A ferramenta do robô, ou o ponto central da ferramenta (TCP), é o ponto usado para mover o robô para uma posição cartesiana (como um ponto cartesiano com valores XYZWPR). O TCP é definido como uma transformação do flange do robô. Definir o TCP corretamente é importante em qualquer aplicação de robô, quer envolva programação off-line ou não.
Siga estas etapas para definir ou calibrar uma ferramenta do robô (Tool Center Point, ou TCP):
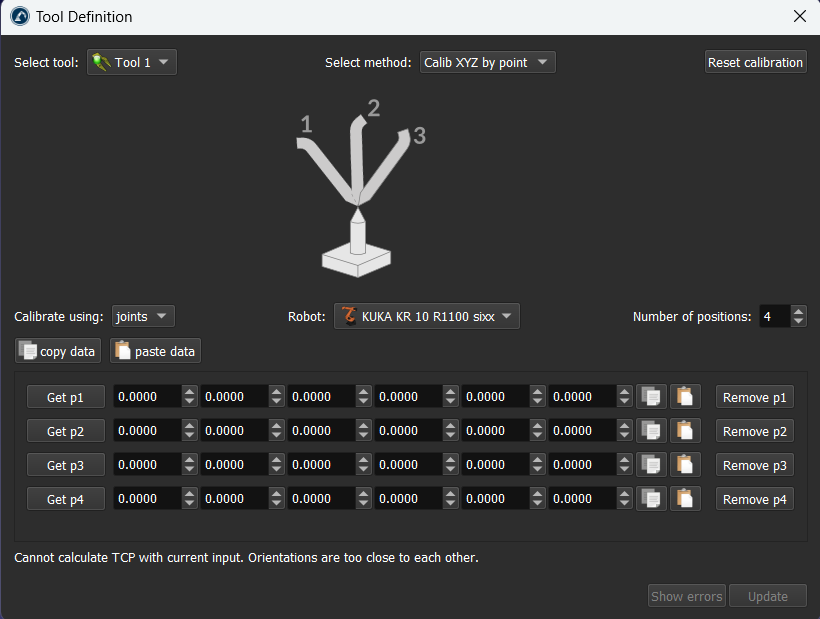
1.Selecione Utilitários ➔ Definir Frame da Ferramenta (TCP)
2.Selecione a ferramenta para definir/calibrar. Como alternativa, clique com o botão direito do mouse em uma ferramenta e selecione Definir TCP.
3.Selecione o método:
a.Tocar um ponto com a ponta do TCP, usando diferentes orientações da ferramenta (Calib XYZ por ponto)
b.Você pode tocar em um plano com o TCP, usando diferentes orientações da ferramenta (Calib XYZ por plano). O TCP pode ser um ponto ou uma esfera.
Observação: Tocar o mesmo ponto usando orientações diferentes (primeiro método) é o mesmo método que a maioria dos controladores de robôs tem disponível no terminal de programação. Use o RoboDK para ter uma ideia melhor dos erros do TCP.
Observação: Se o centro de uma esfera precisar ser calculado, é recomendável usar um plano para definir o TCP. Esse método recupera automaticamente o centro do apalpador.
4.A calibração do TCP usando valores de eixos é a configuração padrão. Altere-a para poses se você tiver os pontos cartesianos.
Importante: Se o TCP for definido usando poses, a posição do flange do robô deve ser fornecida como uma pose (posição e orientação), com relação à base do robô ou a um frame de referência. Para obter mais informações sobre como fornecer esses valores, consulte a seção Frames de Referência.
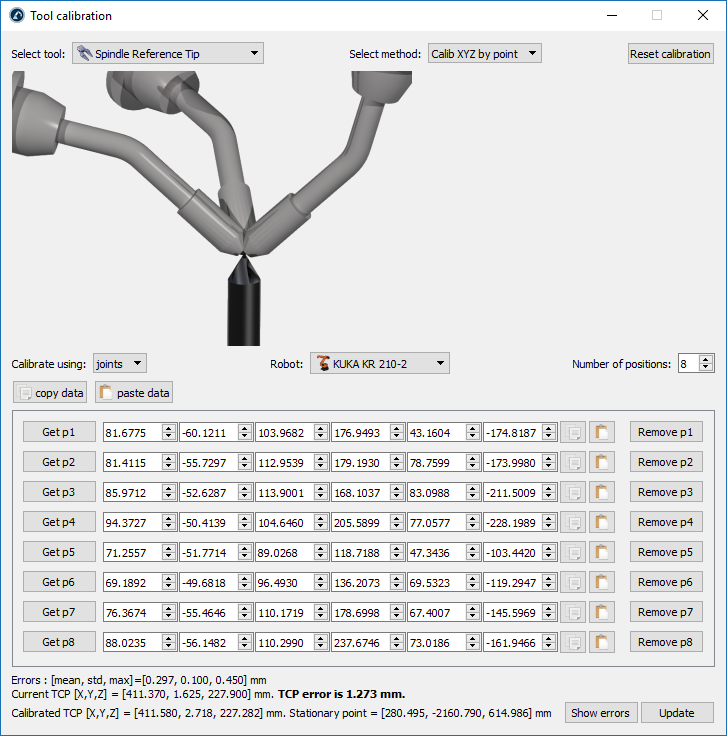
Dica: é possível usar mais de 3 ou 4 configurações para definir ou calibrar adequadamente o TCP. Isso permite obter um resultado mais preciso e fornece uma boa estimativa do erro do TCP. Recomenda-se usar 8 pontos ou mais para definir um TCP com precisão, ou 3 pontos se a precisão não for importante.
5.Selecione o robô se houver mais de um robô disponível em seu projeto.
6.Ajuste o número de pontos que você gostaria de usar para calibrar o TCP. Esse valor também pode ser modificado posteriormente.
7.Comece a preencher a tabela com as configurações medidas (valores de eixo ou posição e orientação do flange).
8.Finalmente, selecione Atualizar para aplicar a nova ferramenta de posição selecionada na Estação RoboDK.
Vídeo: Este vídeo mostra como Você pode calibrar corretamente a ferramenta do robô (TCP) usando um robô Omron TM: https://www.youtube.com/watch?v=TM-9vGR2r4k&list=PLjiA6TvRACQd8Zju_r_VSL7LBNEmBE57E&index=2.
Dica: A lista de configurações pode ser preenchida manualmente ou usando os botões copiar/colar (à direita de cada linha).
Importante: Recomenda-se fornecer cada valor de eixo com pelo menos 4 casas decimais (ao fornecer valores de eixo). O número permitido de valores decimais pode ser alterado em Ferramentas ➔ Opções ➔ Precisão ➔ Decimais Max.
Dica: Também é possível selecionar Obter p1 para obter os valores atuais dos eixos do robô real para o RoboDK. Se o driver do robô tiver sido configurado corretamente, você poderá obter facilmente essa posição no PC. Mais informações estão disponíveis na seção Driver de Robôs.
Importante: Recomenda-se manter uma cópia separada dos valores que estão sendo fornecidos. Selecione Copiar dados e Colar dados para copiar/colar todo o conteúdo.
Observação: A nova ferramenta (TCP) é calculada automaticamente depois que os valores são inseridos.
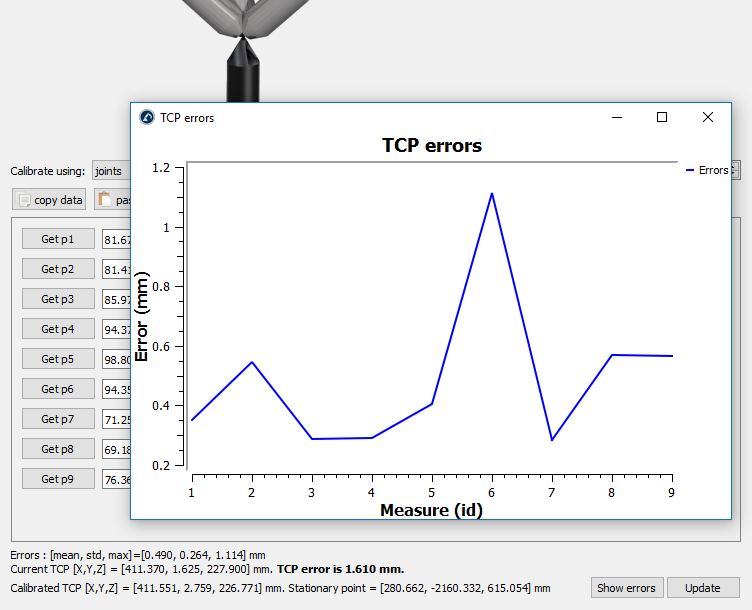
Dica: algumas estatísticas de erro úteis são fornecidas como o erro médio, o desvio padrão (std) e o erro máximo. Selecione Mostrar erros para exibir um gráfico com os erros de cada ponto em relação à média calculada. Como esse método envolve muitas operações manuais, é comum a introdução de erros em pontos específicos. Para isolar esses erros, podemos excluir iterativamente os pontos que mostram um erro maior em comparação com a média.
Como exemplo, a imagem a seguir mostra os erros antes da exclusão do ponto 6, selecionando o botão Remover p6.