Sincronizar eixos adicionais
É possível sincronizar um braço de robô com eixos externos adicionais. Os eixos externos podem ser usados simplesmente como um posicionador ou também podem ser sincronizados com o mesmo controlador do robô. Quando os eixos externos são sincronizados, o robô e os eixos podem se mover ao mesmo tempo, mantendo movimentos lineares precisos em relação a um sistema de coordenadas.
Você pode sincronizar até 6 eixos adicionais com qualquer robô usando o RoboDK. Se Você estiver usando um robô de 6 eixos, isso significa que pode ter um sistema combinado com 12 eixos.
Para sincronizar um braço de robô com eixos externos:
1.Carregue seu eixo adicional de nossa biblioteca ou modele-o como um novo mecanismo.
2.Construa uma estação RoboDK colocando o robô e os eixos/mecanismos em seus respectivos locais.
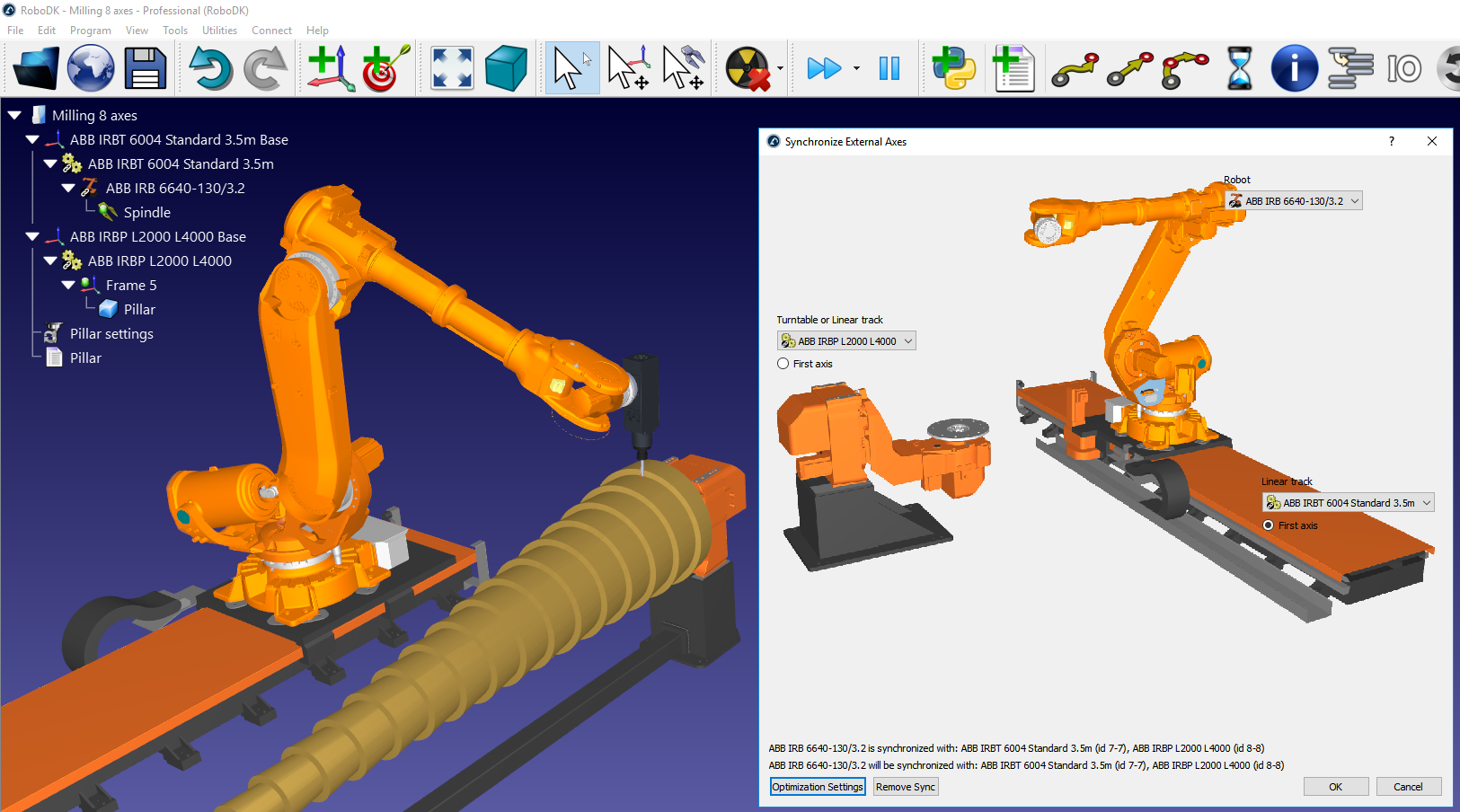
3.Selecione Utilitários ➔ Sincronizar eixos externos.
4.Selecione o robô e a plataforma giratória e/ou o trilho linear disponíveis estarão disponíveis para sincronização com o robô.
5.Selecione OK. Um novo painel do robô será aberto, mostrando os eixos adicionais em azul.
Os pontos relacionados a esse robô sincronizado mostrarão valores adicionais de articulação em azul. É possível especificar a posição preferencial de um posicionador quando um programa é gerado. Os pontos cartesianos manterão a posição cartesiana fornecida enquanto os eixos externos são movidos ao longo do caminho.
Todas as configurações de usinagem do robô mostrarão opções adicionais para fornecer a posição preferencial dos eixos externos. Além disso, cada movimento exportado pelo pós-processador incluirá a posição dos eixos externos.