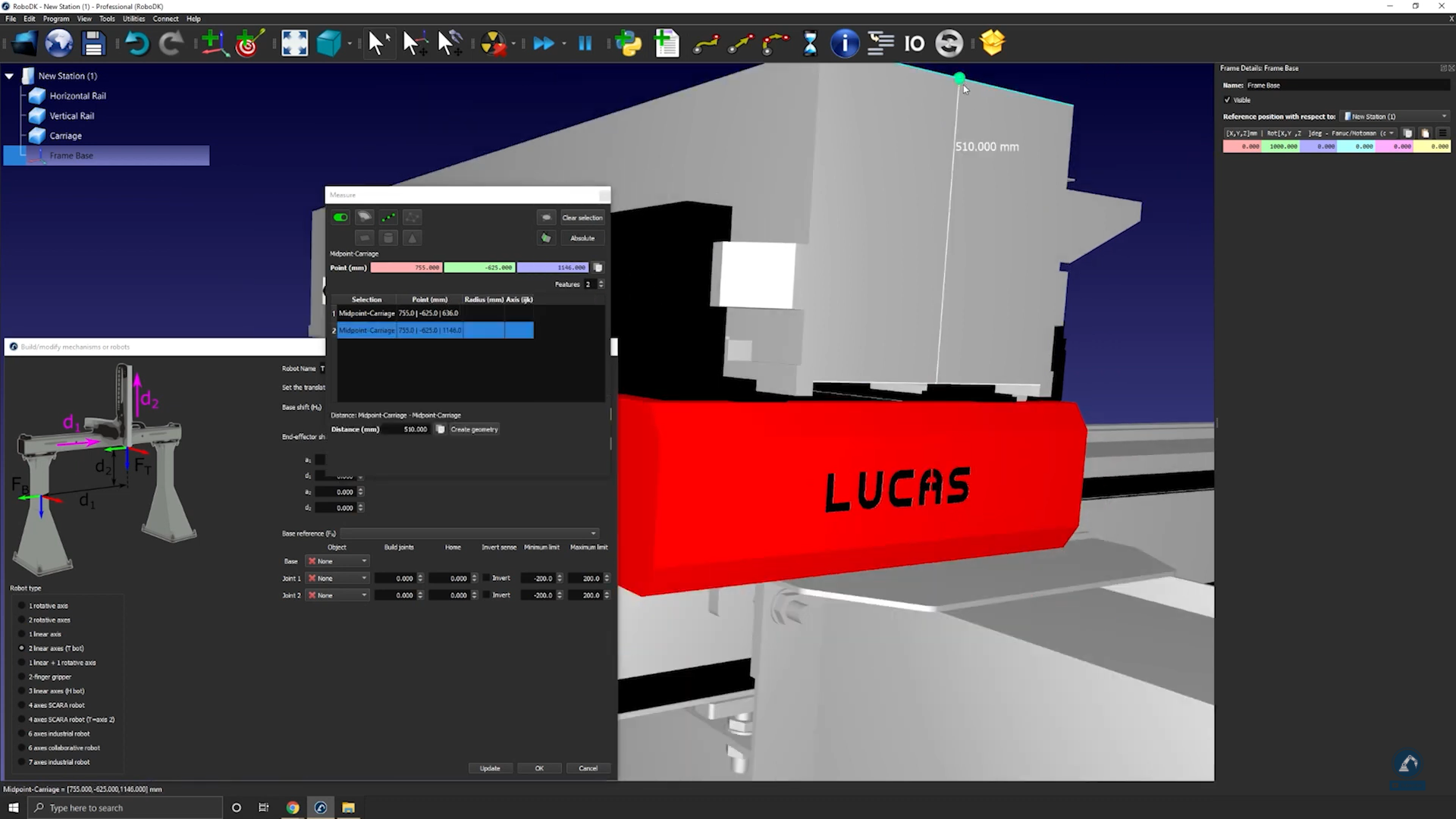
11.Selecione Criar geometria na janela Medição, que criará uma linha entre os dois pontos.
12.Selecione Limpar seleção.
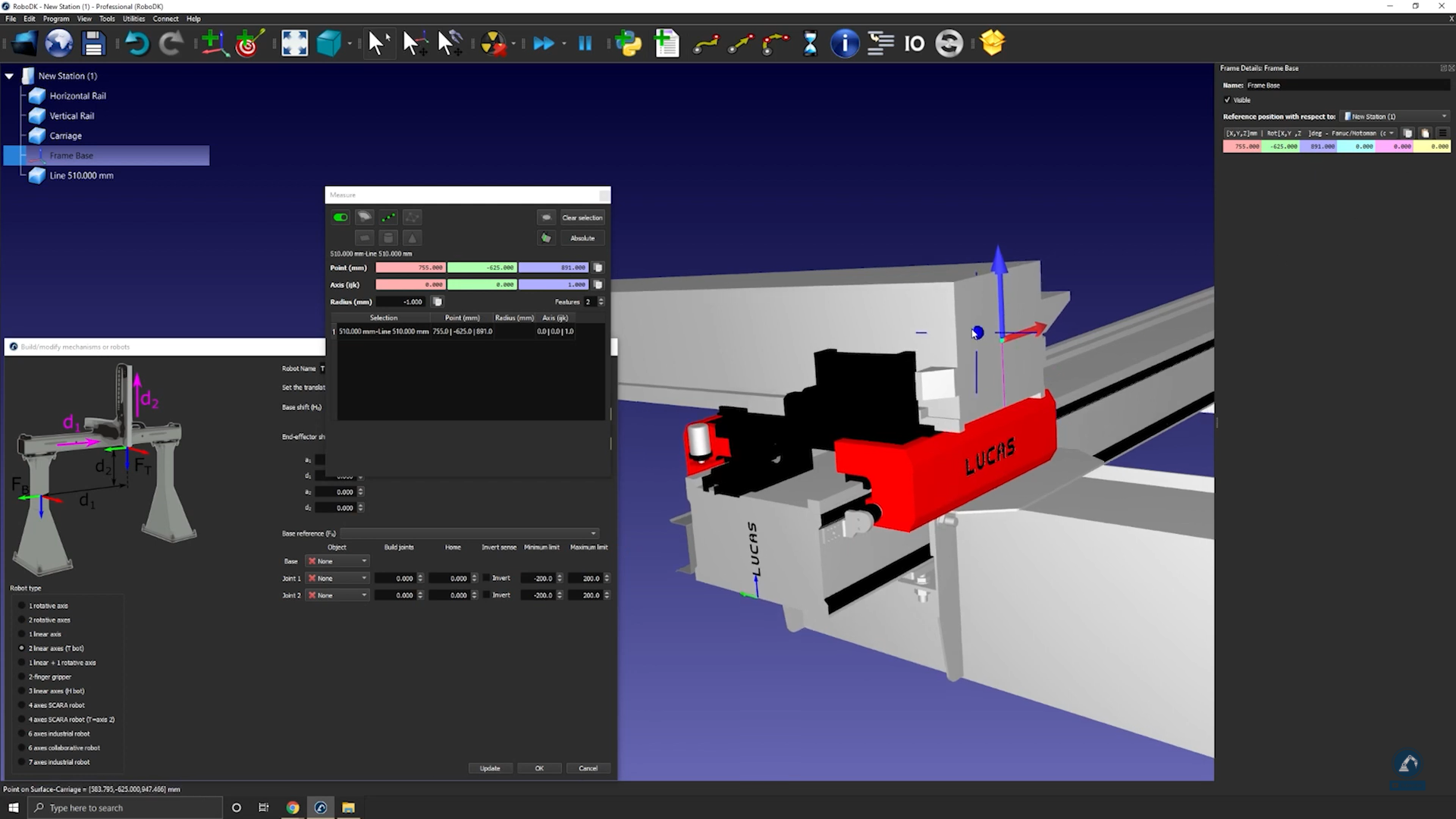
Siga estas etapas para medir a posição do ponto central entre as duas linhas:
13. Selecione o ponto central da linha.
14.Copie os valores na janela Medição e cole os valores como a posição do quadro (conforme mostrado abaixo).
Siga estas etapas para garantir que as orientações sejam as mesmas:
15.Gire 90 graus no sentido anti-horário em torno de X e, em seguida, gire 90 graus em torno do eixo Z (conforme mostrado abaixo).
16.Digite as medidas do trilho na janela Modelar mecanismo ou Robô (Modelo de mecanismo ou robô), conforme mostrado abaixo.
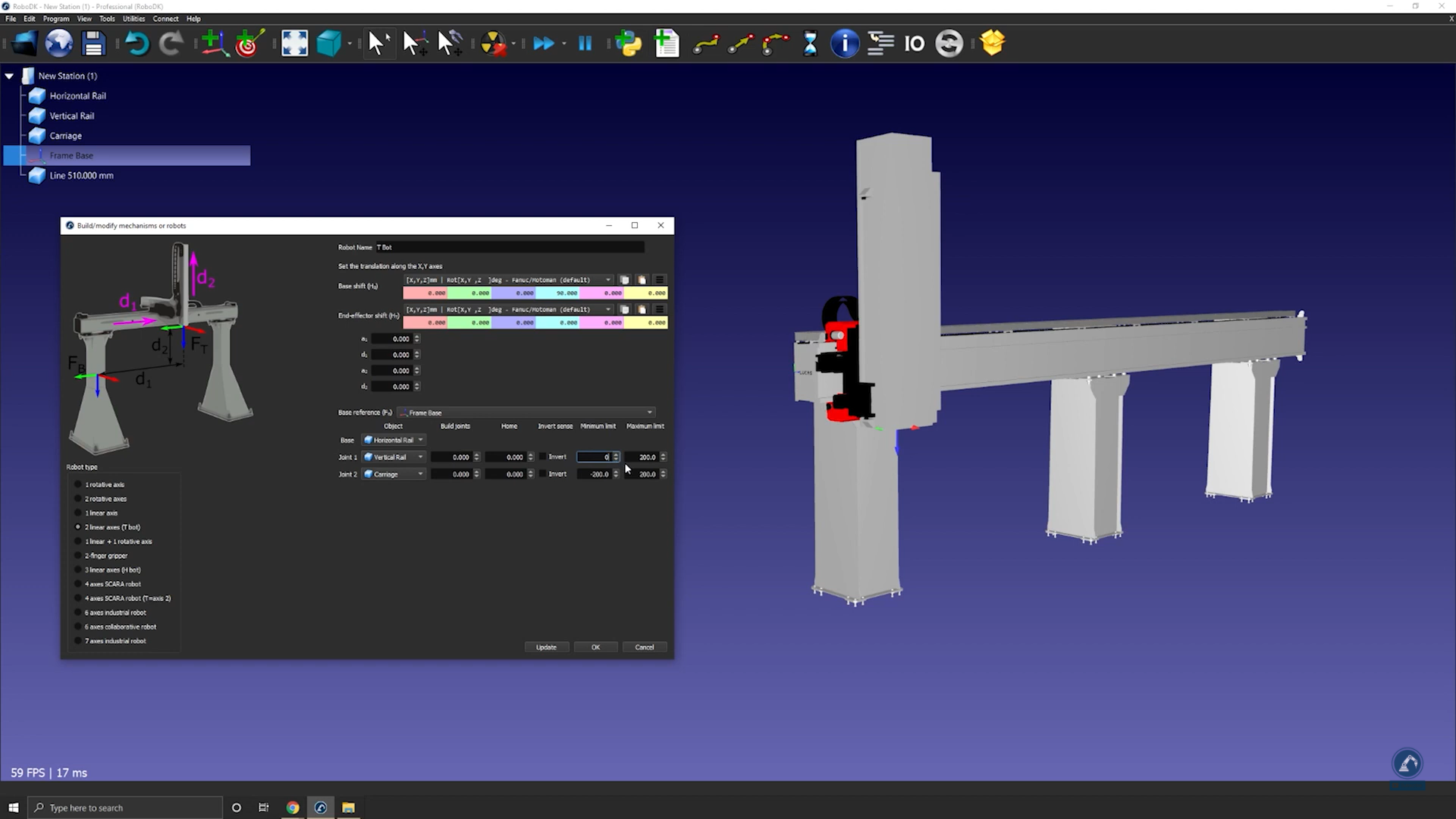
17.Selecione Atualizar para criar o robô.
18.Se Você estiver satisfeito com os resultados, selecione Ok na janela "Modelar mecanismo ou Robô".