Crie um mecanismo ou um robô
Você pode modelar novos mecanismos com o RoboDK, o que inclui plataformas giratórias, mecanismos de um a três eixos lineares, diferentes tipos de braços de robô, robôs Scara, AGVs, CNCs e garras.
Siga estas etapas para criar um novo robô ou mecanismo:
1.Selecione Utilitários➔ Modelar Mecanismo ou Robô.
2.Selecione o tipo de mecanismo ou robô que você deseja criar.
3.Selecione o sistema de coordenadas que representa a origem de seu mecanismo.
4.Selecione um objeto para cado eixo (parte móvel do mecanismo ou robô).
5.Insira os parâmetros do robô conforme descrito na imagem correspondente.
6.Selecione Atualizar para ver o novo mecanismo.
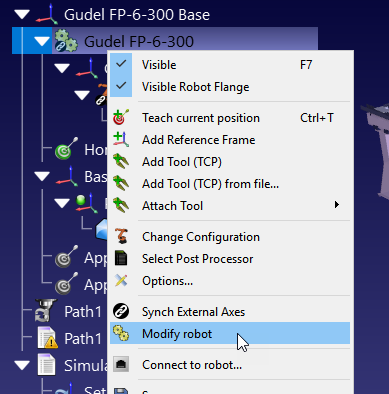
Você também pode modificar os mecanismos existentes clicando com o botão direito do mouse no item do robô na árvore e selecionando Modificar robô. Essa opção está disponível para robôs e mecanismos que você mesmo criou.
Você pode criar os seguintes tipos de mecanismos e robôs no RoboDK:
●Um eixo rotativo (uma mesa giratória ou uma pinça)
●Dois eixos rotativos (por exemplo: um posicionador de 2 eixos)
●Um eixo linear (como um trilho linear)
●Dois eixos lineares (como um T-bot)
●Três eixos lineares (como um H-bot)
●Um eixo linear + um eixo rotativo
●Garras de dois dedos
●Robôs Scara (4 eixos)
●Braços robóticos de seis eixos
●Braços robóticos de sete eixos
Como modelar uma plataforma giratória de um eixo
Esta seção mostra como é possível modelar uma mesa giratória de um eixo. As mesas giratórias são frequentemente usadas em aplicações de usinagem de robôs.
Siga estas etapas para criar uma plataforma giratória:
1.Carregue os modelos 3D da plataforma giratória: arraste e solte os modelos 3D na janela do RoboDK (como arquivos STL, STEP ou IGES).
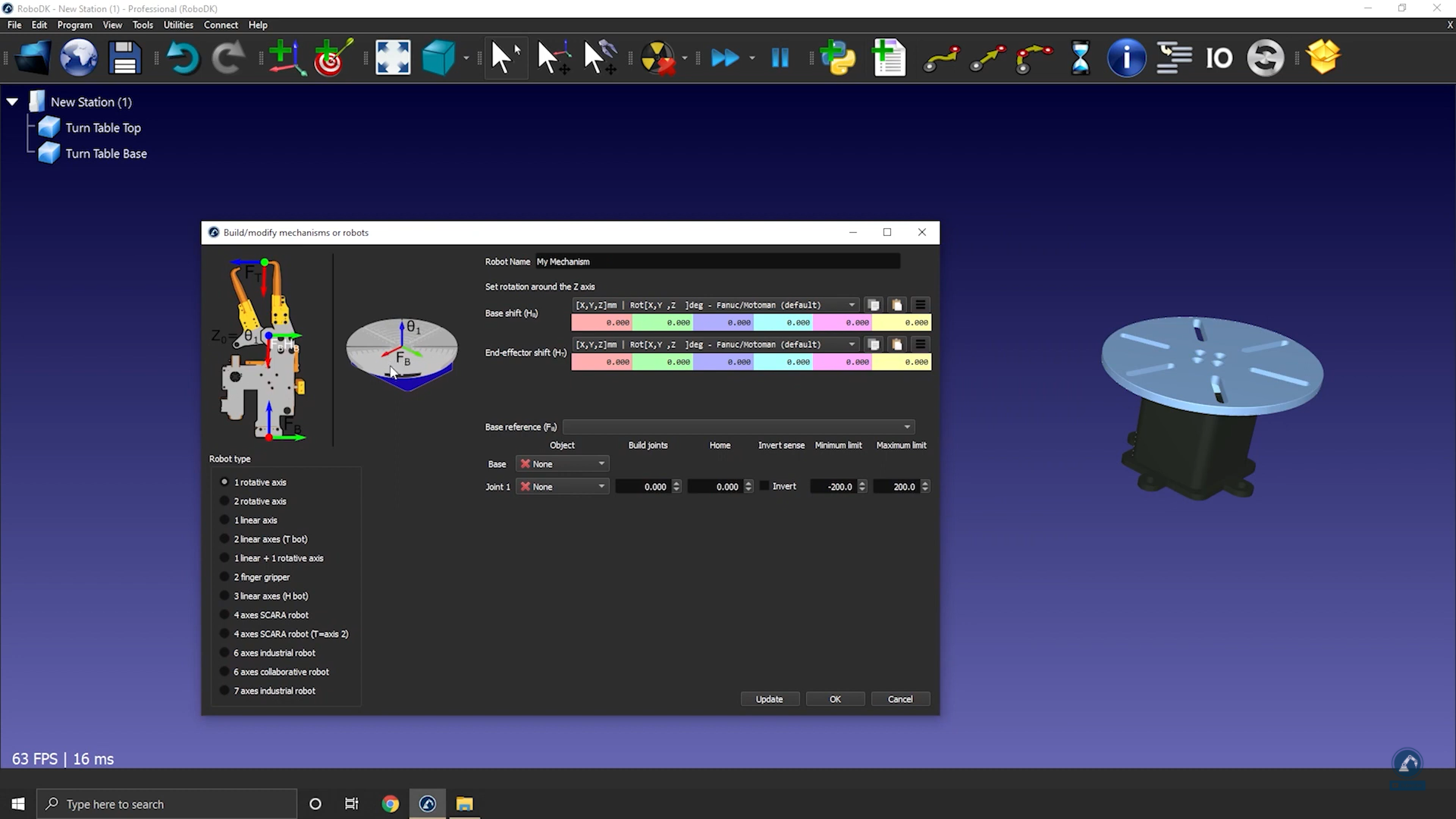
2.Selecione Utilitários➔ Modelar Mecanismo ou Robô.
3.Selecione 1 eixo rotativo.
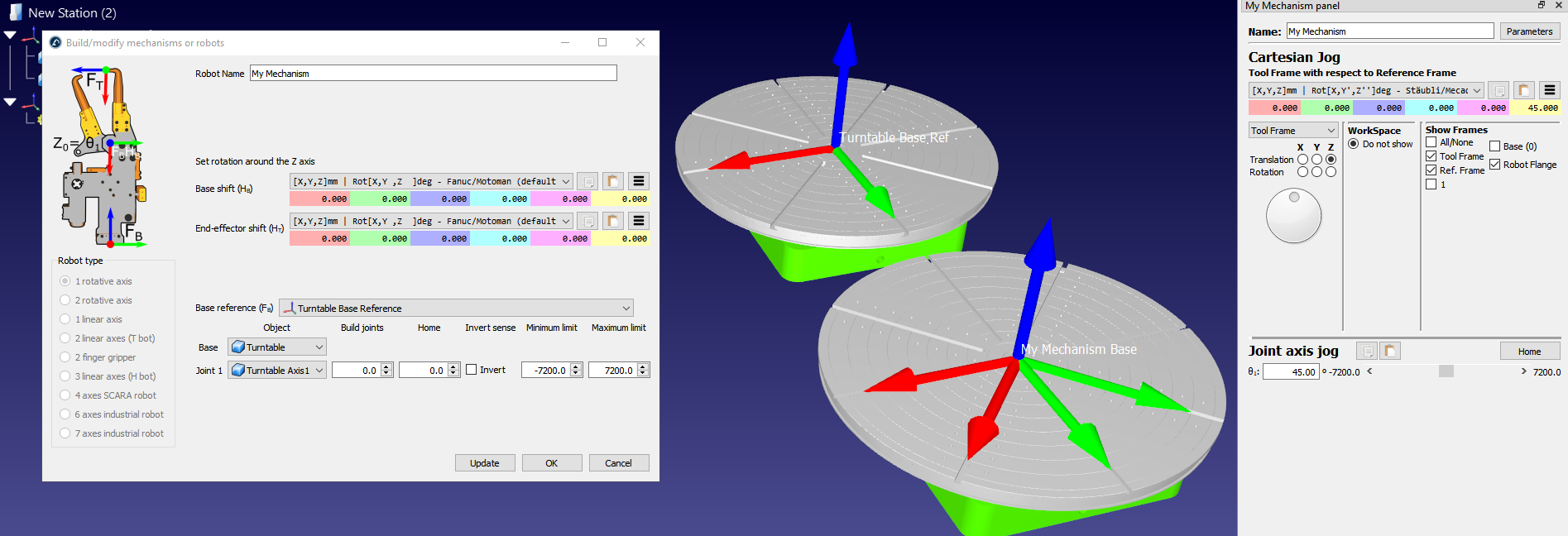
4.Se você observar a imagem, ela deverá mostrar como a base e a placa superior devem ser posicionadas. No caso de um eixo rotativo, o mecanismo girará em torno do eixo Z de Fb (Frame Base)
5.Renomeie seu mecanismo para TurnTable.
Defina a referência de sua plataforma giratória criando um novo sistema de coordenadas:
1.Crie um frame de referência e selecione F2 para nomeá-lo como Frame Base.
2.Modifique a posição da moldura abrindo o Painel Frame.
3.Selecione Ferramentas e Medição.
4.Meça a posição da superfície clicando no mecanismo; você pode ver a diferença entre a origem e o centro. Você pode copiar os valores e colá-los conforme mostrado na imagem abaixo.
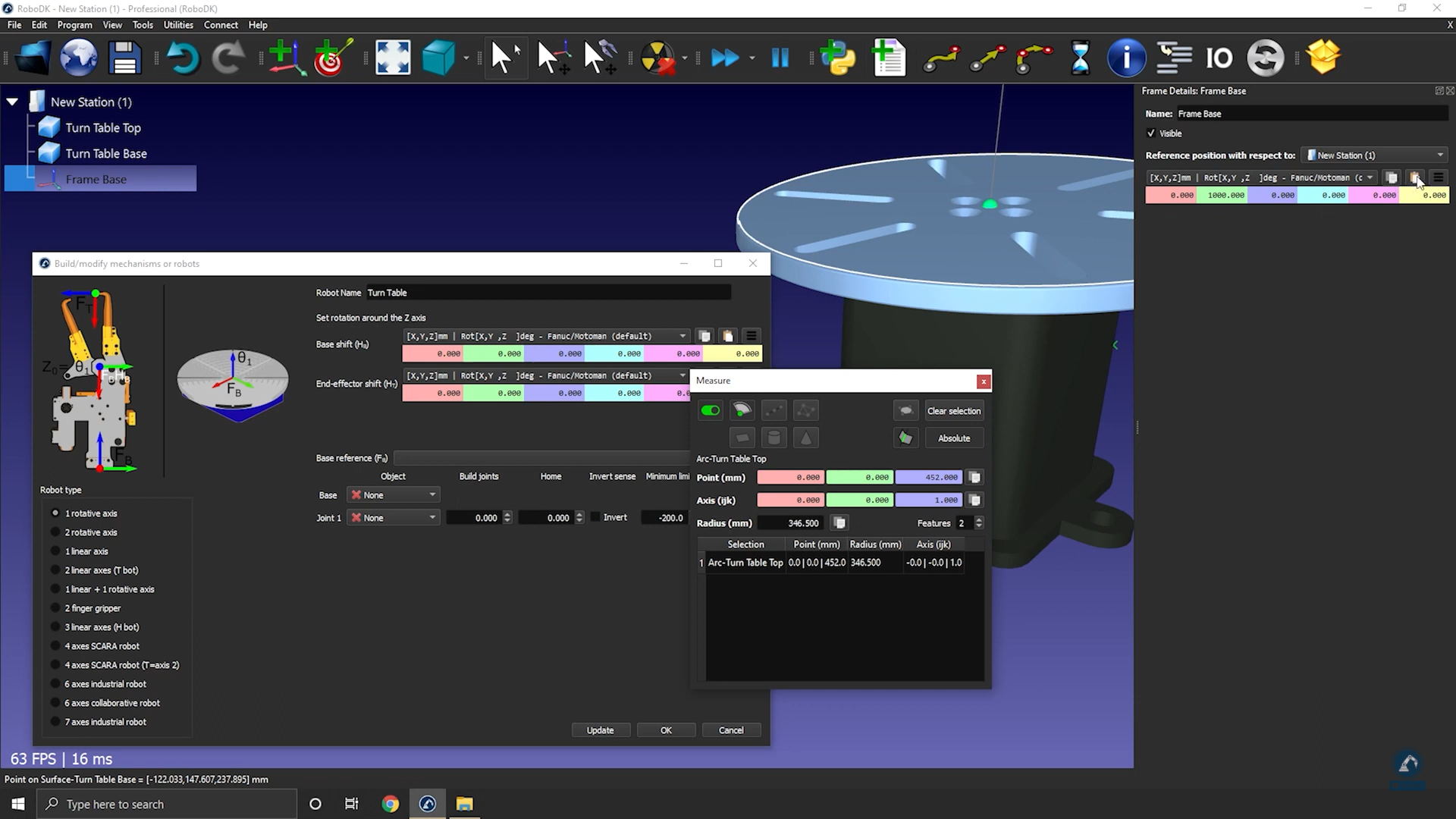
A posição de referência deve agora corresponder à referência na imagem. O frame de referência e os itens de objeto devem ser preenchidos automaticamente. Se a seleção automática não estiver correta, você pode atualizá-la adequadamente.
6.Você pode atualizar os limites do eixo, por exemplo, se quisermos ter +/-20 voltas, podemos inserir +/-7200 graus. Você também pode alterar os limites do eixo posteriormente clicando duas vezes nos rótulos de limite do eixo do painel do robô.
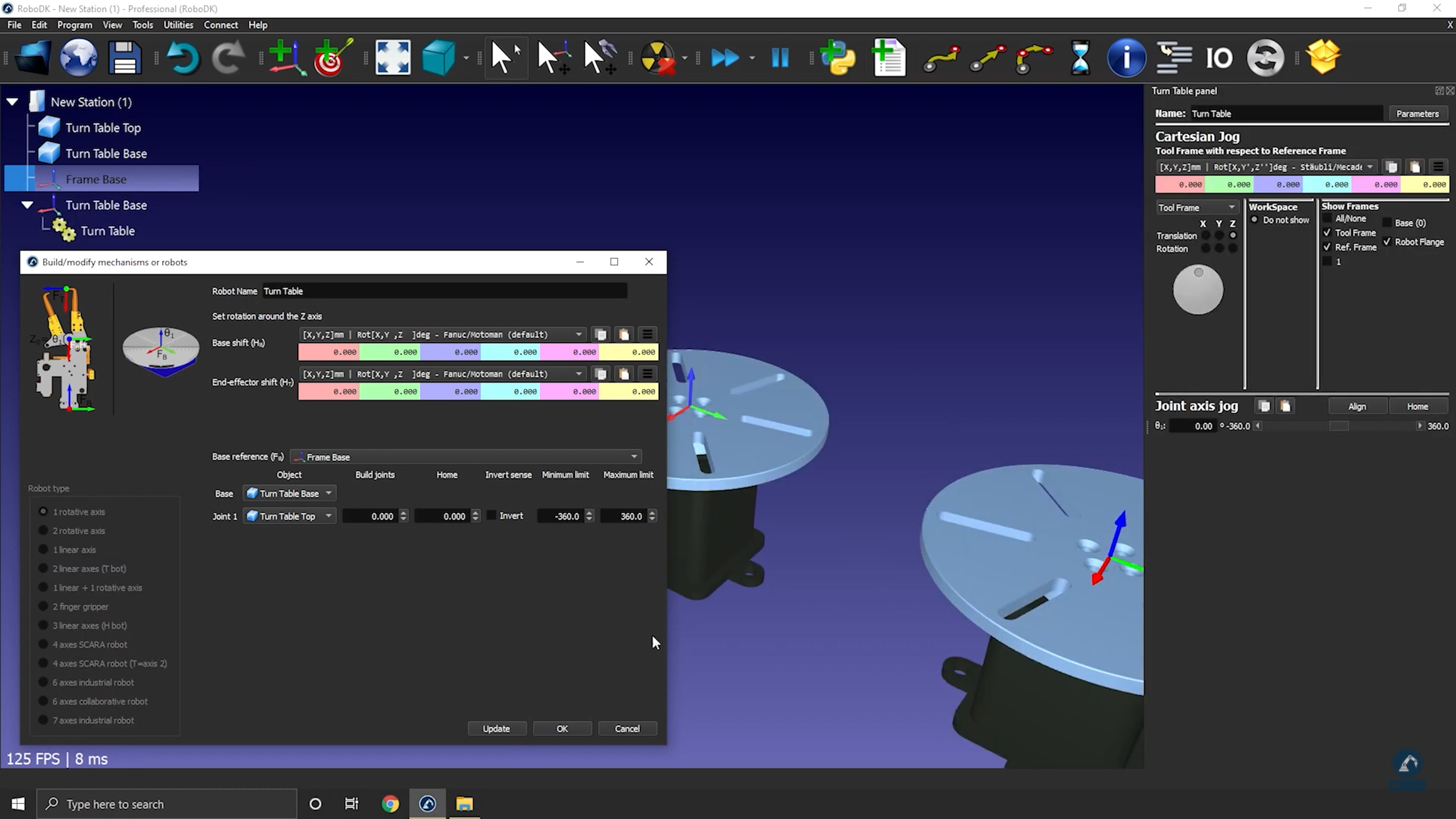
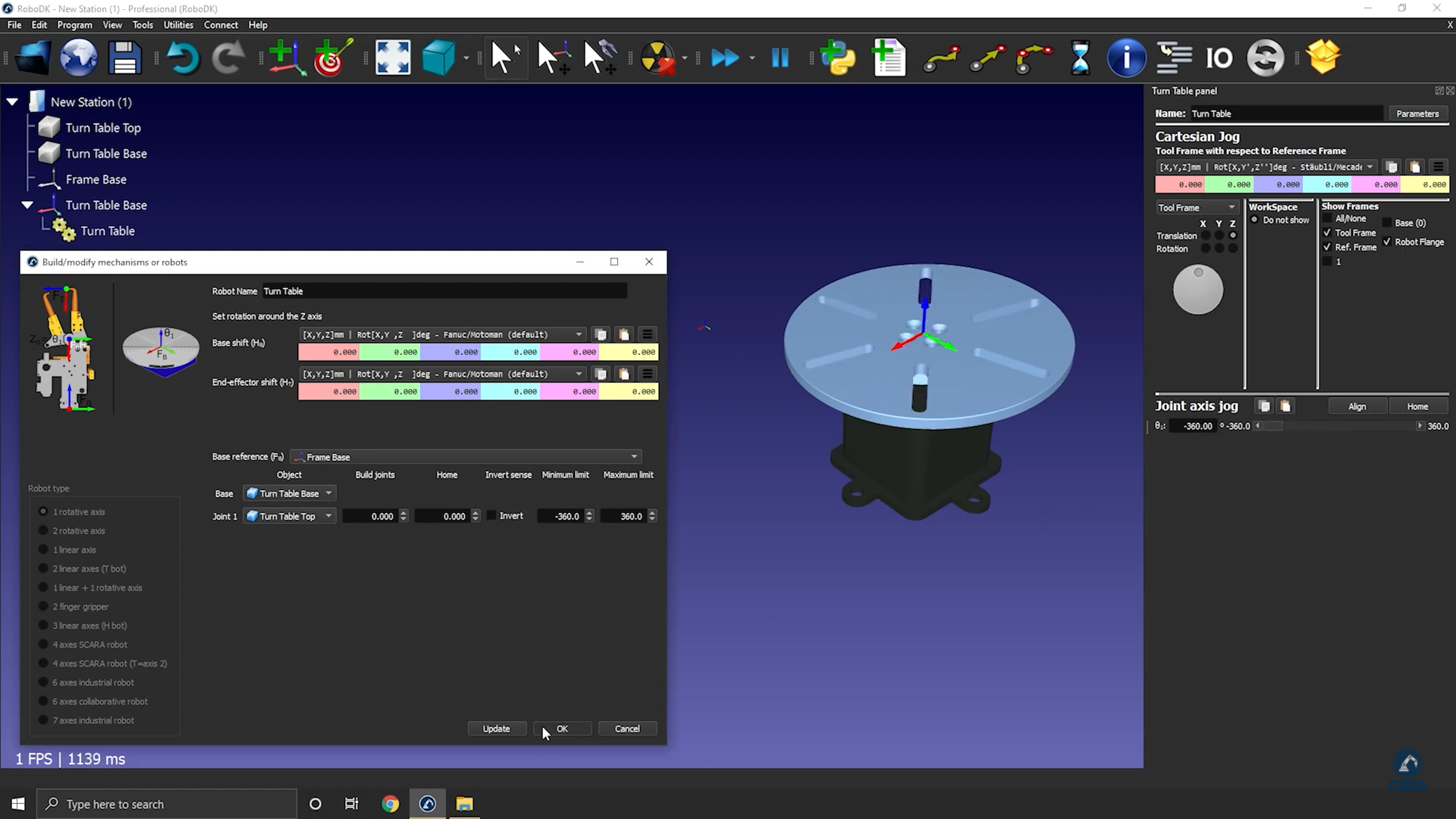
7.Selecione Atualizar para gerar o mecanismo: o novo mecanismo será exibido.
8.Você pode selecionar OK para fechar o menu ou adicionar outras alterações à sua mesa giratória, se necessário.
9.Você pode excluir os arquivos de objeto originais que usou para criar o mecanismo. O mecanismo será salvo com seu projeto RDK e não requer nenhuma dependência externa.
10.Depois de testar a tabela (verifique se ela está se movendo na direção certa e se os limites são os esperados), você pode selecionar OK na janela Modelar mecanismo para fechá-la.
Como modelar um trilho linear de um eixo
Esta seção mostra como modelar um trilho linear de 1 eixo, também conhecido como eixo linear ou pista linear. Um trilho linear ajuda a ampliar o alcance dos braços do robô.
Siga estas etapas para importar seu modelo 3D:
1.Arraste e solte seu modelo 3D no RoboDK para importar os objetos para sua estação (os formatos de arquivo aceitos incluem STEP, IGES ou STL, que são formatos 3D comuns).
Siga estas etapas para abrir seu construtor de mecanismos:
2.Selecione Utilitários➔ Modelar Mecanismo ou Robô
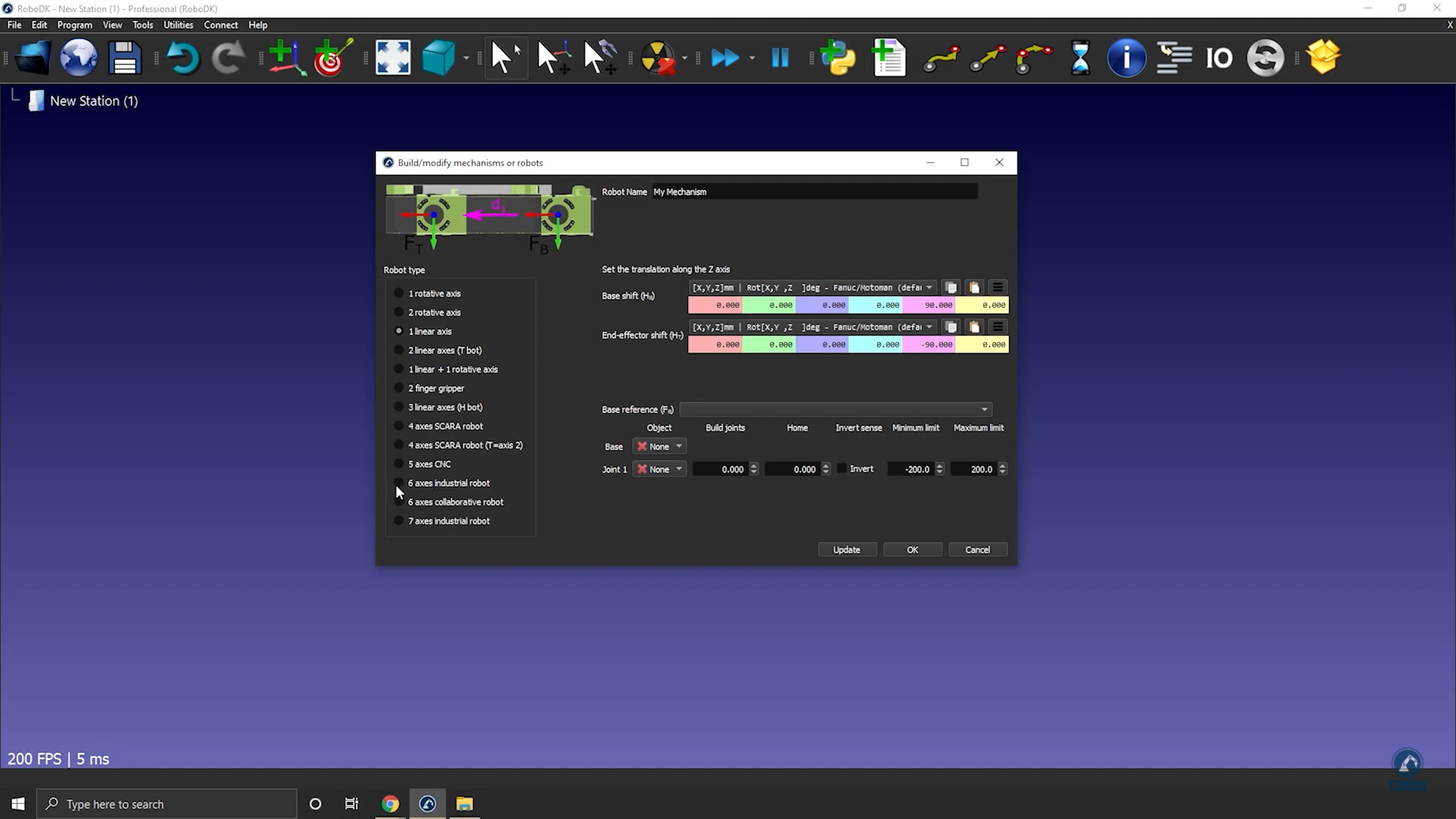
3.Certifique-se de que 1 eixo linear esteja selecionado em "Tipo de robô".
4.Se o seu modelo 3D estiver agrupado em uma única peça, você pode dividir o modelo dentro do RoboDK.
Siga estas etapas para posicionar sua estrutura de base:
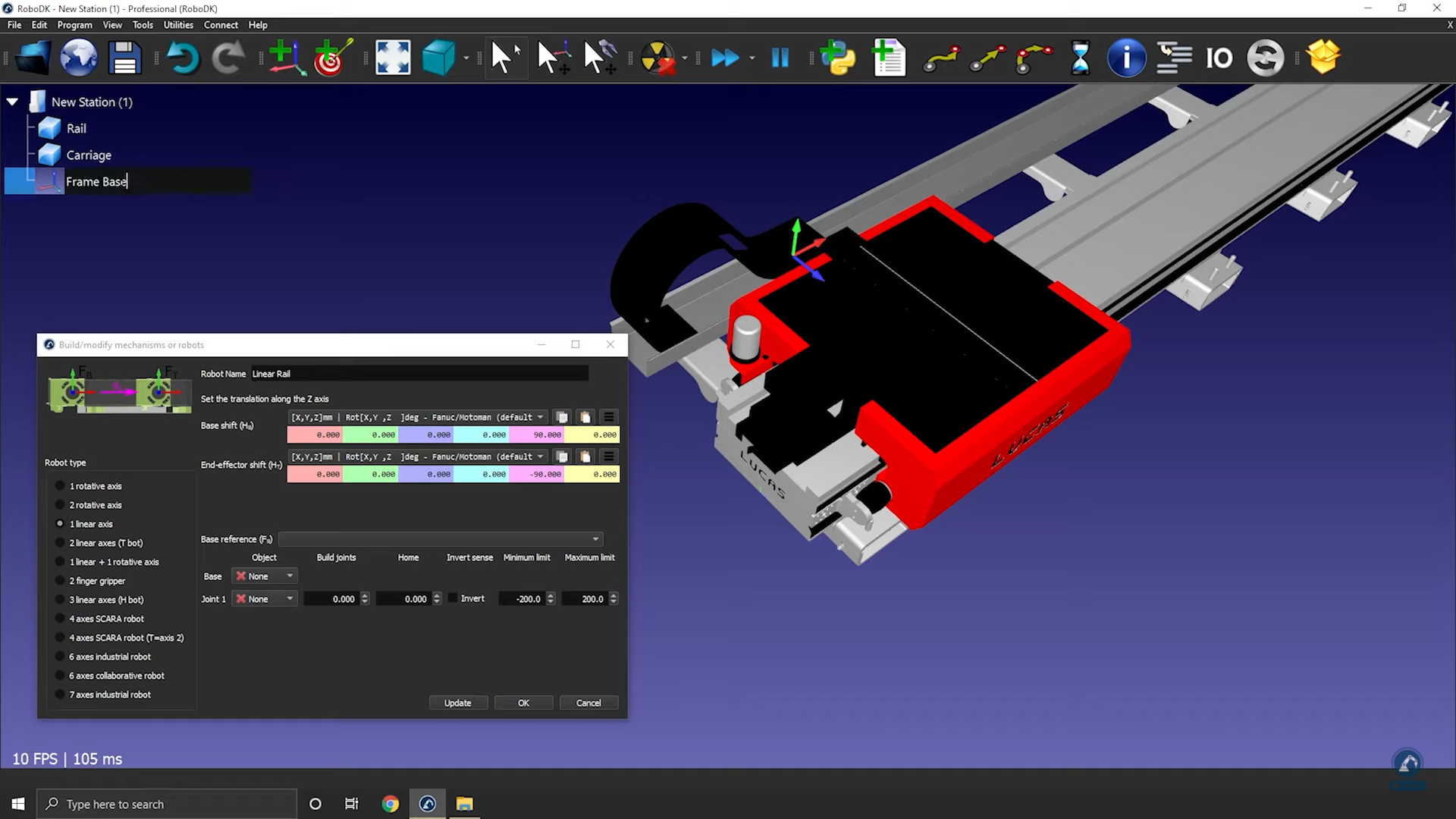
5.Agora que os objetos estão carregados, abra novamente o construtor de mecanismo de modelo Utilitários➔ Modelar mecanismo ou Robô.
6.Você pode renomear seu mecanismo em Nome do robô.
7.Considere que seu frame de base deve estar na posição 0 do trilho: Crie um frame de referência nesse local e nomeie-o Frame Base.
Siga estas etapas para modificar a posição da moldura:
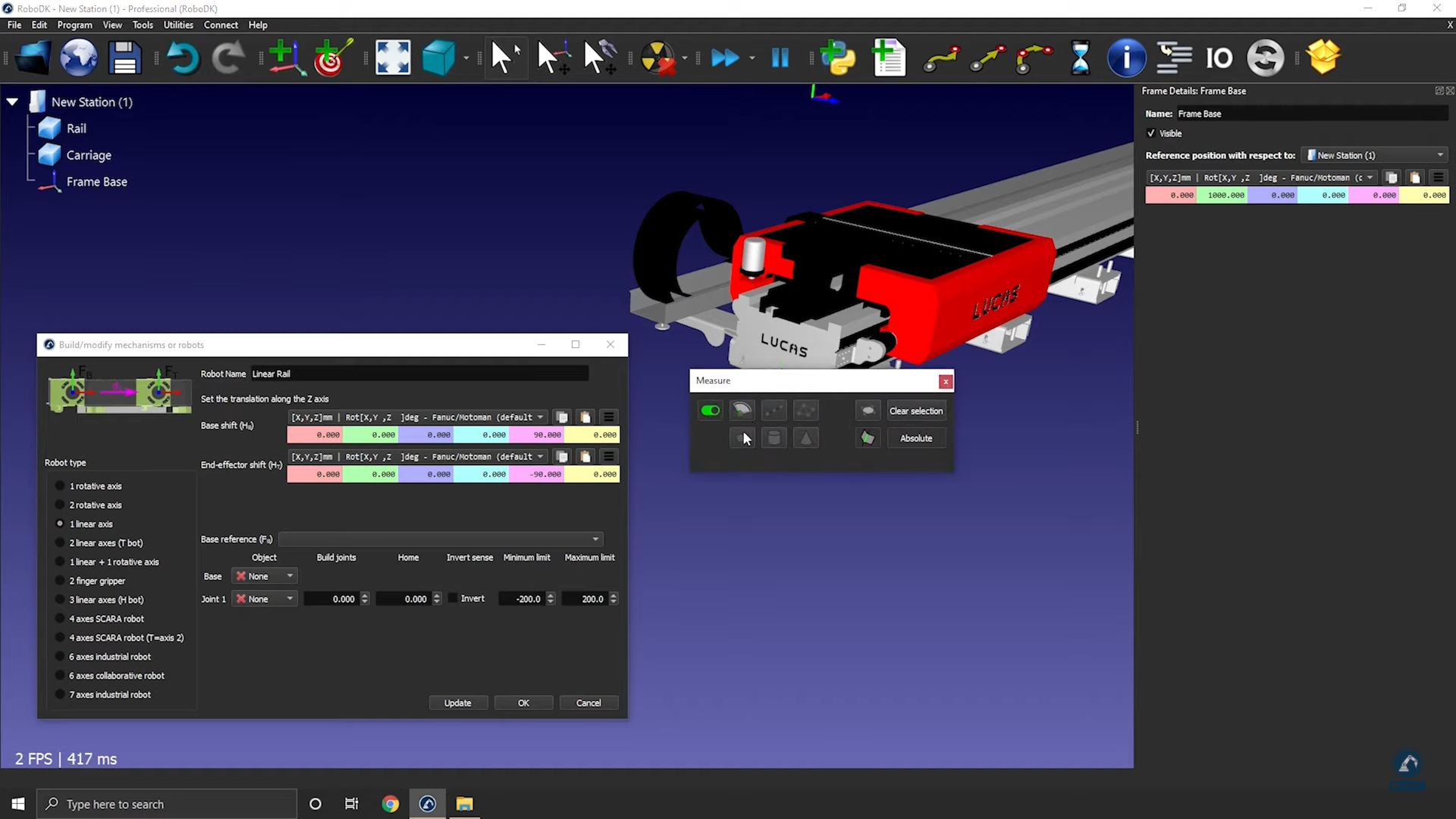
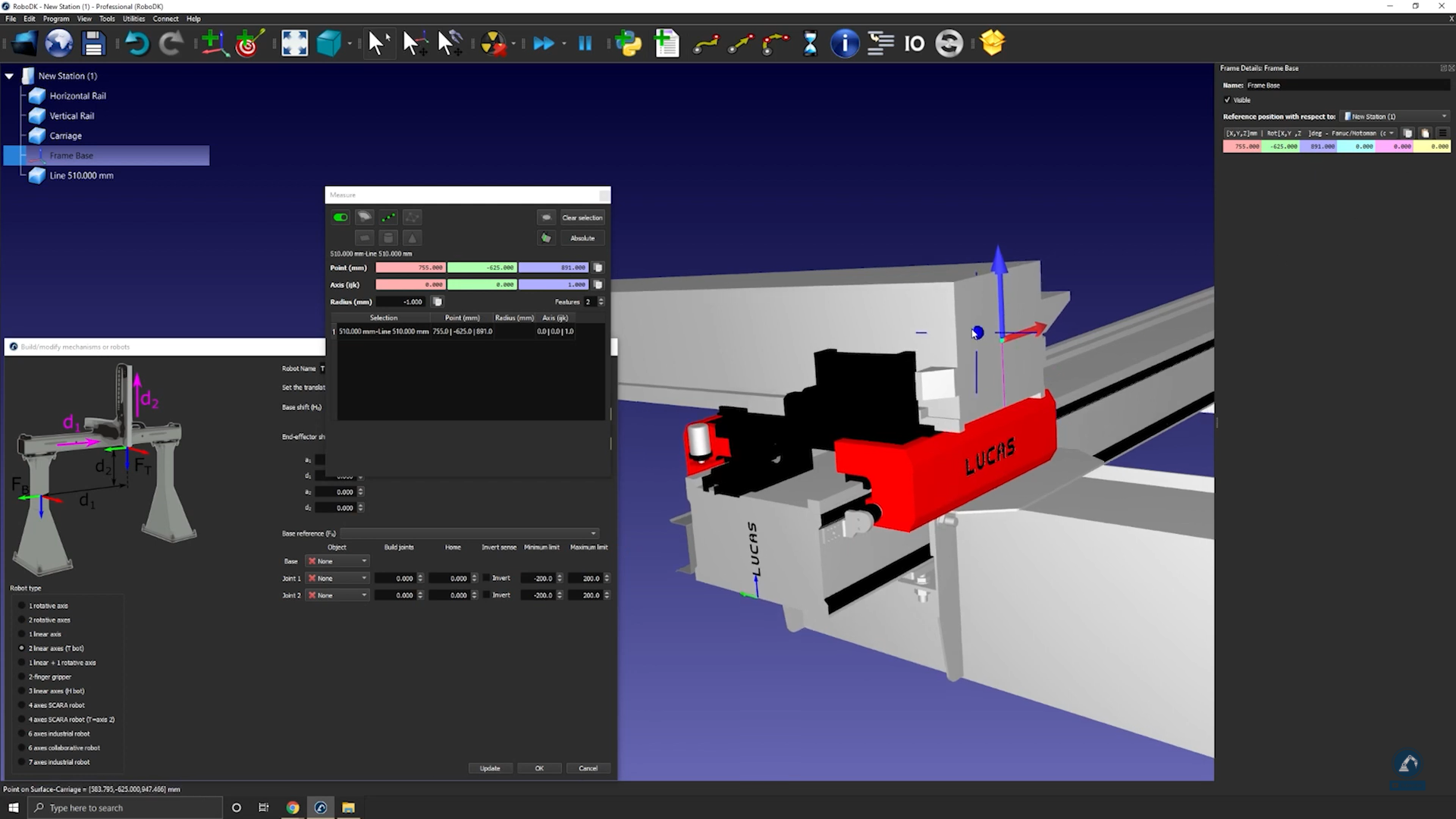
8.Selecione Ferramentas ➔ Medição
9.Use a ferramenta de medição para medir a posição da superfície selecionando o ícone (conforme mostrado na imagem abaixo).
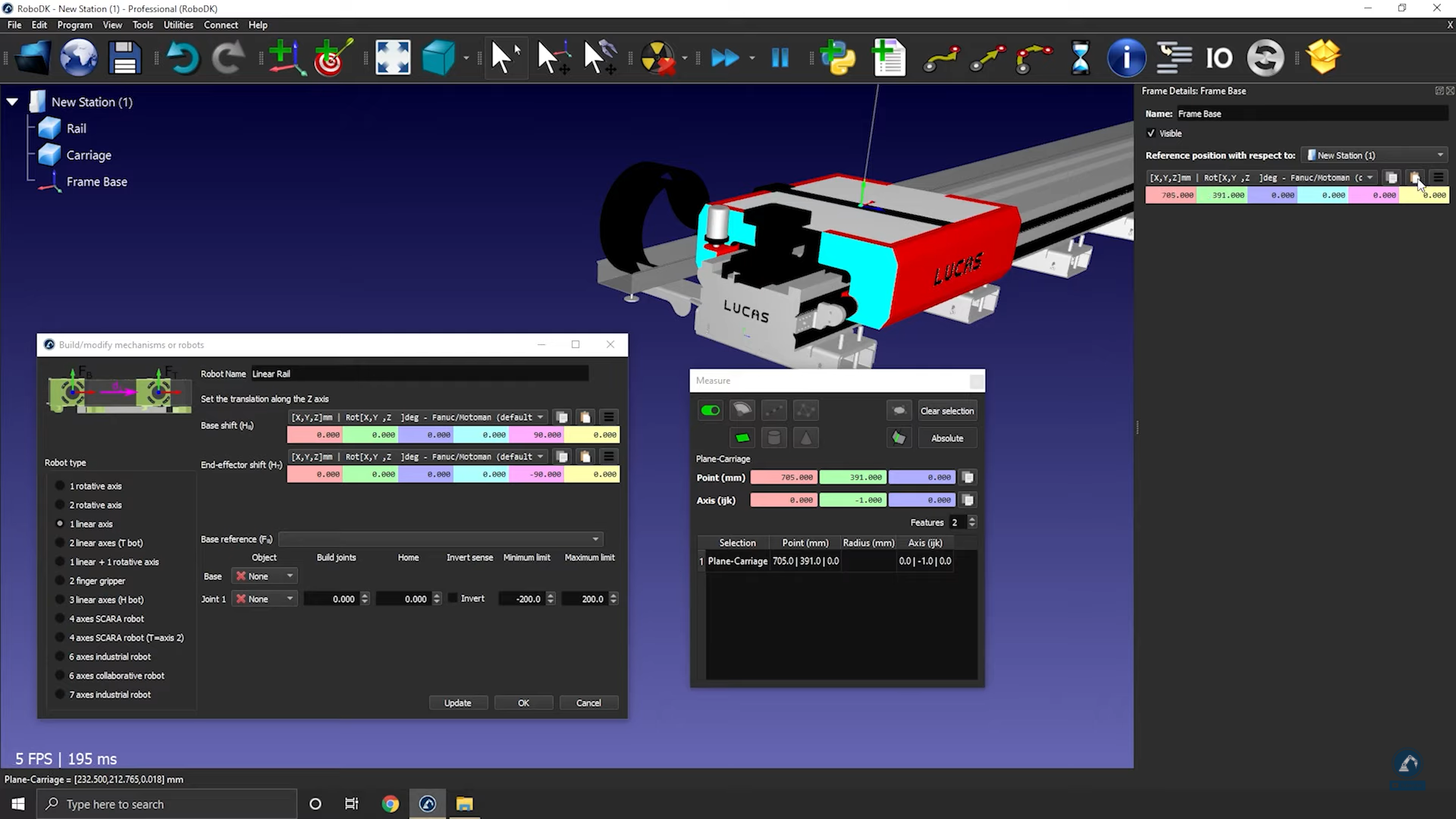
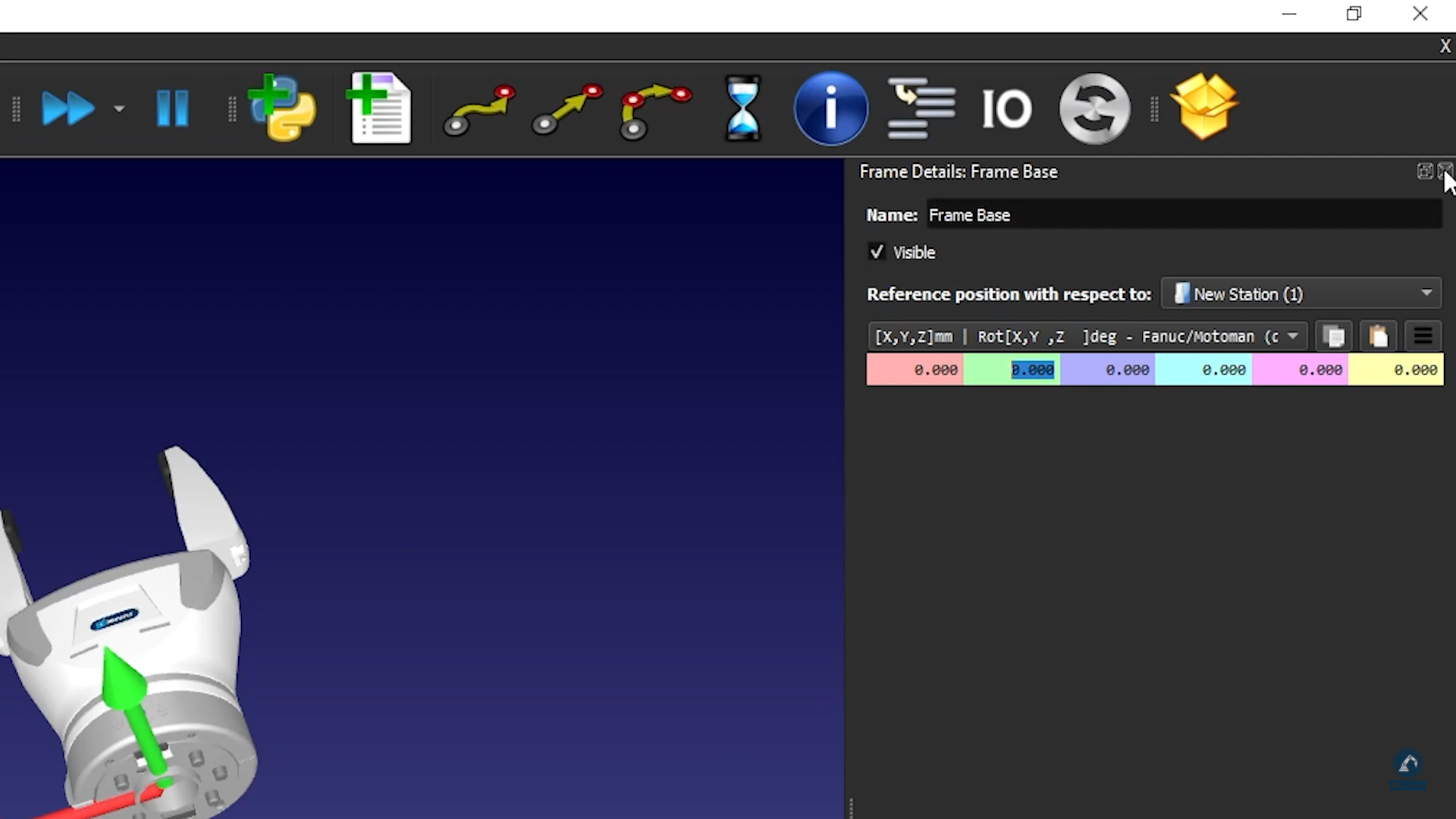
10.Copie os valores e cole-os em Detalhes do Frame: Frame Base (como mostrado na imagem abaixo).
Siga estas etapas para verificar as orientações e inserir o comprimento do trilho:
11.Girar no sentido horário, 90 graus em torno de X: Digite o valor -90.000 graus na janela de posição de referência.
12. Digite o comprimento do trilho na janela do mecanismo do modelo (conforme mostrado na imagem abaixo).
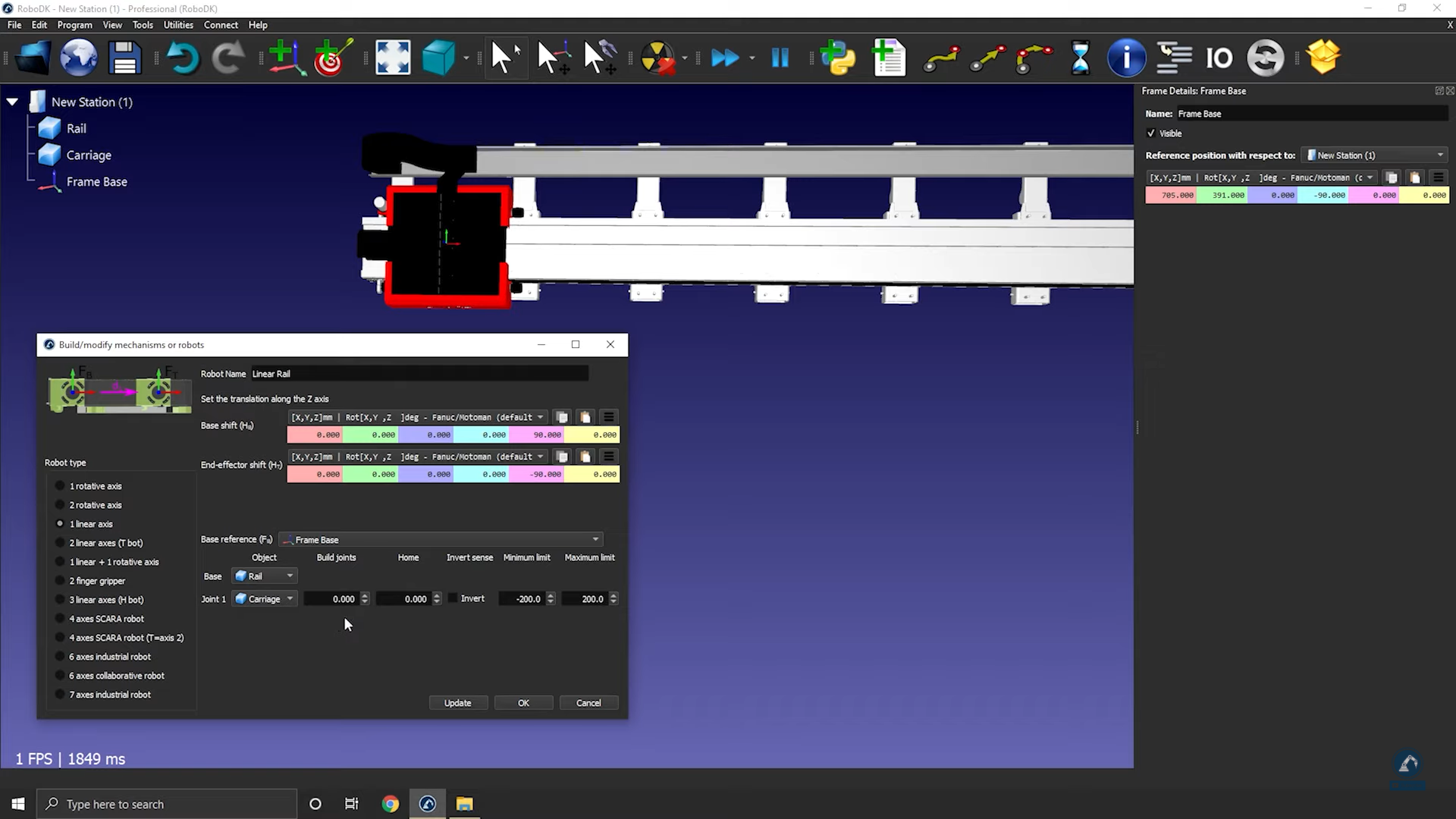
13.Selecione Atualizar para criar o robô.
14.Você pode testar o trilho (certificar-se de que os limites estão corretos e que ele está se movendo na direção correta) usando o moimento do eixo.
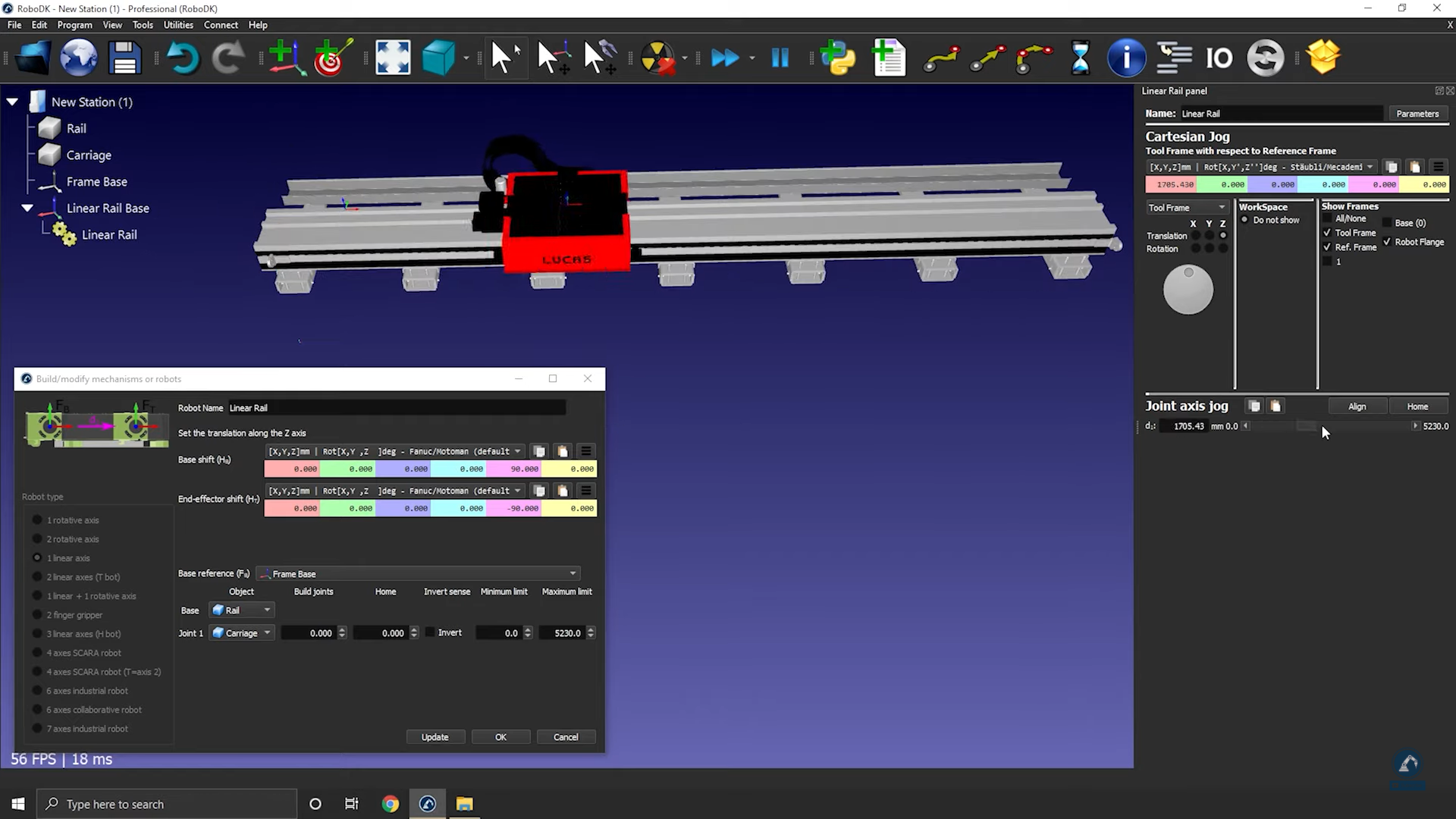
15.Selecione OK quando você estiver satisfeito com os resultados.
Como modelar um trilho linear de dois eixos
Este exemplo mostra como modelar um trilho linear de 2 eixos, também conhecido como eixos lineares ou pista linear. Os eixos lineares são usados para ampliar o alcance dos braços do robô.
Siga estas etapas para configurar seu modelo 3D no RoboDK:
1.Importe seu modelo 3D para o RoboDK➔ e arraste e solte o arquivo STEP em sua estação.
2.Abra o Construtor de mecanismos: Utilitários➔ Modelar mecanismo ou Robô.
3.Em Tipo de robô, selecione 2 Eixos lineares (T-bot)
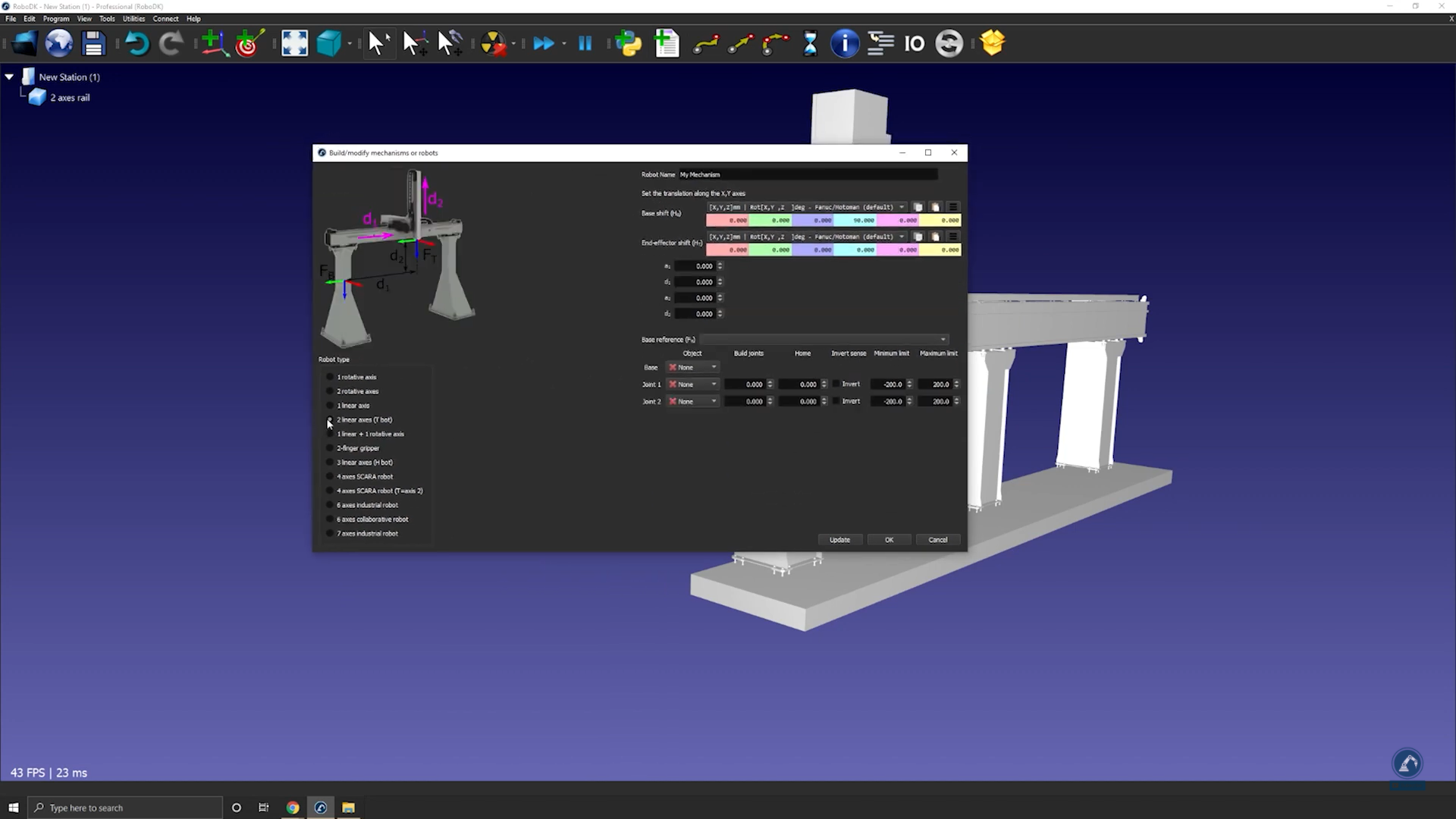
4.Quando o modelo estiver dividido em três partes, abra novamente o construtor de trilhos: Selecione Utilitários ➔ Modelar mecanismo ou Robô.
5.Selecione a opção: 2 eixos lineares (T-bot).
6.Renomeie seu robô para T-bot (em nome do robô).
Siga estas etapas para encontrar a localização de sua estrutura de base:
7.Se você considerar que o frame de base deve estar na posição 0 do trilho, crie o frame de referência exatamente nessa posição e renomeie-o para Frame Base.
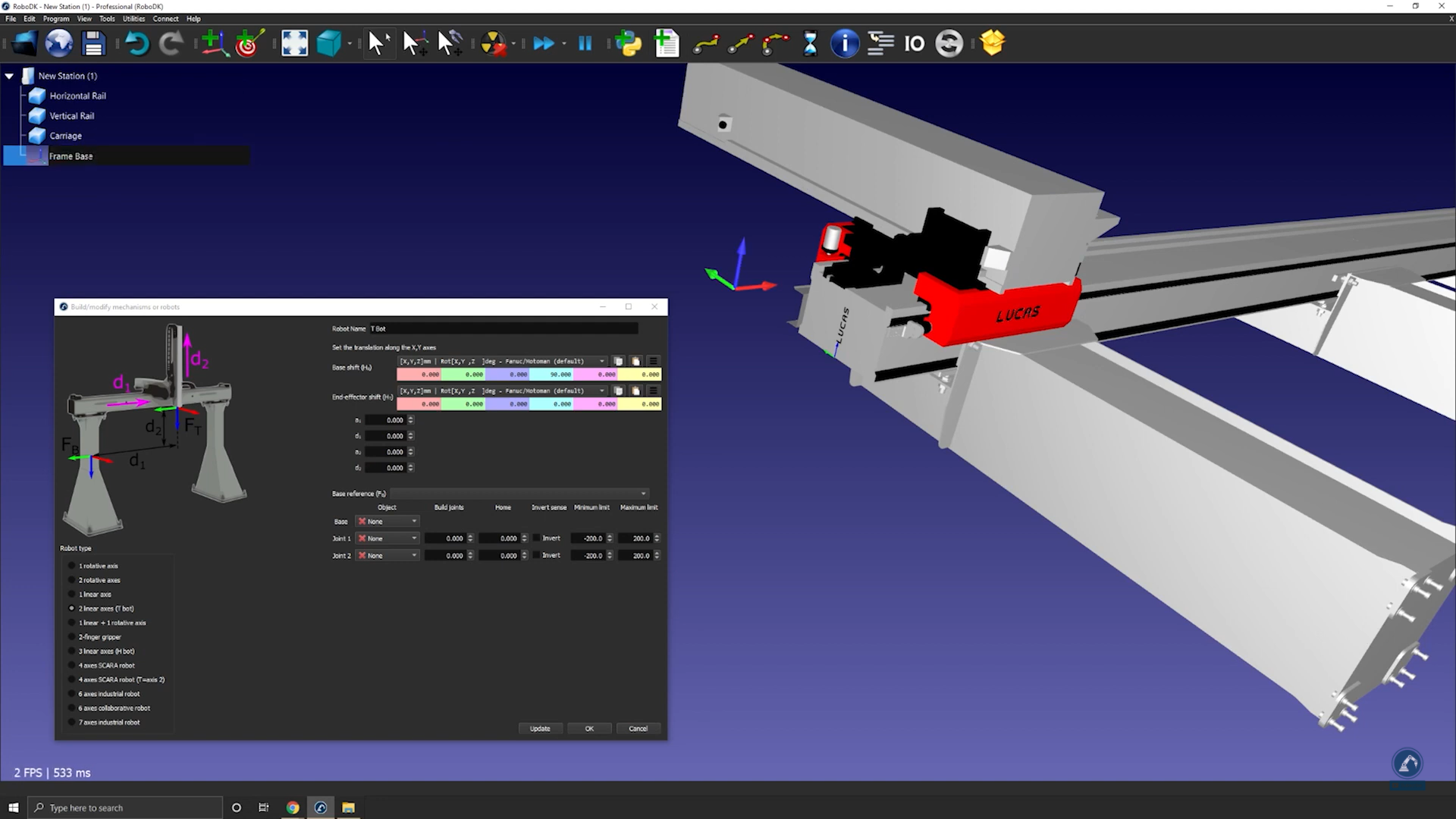
Siga estas etapas para modificar a posição da moldura:
8.Abra o painel de molduras clicando duas vezes na moldura.
9.Meça a posição do centro da superfície abrindo sua ferramenta de medição: Ferramentas➔ Medir
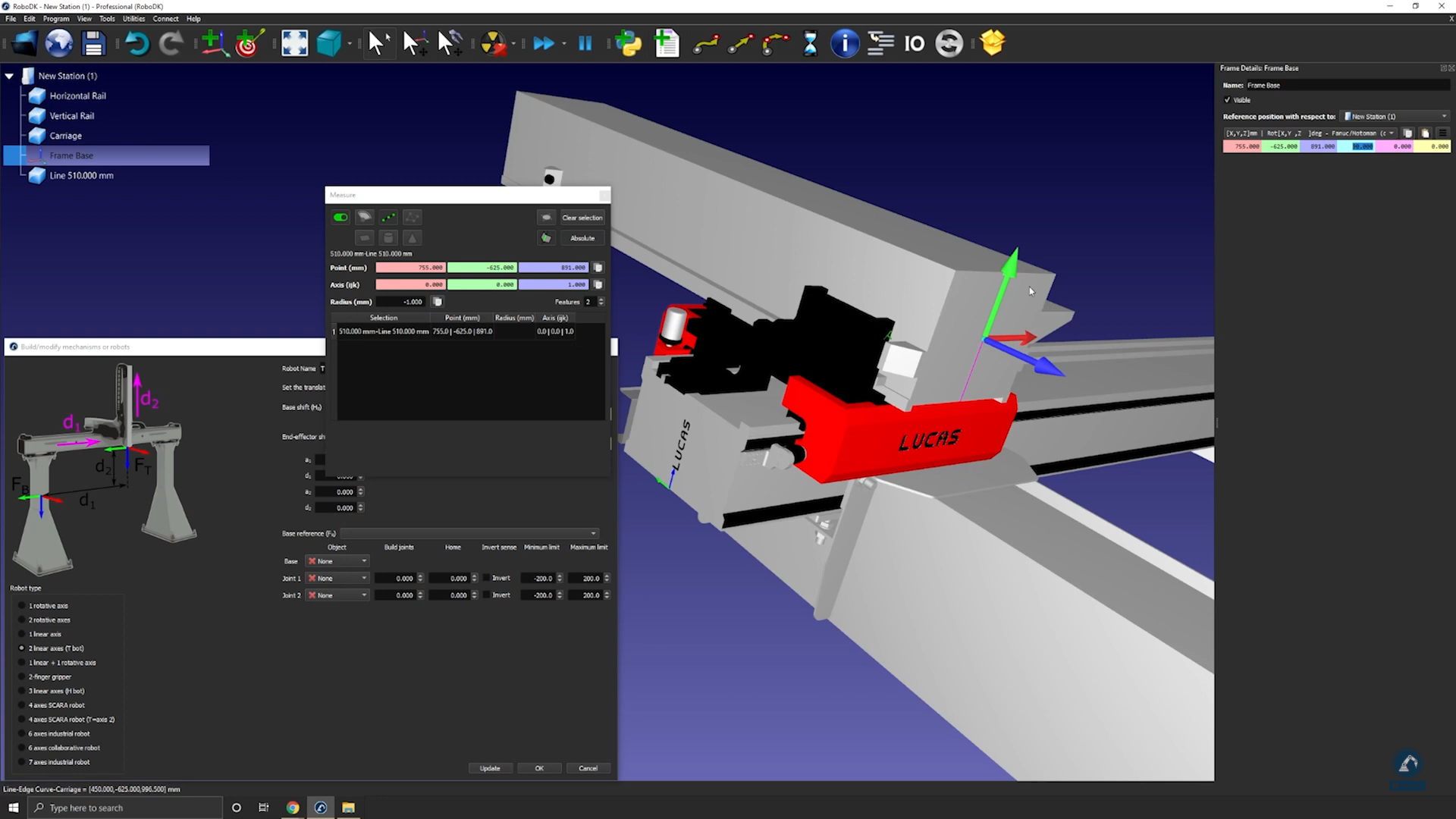
10.Selecione o ponto central de cada borda (conforme mostrado abaixo) para encontrar a distância entre as duas linhas.
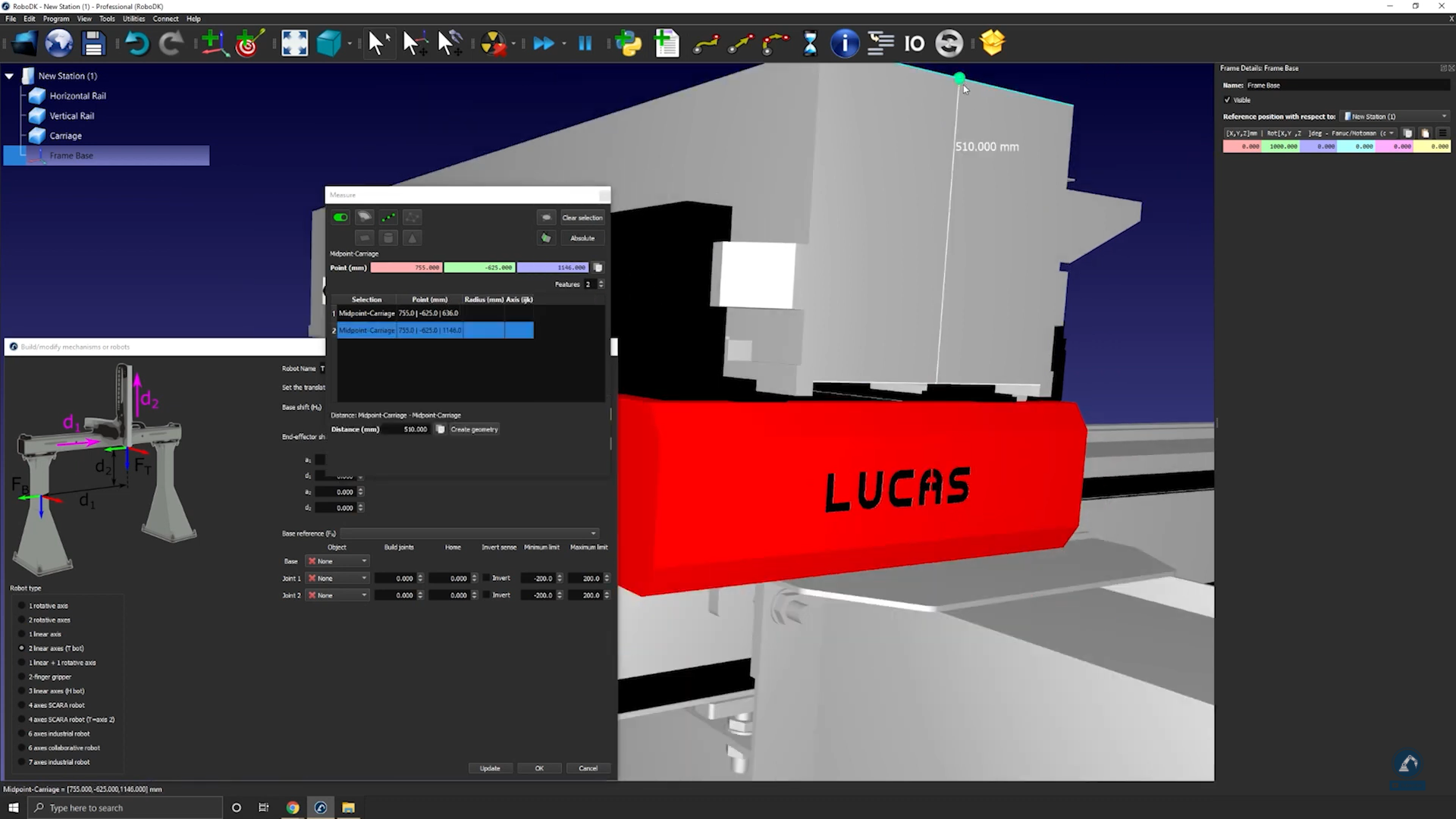
11.Selecione Criar geometria na janela Medição, que criará uma linha entre os dois pontos.
12.Selecione Limpar seleção.
Siga estas etapas para medir a posição do ponto central entre as duas linhas:
13. Selecione o ponto central da linha.
14.Copie os valores na janela Medição e cole os valores como a posição do quadro (conforme mostrado abaixo).
Siga estas etapas para garantir que as orientações sejam as mesmas:
15.Gire 90 graus no sentido anti-horário em torno de X e, em seguida, gire 90 graus em torno do eixo Z (conforme mostrado abaixo).
16.Digite as medidas do trilho na janela Modelar mecanismo ou Robô (Modelo de mecanismo ou robô), conforme mostrado abaixo.
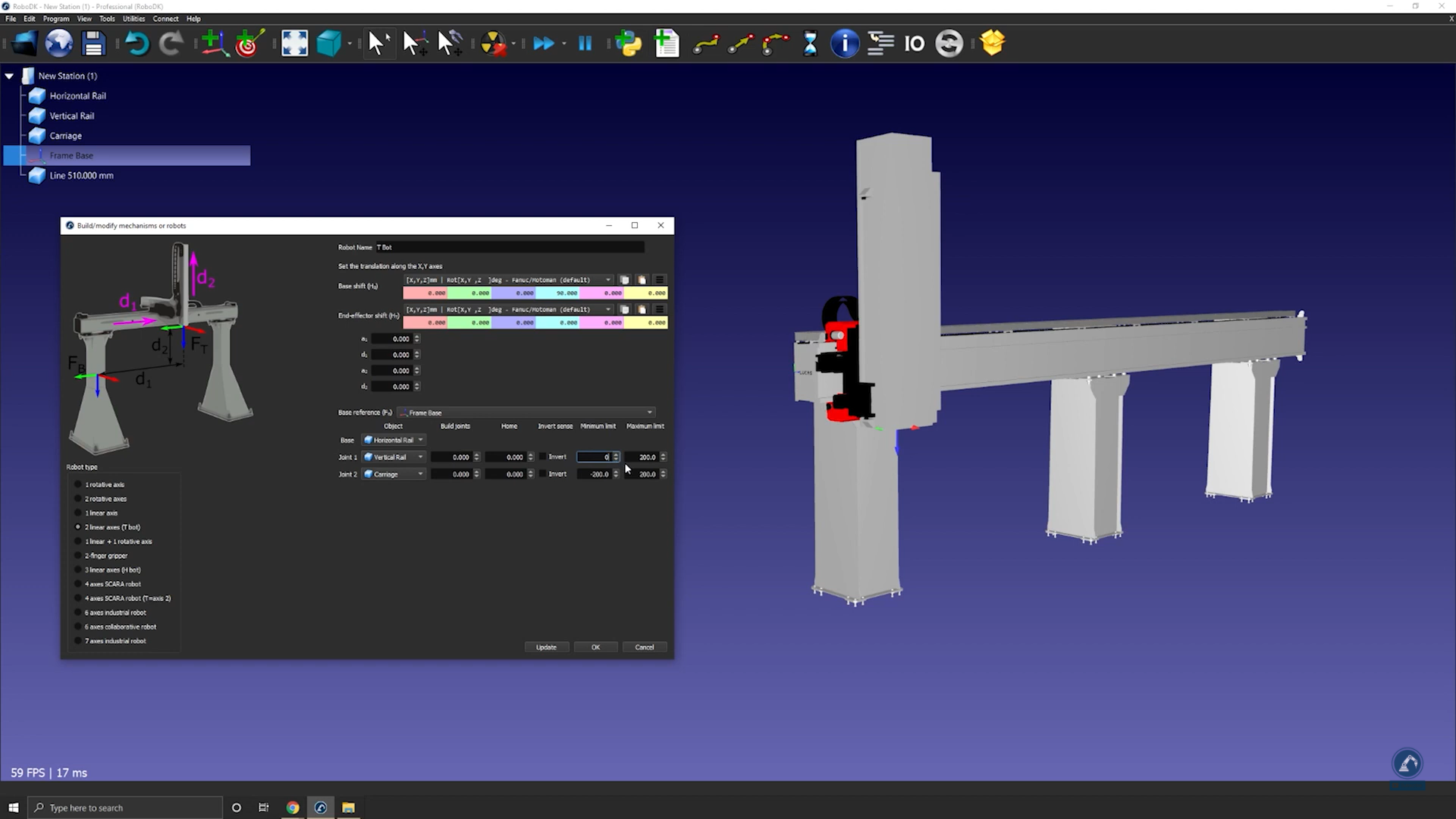
17.Selecione Atualizar para criar o robô.
18.Se Você estiver satisfeito com os resultados, selecione Ok na janela "Modelar mecanismo ou Robô".
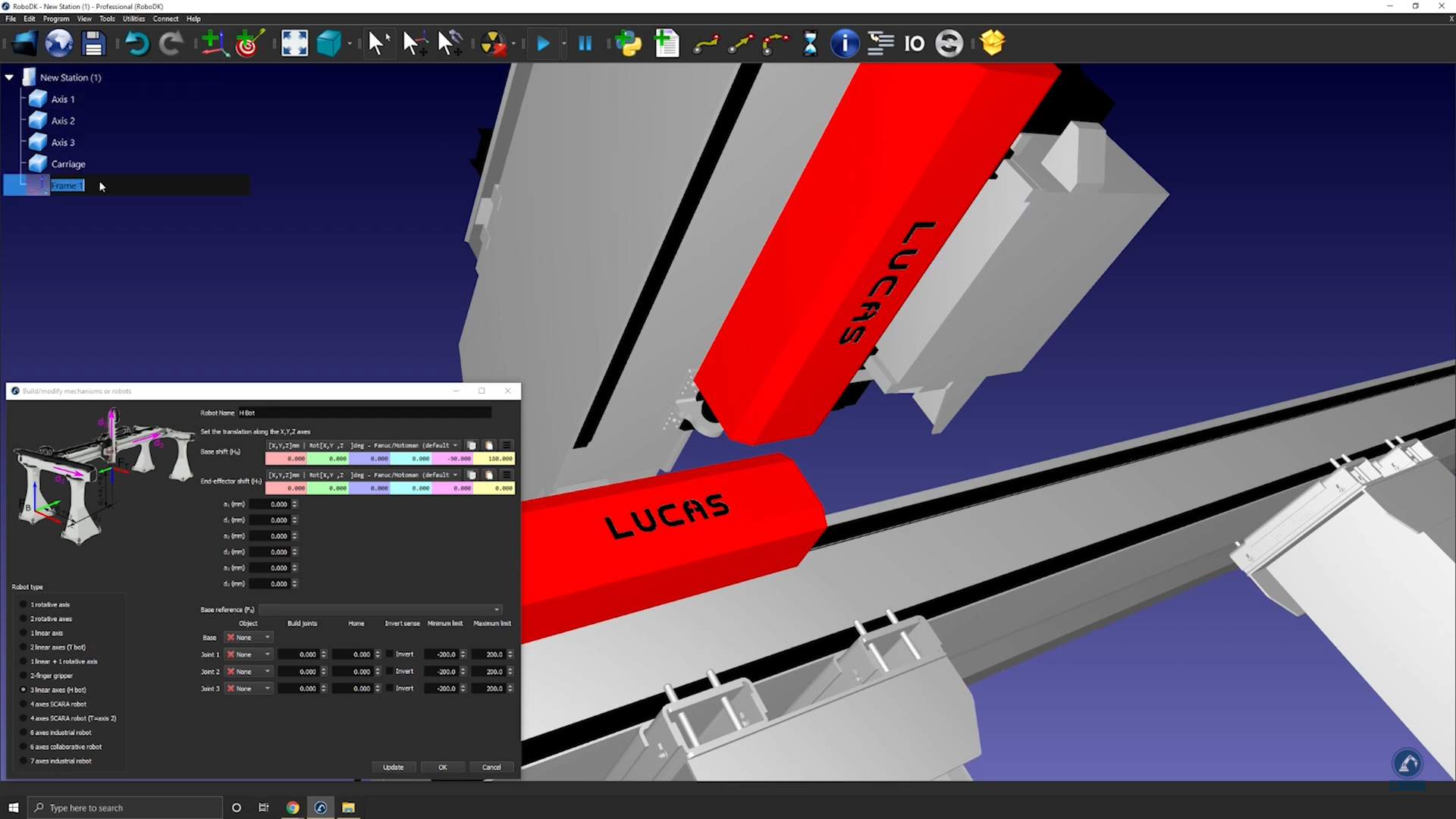
Como modelar um robô cartesiano de três eixos
O vídeo a seguir mostra como modelar um robô cartesiano de 3 eixos (H-bot). Os braços do robô podem ser montados em eixos externos para ampliar seu alcance.
Siga estas etapas para configurar seu modelo 3D no RoboDK:
1.Arraste e solte o modelo 3D (como um arquivo STEP ou IGES) no RoboDK para carregá-lo em sua estação.
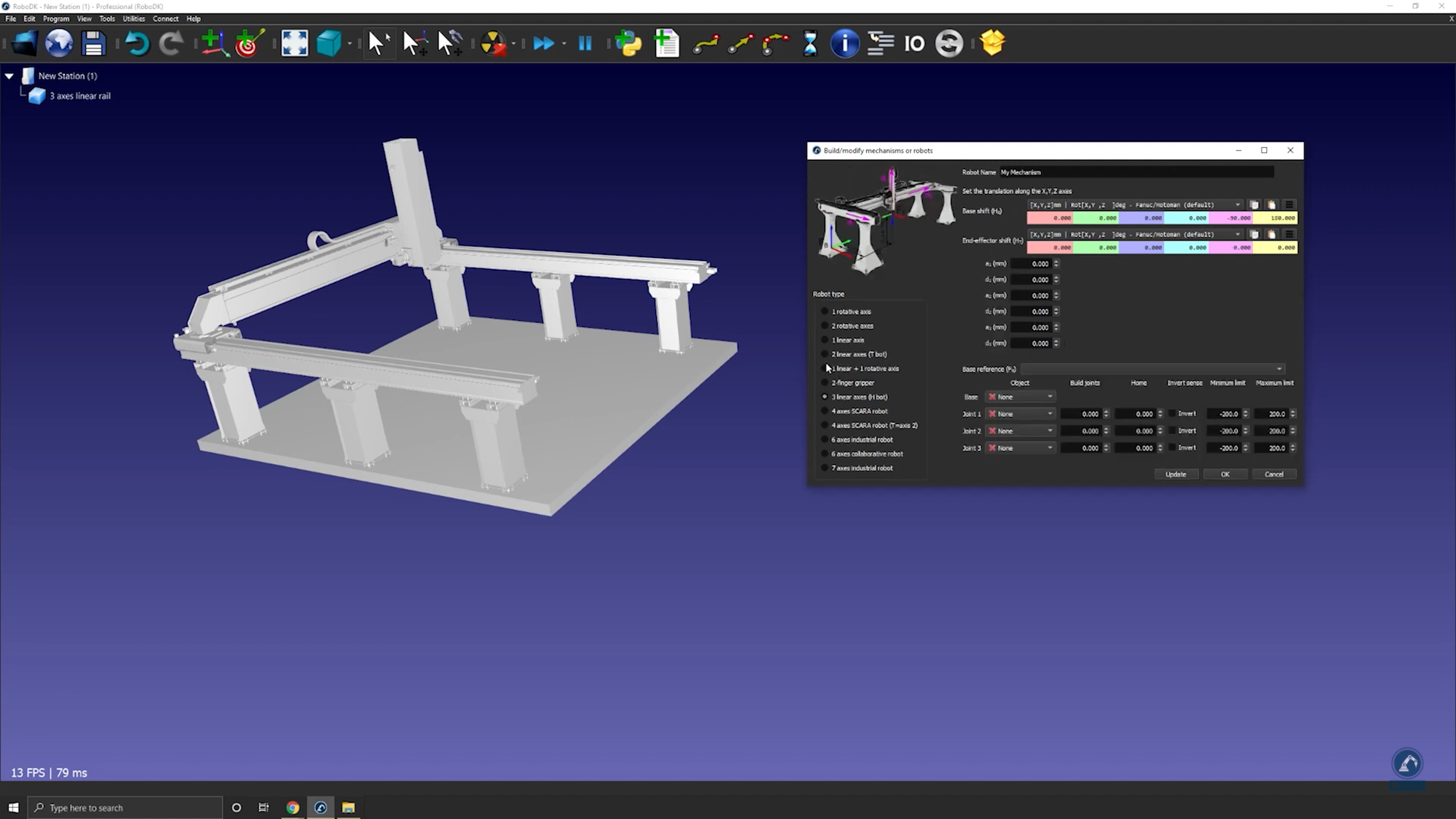
2.Abra o construtor de mecanismos: selecione Utilitários➔ Modelar mecanismo ou Robô
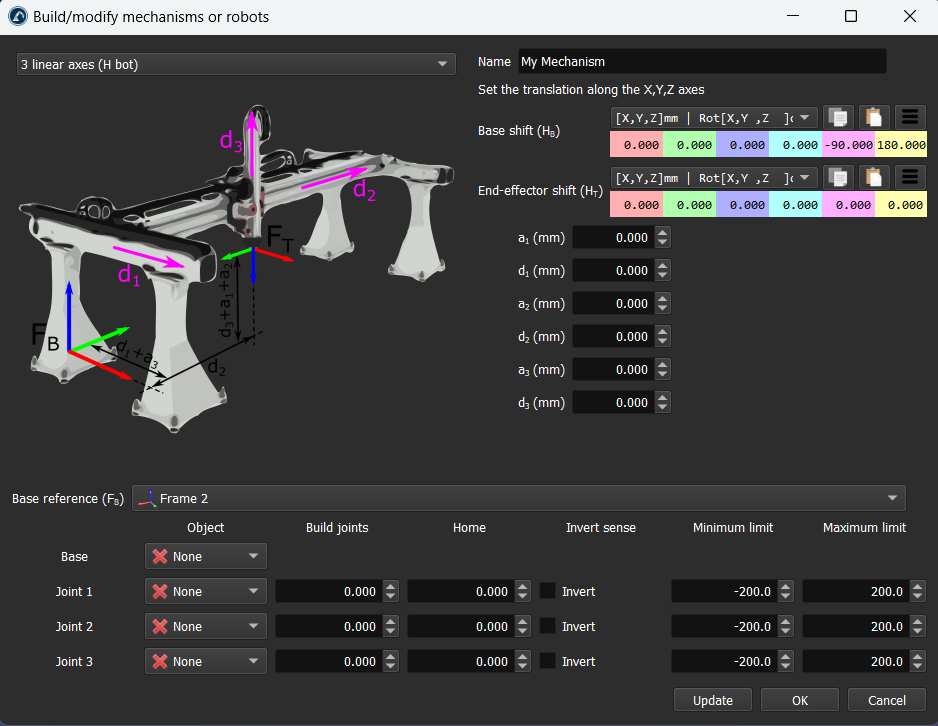
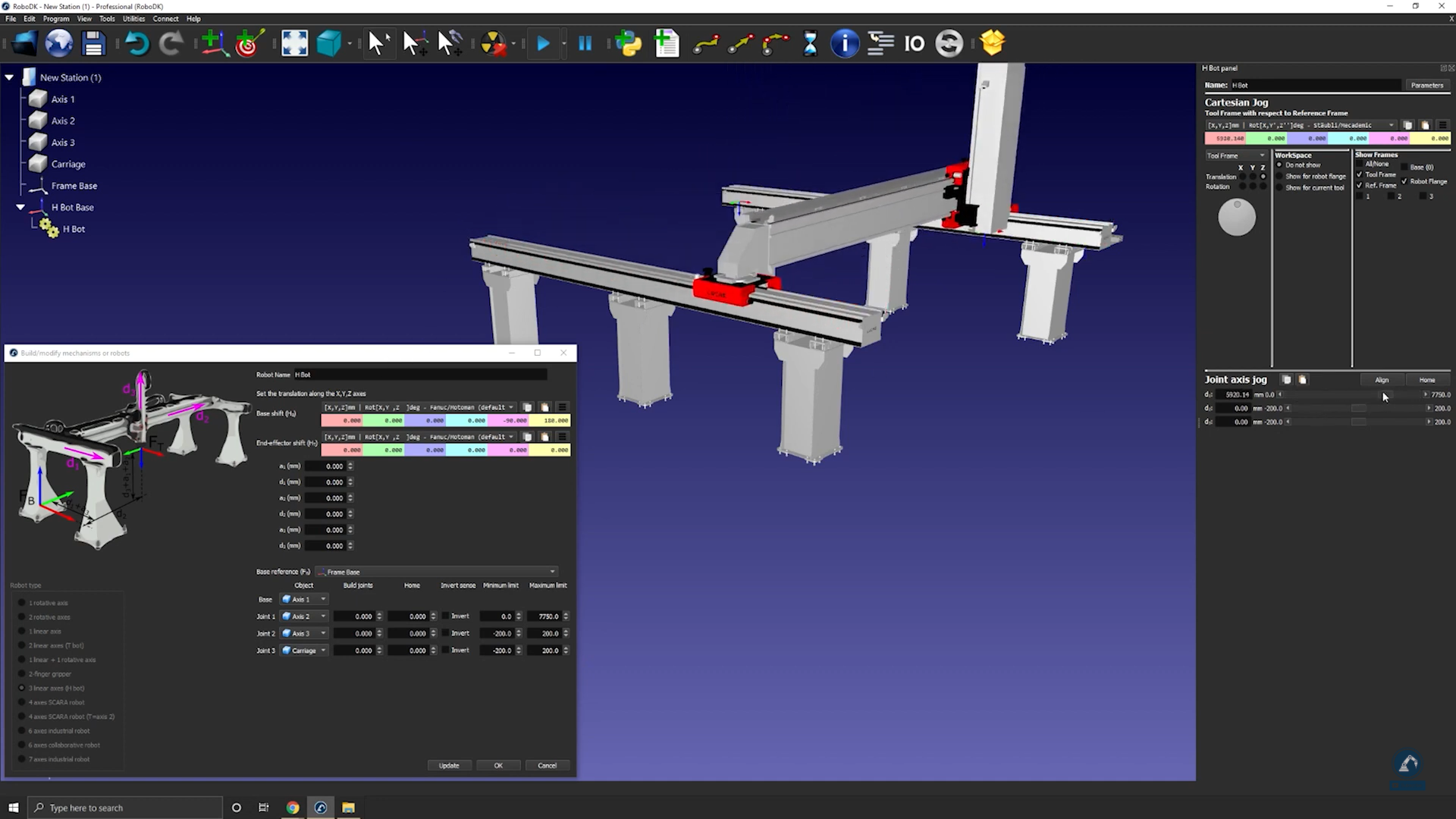
3.Em Tipo de robô, selecione 3 Eixos lineares(H-bot).
Siga estas etapas para criar seu Base Frame:
4.Quando o objeto estiver dividido em diferentes partes, abra novamente o construtor de trilhos (selecione Utilitários➔ Modelar Mecanismo ou Robô➔ 3 Eixos lineares).
5.Renomeie seu robô em Nome do robô.
6.Crie um frame de referência na posição 0 do trilho. Você pode renomeá-lo como Frame Base.
Siga estas etapas para modificar a posição da moldura:
7.Abra o painel de quadros clicando duas vezes em "Frame Base".
8.Abra a ferramenta de medição: Ferramentas ➔ Medição.
9.Selecione o ícone destacado abaixo na ferramenta de medição e, em seguida, selecione as duas bordas do objeto para encontrar a distância entre os dois pontos centrais.
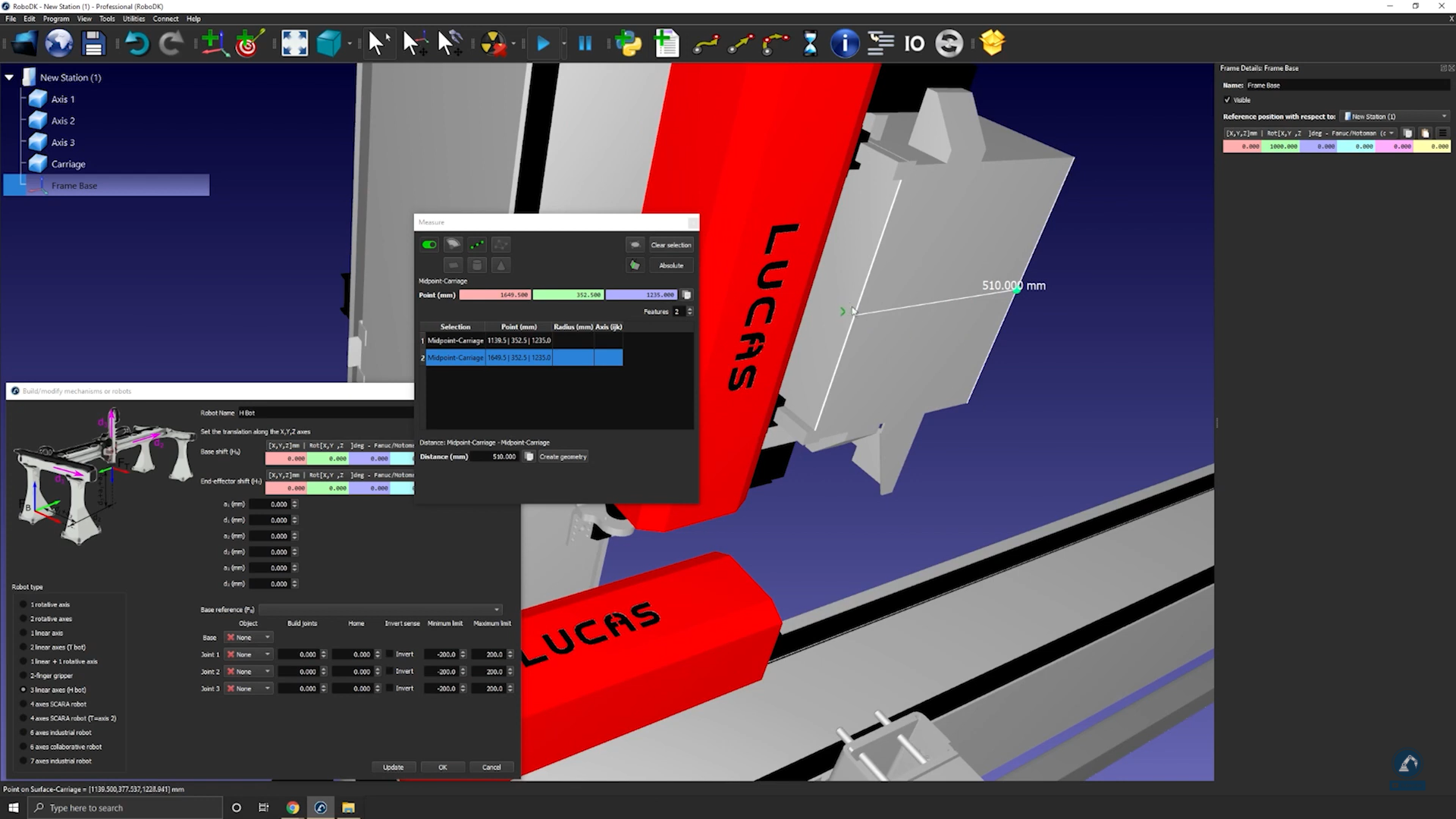
10.Selecione Criar geometria para criar uma linha entre os dois pontos centrais.
11.Agora que a linha entre os dois pontos foi criada, você pode selecionar Limpar Seleção.
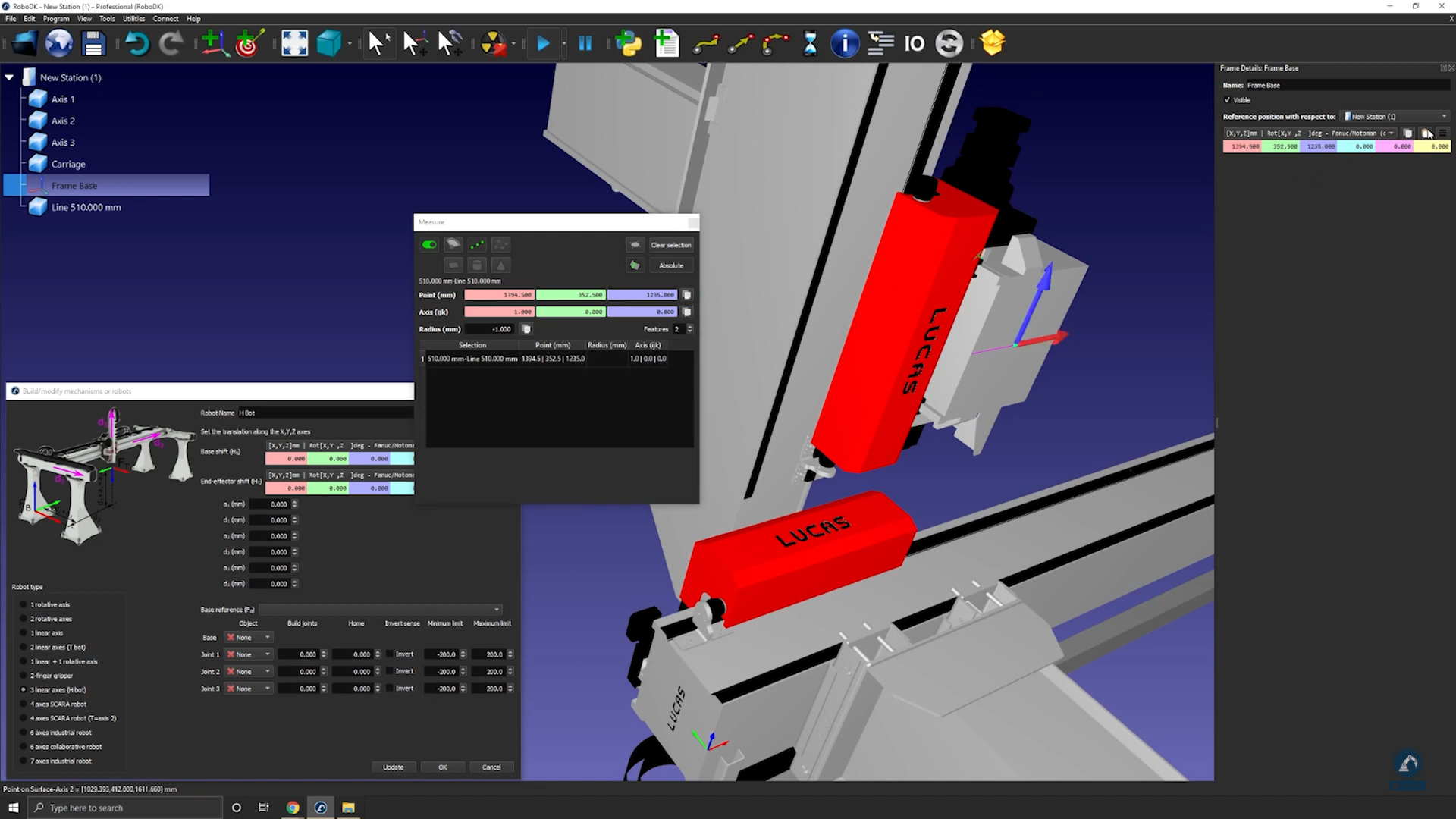
12.Selecione o centro da linha para encontrar a medida do ponto central da linha recém-criada.
13.Copie os valores e cole-os como a posição do quadro (conforme mostrado na imagem abaixo) para garantir que a posição do quadro corresponda à imagem de referência.
Siga estas etapas para garantir que as orientações sejam as mesmas:
14.Gire 90 graus no sentido anti-horário.
15.Selecione Frame Base e, em seguida, selecione os modelos 3D dos trilhos (selecione cada seção, uma a uma), conforme mostrado na imagem abaixo.
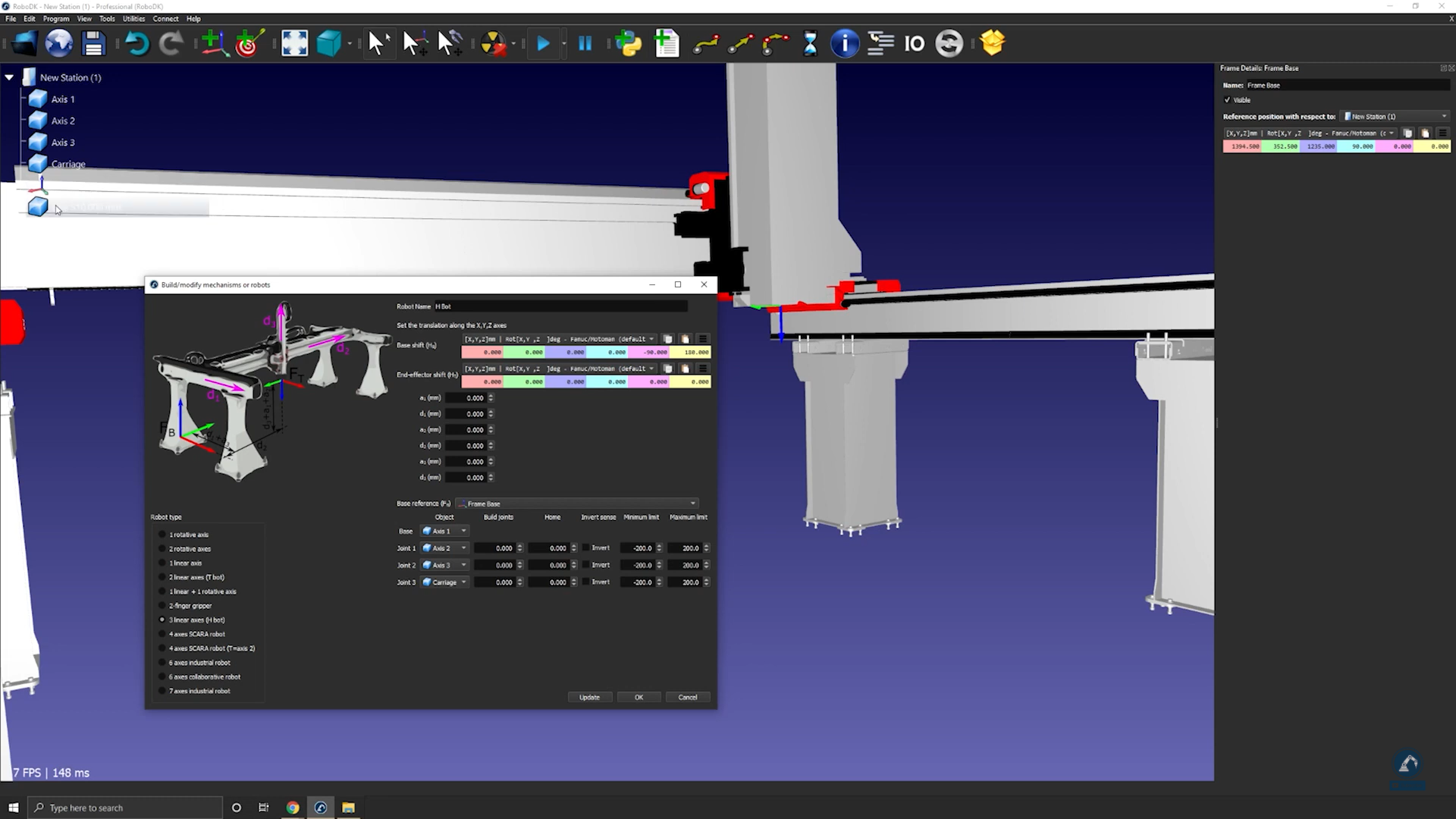
16.Digite o comprimento de cada trilho na seção de medidas.
17.Mova cado eixo em Mover eixos para garantir que cado eixo esteja se movendo bem.
18.Pressione Atualizar depois de testar cado eixo para criar o robô.
19.Se estiver satisfeito com os resultados, você pode pressionar Ok na janela do mecanismo do modelo.
Como modelar uma garra paralela de dois dedos
Você pode modelar uma garra paralela no RoboDK usando a ferramenta Modelar Mecanismo ou Robô. As garras paralelas também são chamadas de garras de dois dedos e permitem que um robô agarre peças.
Siga estas etapas para configurar seu modelo 3D no RoboDK:
1.Importe seu modelo 3D: Arraste e solte seu arquivo STEP para carregá-lo em sua estação (arquivos IGES ou STL também funcionam).
2.Abra o construtor de mecanismos: Utilitários ➔ Modelar mecanismo ou Robô.
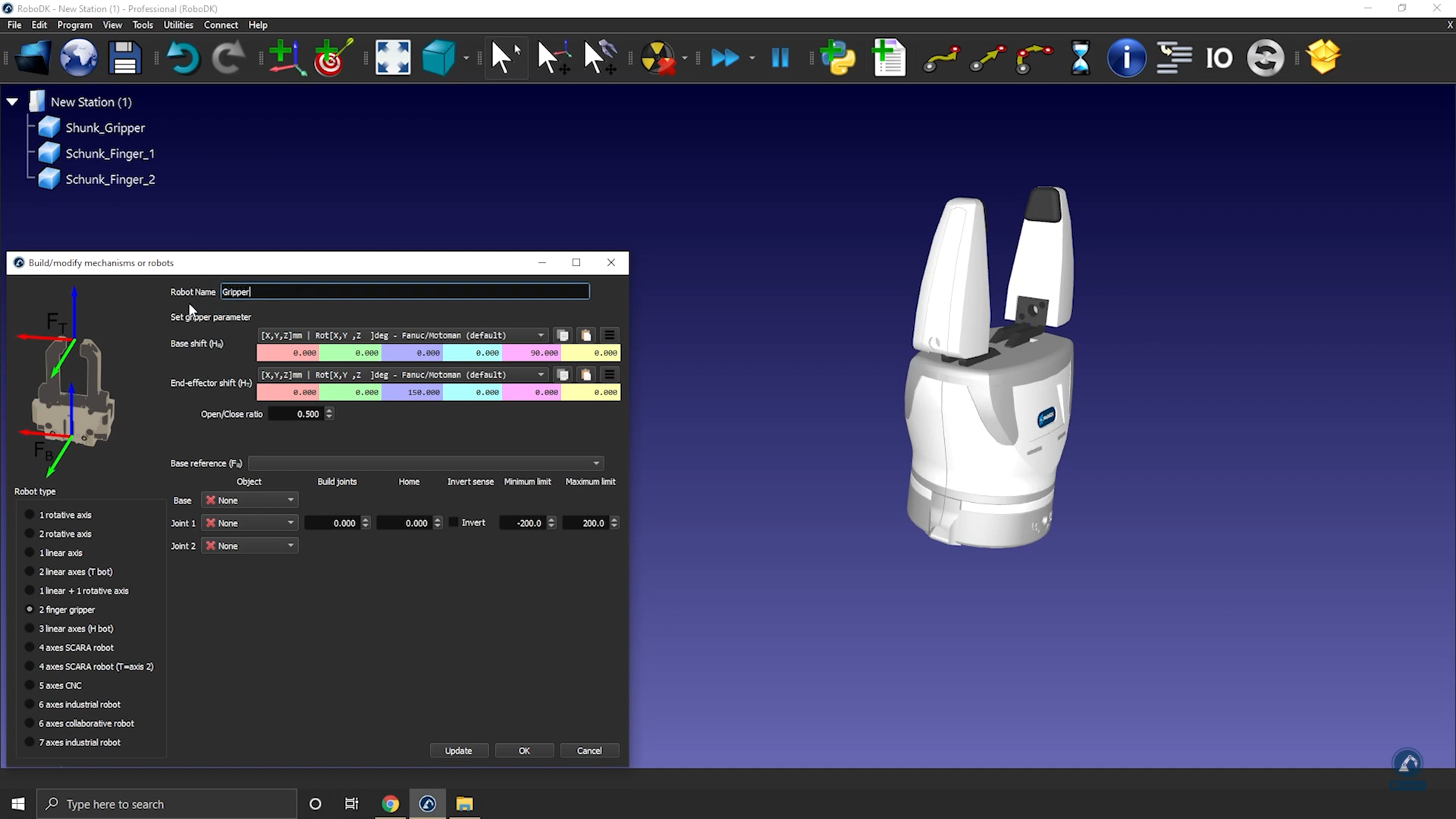
3.Selecione Garra de 2 dedos em "Tipo de robô".
4.Você pode renomear seu mecanismo como "Garra".
Siga estas etapas para posicionar sua estrutura de base:
5.Crie um frame de referência (ele deve estar abaixo da garra) e renomeie-o como Frame Base.
6.Certifique-se de que o quadro que você acabou de criar esteja posicionado de acordo com a imagem: Traga o frame de referência para 0,000 mm (X,Y,Z).
7.Digite a amplitude de movimento da garra: Se Você colocar os dedos na posição 0, o limite mínimo será 0 e o limite máximo será 80.
8.Selecione Atualizar.
9.Verifique se ele se move na direção correta e se os limites estão corretos usando o Mover eixos.
10.Se estiver satisfeito com os resultados, você pode pressionar Ok
Como modelar um braço robótico de seis eixos
Este exemplo mostra como modelar um braço de robô industrial de 6 eixos a partir do zero, usando os modelos 3D fornecidos pelo fabricante.
Siga estas etapas para reunir algumas informações sobre seu robô:
1.Em primeiro lugar, você precisa dos modelos 3D (como arquivos STEP ou IGES).
2.Você também precisará da folha de dados ou do manual do robô.
Siga estas etapas no RoboDK para abrir a janela do modelo do robô:
3.Selecione Utilitários➔ Modelar Mecanismo ou Robô.
4.Em Tipo de robô, selecione Robô industrial de 6 eixos.
Carregue os arquivos 3D do seu robô no RoboDK fazendo o seguinte:
5.Arraste e solte seu robô no RoboDK ou selecione o arquivo e abra-o (pode levar alguns segundos para carregar).
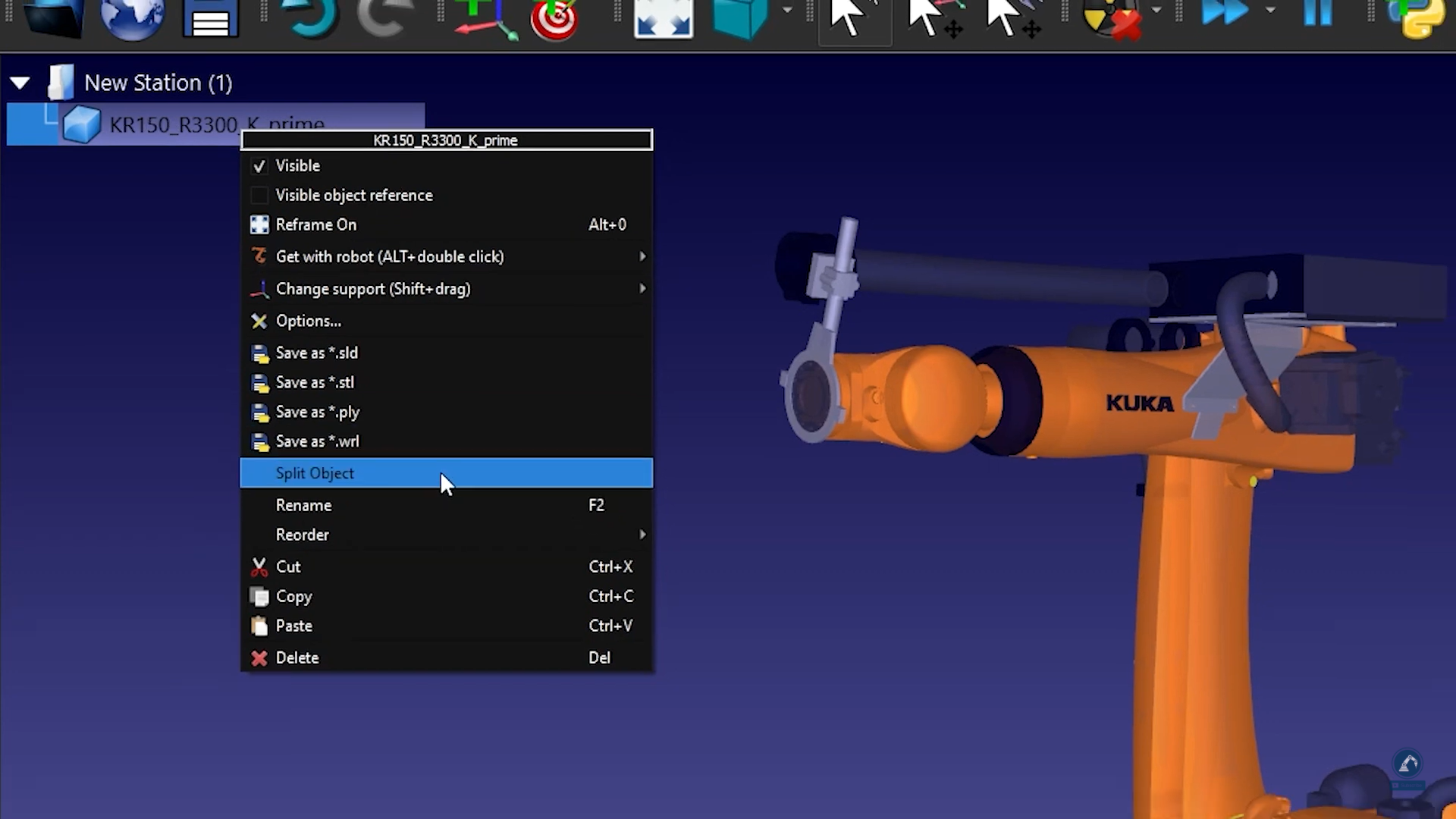
Siga estas etapas para dividir um objeto em diferentes partes para que possamos tratar cada parte separadamente:
6.Se o arquivo CAD que você baixou estiver em um único objeto, é possível desagrupar o objeto (arquivo STEP) clicando com o botão direito do mouse em qualquer objeto e selecionando Separar Objeto.
7.Em seguida, você pode reagrupá-las para criar as diferentes peças do robô.
Siga estas etapas para inserir as informações cinemáticas do robô no RoboDK:
8.Dê um nome ao seu robô inserindo-o em Nome do Robô.
9.Se as peças do seu robô estiverem na ordem correta, todos os modelos 3D deverão ser preenchidos corretamente. Caso contrário, você pode vincular manualmente cada objeto à articulação correta do robô.
10.Preencha as dimensões do robô abrindo a folha de dados.
11.No esboço 3D da folha de dados, você encontrará todos os valores que está procurando. Preencha os valores corretos no RoboDK.
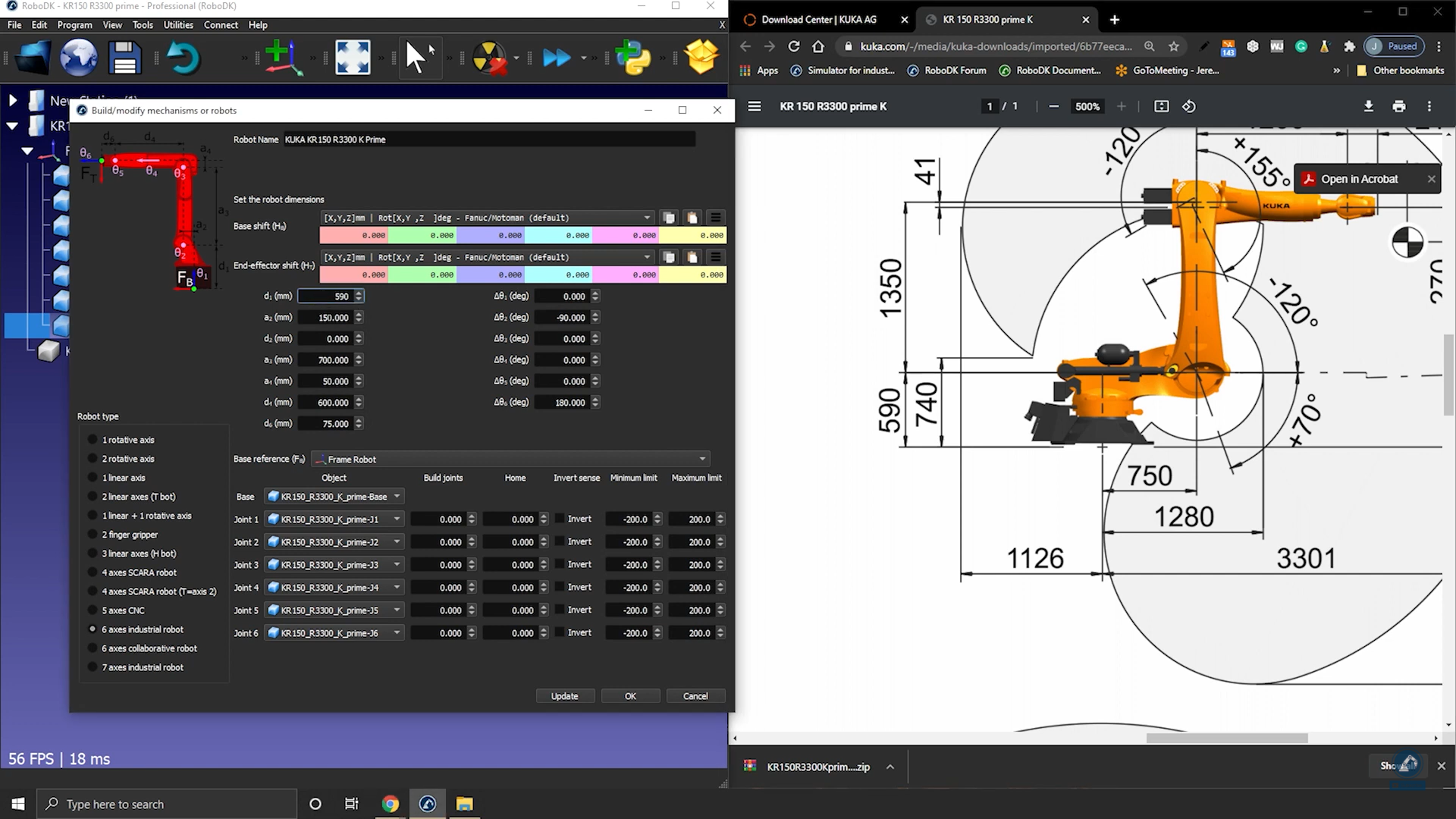
12.Quando Você estiver satisfeito com o resultado da cinemática do robô, selecione Atualizar.
Como acoplar eixos de robôs
Alguns robôs têm duas articulações acopladas, o que significa que dois dos valores de eixo do robô são dependentes. Por exemplo, os robôs Fanuc têm o eixo 2 e o eixo 3 acoplados.
Siga estas etapas para acoplar as articulações de seu robô no RoboDK:
1.Primeiro, clique duas vezes no robô para abrir o painel do robô.
2.Clique em Parâmetros para abrir a guia Parâmetros do robô
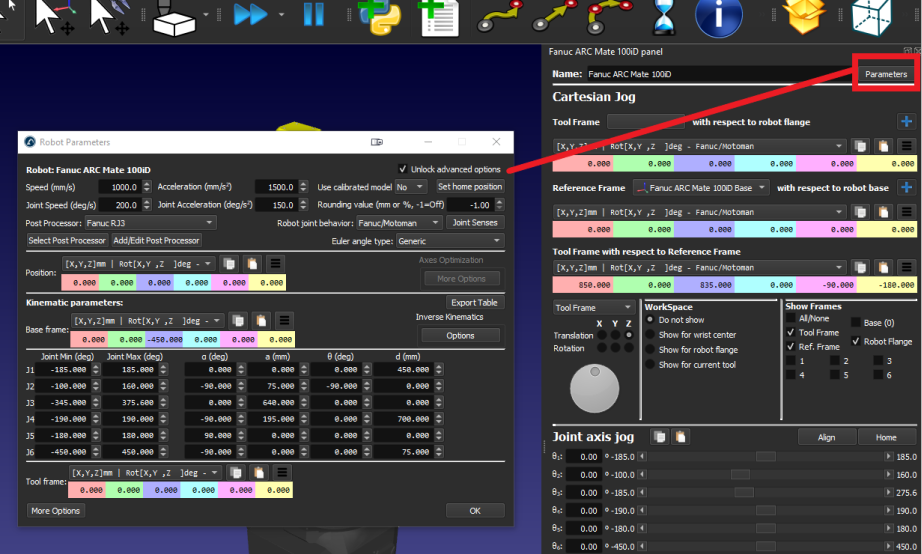
3.Marque a caixa Desbloquear opções avançadas.
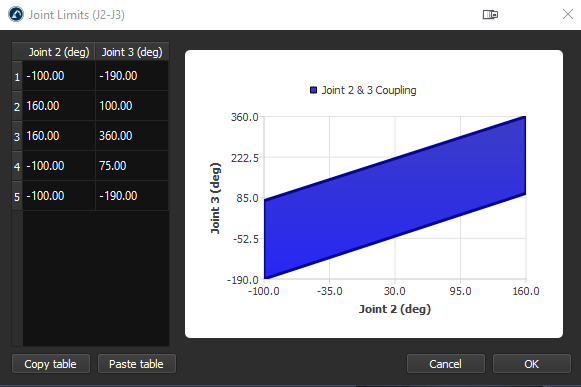
Clique em Sentidos da articulação para abrir a guia Sentido do eixo da articulação. Os primeiros 6 valores representam a direção de giro das articulações e o último valor é o acoplamento das articulações 2 e 3. Altere o 7º valor para -1 para vincular as articulações. Uma nova guia com o polígono de limite do eixo de acoplamento será aberta; você pode editar os limites para evitar que o robô colida consigo mesmo.