Otimizar eixos externos
Quando Você tem um ou mais eixos adicionais sincronizados com o seu robô, pode priorizar a movimentação de determinados eixos e otimizar seus projetos de usinagem de robôs, projetos de seguimento de curvas/pontos e projetos de impressão 3D de acordo com seus critérios preferidos.
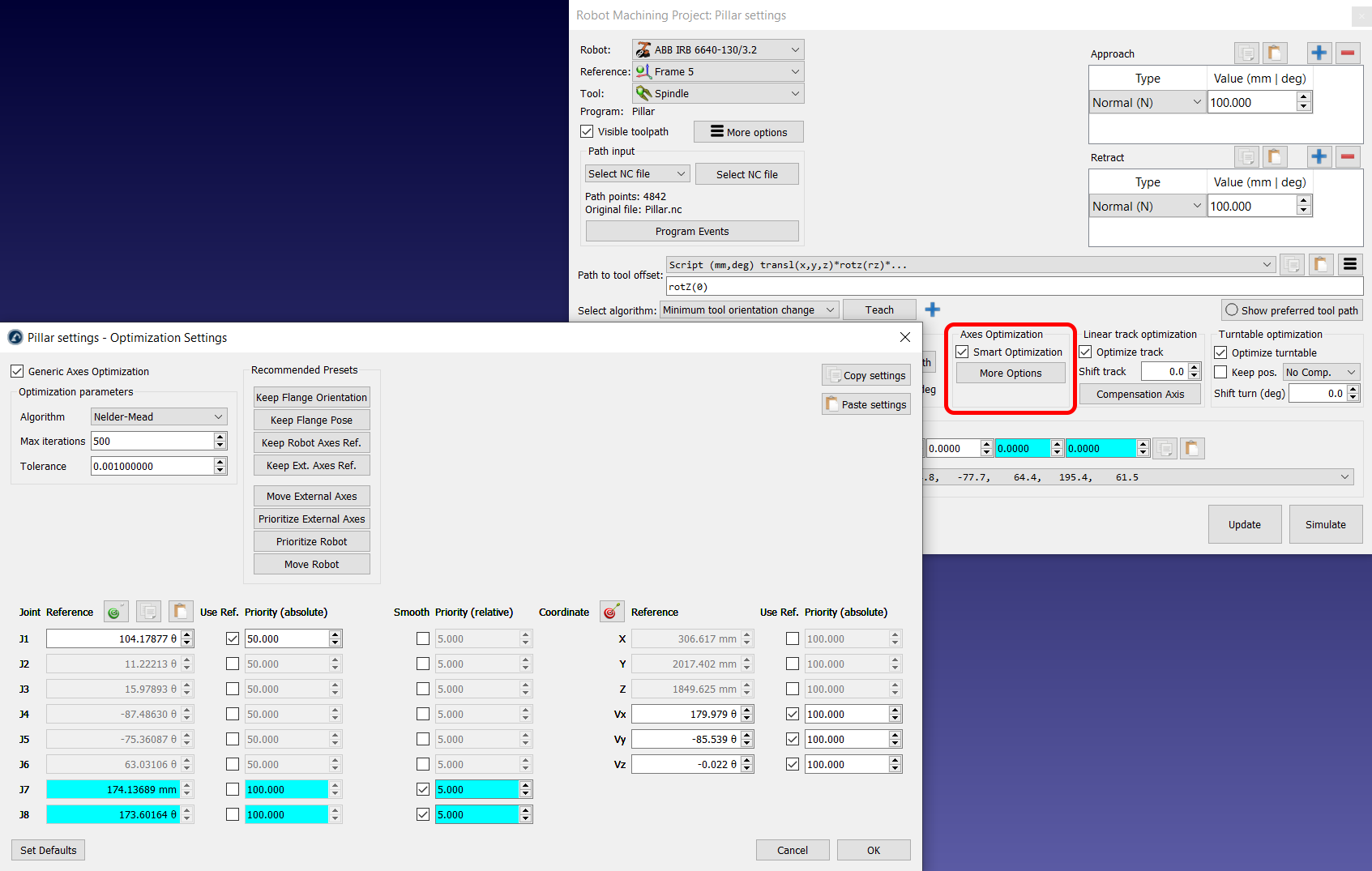
Selecione Mais opções na seção Otimização de eixos do projeto de usinagem do robô para ver as opções de otimização de eixos externos.
Você pode fornecer prioridade diferente de acordo com os seguintes critérios:
●Atualizar eixos de referência: Você pode impor uma posição de eixo desejada para algumas (ou todas) articulações. Um peso maior significa que é mais provável que o valor de referência corresponda a qualquer momento durante o programa.
●Minimizar o movimento (igualar a posição anterior): Você pode impor uma "penalidade" ao movimento abrupto de determinados eixos (movimento relativo).
●Manter pose de referência: Você pode impor uma pose absoluta desejada para o robô manter. A pose de referência é a pose do flange do robô que você deseja manter em relação à base estática do robô. A restrição de orientação tentará combinar os vetores X, Y e Z da pose do flange do robô de acordo com a pose de referência.
Por exemplo, se você selecionar a predefinição Manter Orientação da Flange, o RoboDK priorizará a manutenção da orientação do flange do robô para corresponder à pose do robô que você tinha na simulação quando selecionou essa predefinição (a seleção dessa predefinição atualiza a pose de referência). Além disso, se você quiser que o valor da articulação 1 do robô permaneça próximo a 105 graus, poderá ativar essa prioridade.
Se Você selecionar a predefinição Manter Referência do Robô, verá que a referência de posição é atualizada para corresponder à posição atual dos eixos do robô. Você também verá que os valores de eixo do robô têm um determinado peso (100), enquanto os eixos externos não têm peso (sem preferência). Por outro lado, os eixos externos terão um peso pequeno (5) para evitar que façam movimentos bruscos ou indesejados.
Você pode alterar essas configurações para obter o efeito desejado depois de atualizar o projeto de usinagem do robô.