Dicas gerais
Esta seção aborda dicas gerais para definir suas ferramentas, sistemas de coordenadas e importação de modelos 3D no RoboDK para construir seu projeto no RoboDK.
Esta seção aborda os seguintes tópicos:
●Como calibrar uma ferramenta (TCP)
●Como calibrar uma frame de referência
●Dicas de importação de arquivos STEP ou IGES
●Como alterar a velocidade da simulação
●Como calcular o tempo de ciclo de um programa
Definir uma ferramenta (TCP)
A ferramenta do robô, ou o ponto central da ferramenta (TCP), é o ponto usado para mover o robô para uma posição cartesiana (como um ponto cartesiano com valores XYZWPR). O TCP é definido como uma transformação do flange do robô. Definir o TCP corretamente é importante em qualquer aplicação de robô, quer envolva programação off-line ou não.
Siga estas etapas para definir ou calibrar uma ferramenta do robô (Tool Center Point, ou TCP):
1.Selecione Utilitários ➔
2.Selecione a ferramenta para definir/calibrar.
Como alternativa, clique com o botão direito do mouse em uma ferramenta e selecione
3.Selecione o método:
a.Tocar um ponto com a ponta do TCP, usando diferentes orientações da ferramenta (Calib XYZ por ponto)
b.Você pode tocar em um plano com o TCP, usando diferentes orientações da ferramenta (Calib XYZ por plano). O TCP pode ser um ponto ou uma esfera.
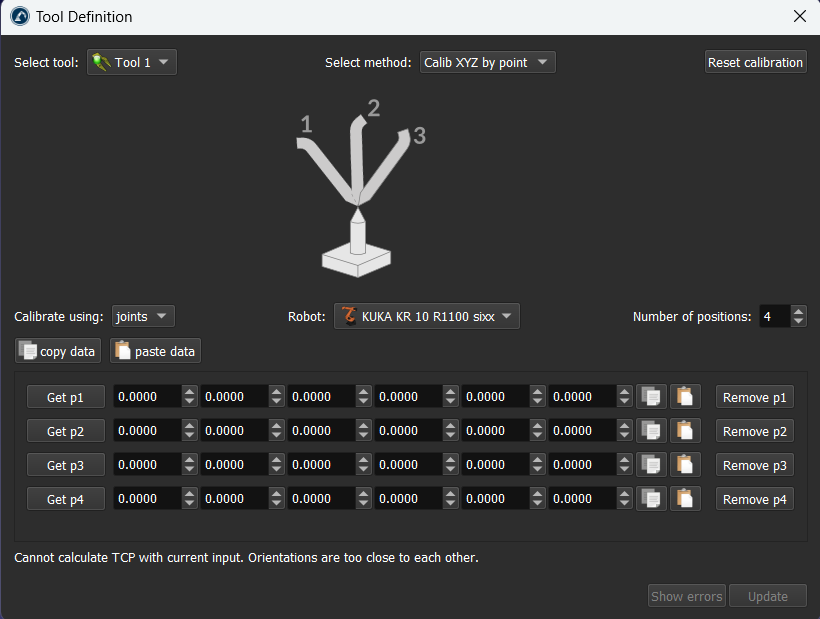
4.A calibração do TCP usando valores de eixos é a configuração padrão. Altere-a para poses se você tiver os pontos cartesianos.
5.Selecione o robô se houver mais de um robô disponível em seu projeto.
6.Ajuste o número de pontos que você gostaria de usar para calibrar o TCP. Esse valor também pode ser modificado posteriormente.
7.Comece a preencher a tabela com as configurações medidas (valores de eixo ou posição e orientação do flange).
8.Finalmente, selecione Atualizar para aplicar a nova ferramenta de posição selecionada na Estação RoboDK.
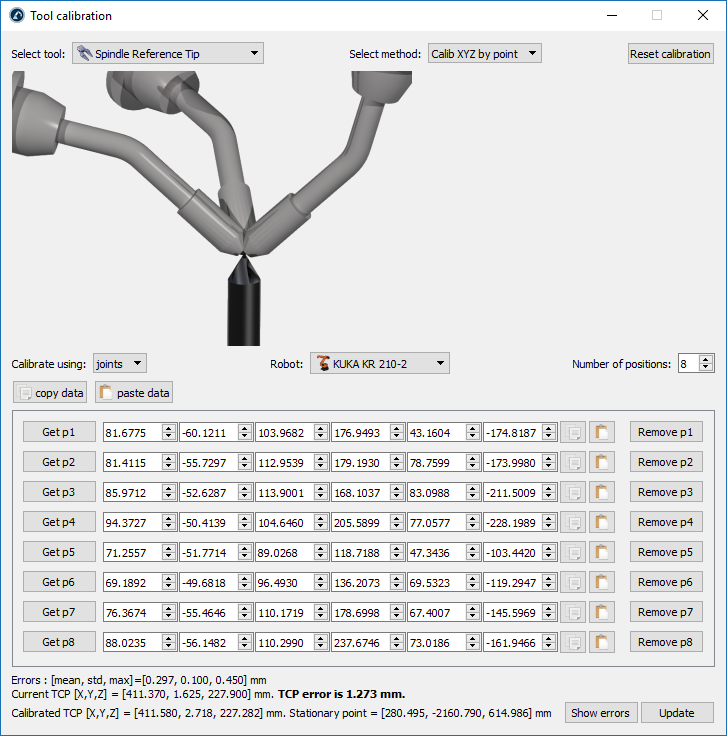
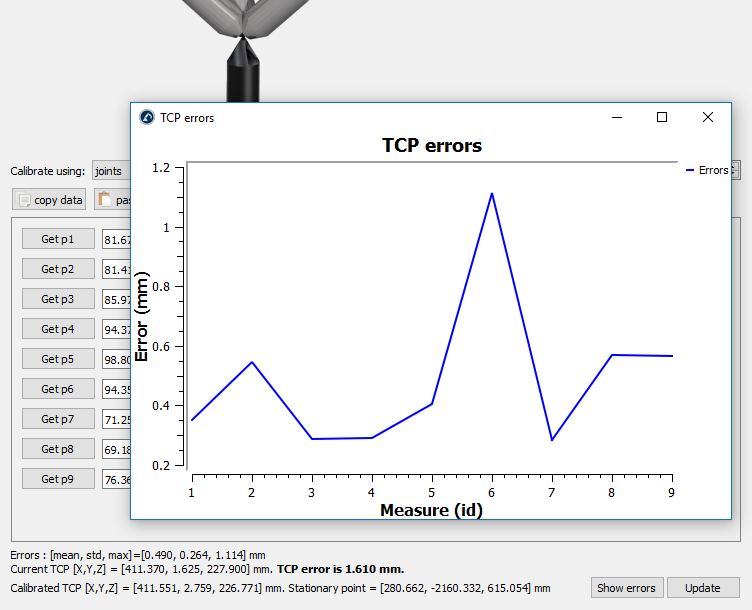
Como exemplo, a imagem a seguir mostra os erros antes da exclusão do ponto 6, selecionando o botão Remover p6.
Definir um frame de referência
Um frame de referência define a posição de um objeto em relação a um robô (posição e orientação). Recomenda-se marcar os pontos em relação a uma referência que você possa definir com o robô. Um frame de referência permite que você ajuste ou mova seus programas para locais diferentes sem precisar marcar novamente todos os pontos.
Mais informações sobre Frames de referência estão disponíveis na seção Introdução.
A definição de um frame de referência requer a sondagem de alguns pontos usando uma ferramenta de robô (os valores dos eixos precisam ser recuperados em locais específicos).
Siga estas etapas para identificar um frame de referência com relação ao robô:
1.Selecione Utilitários ➔ 
2.Selecione o Frame de Referência para definir/calibrar.
Como alternativa, clique com o botão direito do mouse em um frame de referência e selecione
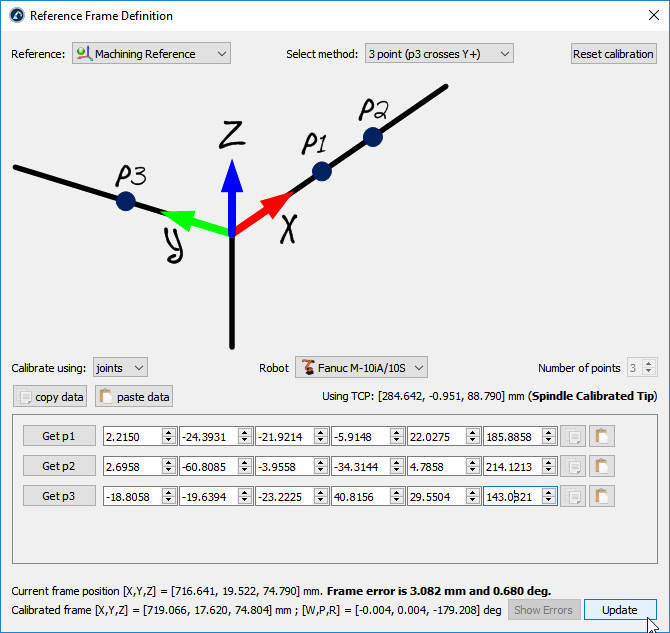
3.Selecione o método:
a.Método de 3 pontos (com o 3° ponto cruzando o eixo Y+)
b.Método de 3 pontos (com o ponto 1st sendo a origem do frame de referência)
c.6 pontos
d.A opção Calibração de plataforma giratória permite localizar a frame de referência em uma plataforma giratória, com o eixo da plataforma giratória devidamente alinhado
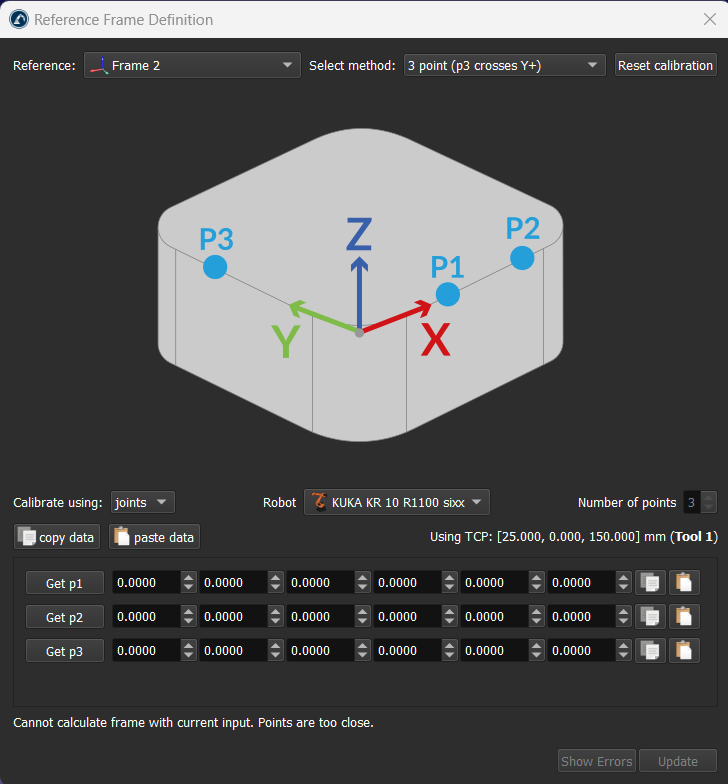
4.Os valores de eixo são usados como configuração padrão. Altere-a para pontos se você tiver a posição XYZ de cada ponto em relação à estrutura de base do robô.
5.Selecione o robô se houver mais de um robô disponível.
6.Comece a preencher a tabela com os pontos medidos (valores de eixo ou pontos).
7.Finalmente, selecione Atualizar para aplicar a nova posição ao frame de referência selecionado na Estação RoboDK.
Alinhar o objeto com a referência
Esta seção explica como o frame de referência (sistema de coordenadas) de um objeto pode ser alinhado em relação à sua própria geometria. Esta seção permite mover o frame de referência de um objeto para um local que possa ser identificado em uma configuração real.
Siga estas etapas para alinhar virtualmente o frame de referência de um objeto de acordo com pontos específicos da geometria do objeto:
1.Carregar o objeto
2.Selecione a estação ativa 
3.Selecione Programs ➔ 
Certifique-se de que o frame de referência esteja diretamente conectado à raiz da estação (e não a outros Frames de referência).
4.Clique com o botão direito do mouse no frame de referência e selecione
O procedimento é muito semelhante ao da seção anterior. A principal diferença é que devemos selecionar os pontos do objeto virtual em vez do objeto real.
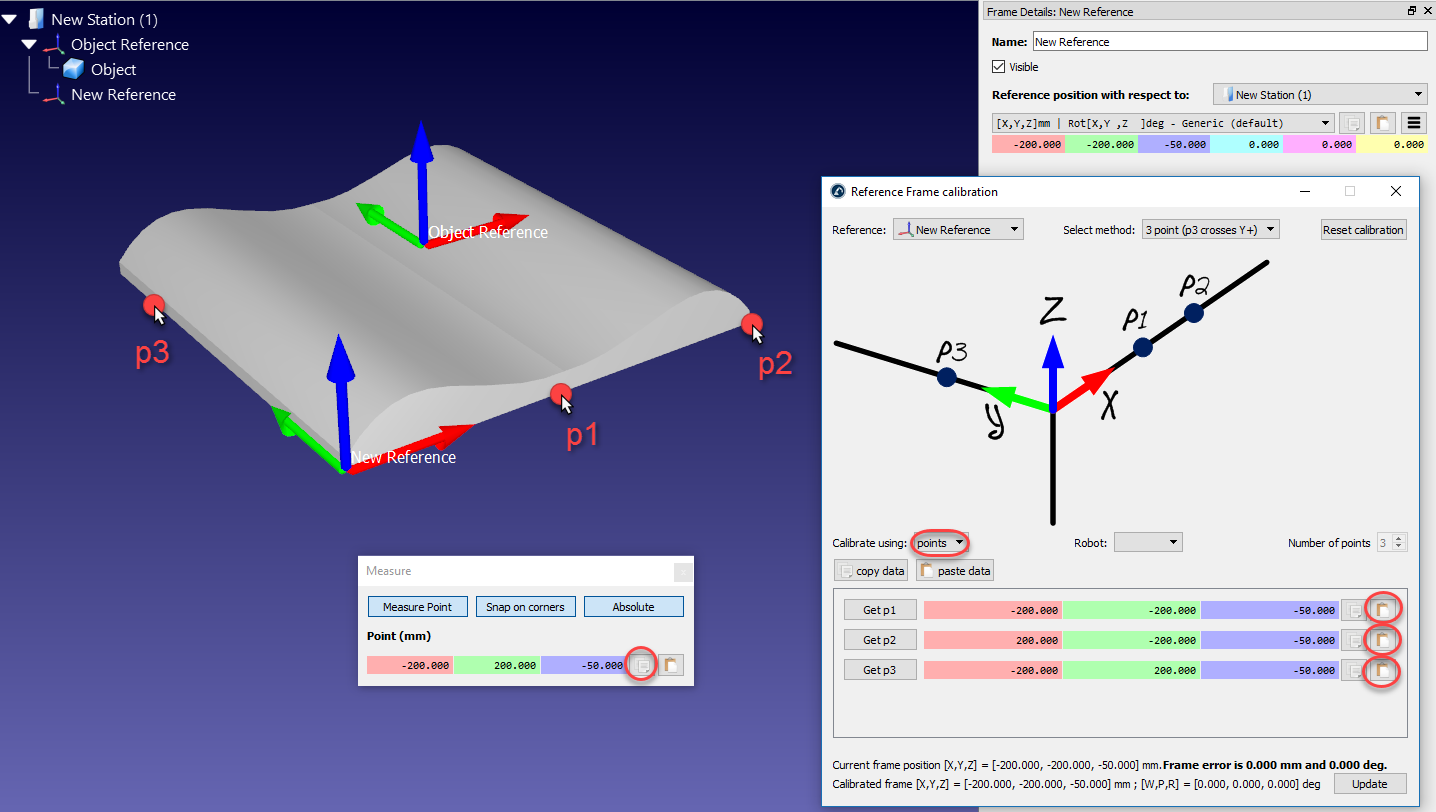
5.Selecione o método de calibração desejado.
Por exemplo: O método de 3 pontos (com o terceiro ponto cruzando o eixo Y+).
6.Selecione Calibrar usando pontos
7.Selecione Ferramentas ➔ Medição para abrir a Ferramenta de medição
8.Selecione o botão Absoluto na Ferramenta de medição para que os pontos sejam medidos em relação à estação (referência absoluta)
9.Selecione os 3 pontos no objeto virtual (um por um) e insira-os na janela Calibração do frame de referência
10.Selecione Atualizar. O frame de referência deve aparecer no local desejado.
11.Clique com o botão direito do mouse no objeto e selecione Alterar suporte. Em seguida, selecione o novo frame de referência. A posição absoluta do objeto não será alterada. Entretanto, a posição relativa do objeto com relação ao novo frame de referência será definida corretamente.
12.O objeto e sua própria referência estão prontos para a programação off-line: Arraste e solte o novo frame de referência para o frame de referência do robô.
Alinhar referências de robôs
Esta seção explica como dois ou mais robôs podem ser programados off-line enquanto compartilham um frame de referência comum.
Em uma aplicação típica de programação off-line, a posição do objeto é atualizada em relação ao robô. Entretanto, quando dois ou mais robôs são usados para a mesma aplicação, a posição de cada robô deve ser atualizada em relação a uma referência comum (um objeto de referência ou um frame de referência comum).
Siga estas etapas para atualizar a posição de dois ou mais robôs em relação a um frame de referência:
1.Certifique-se de que os Frames de referência do robô e o frame de referência do objeto não dependam um do outro. Se houver uma dependência, devemos colocar os Frames de referência anexados ao item da estação.
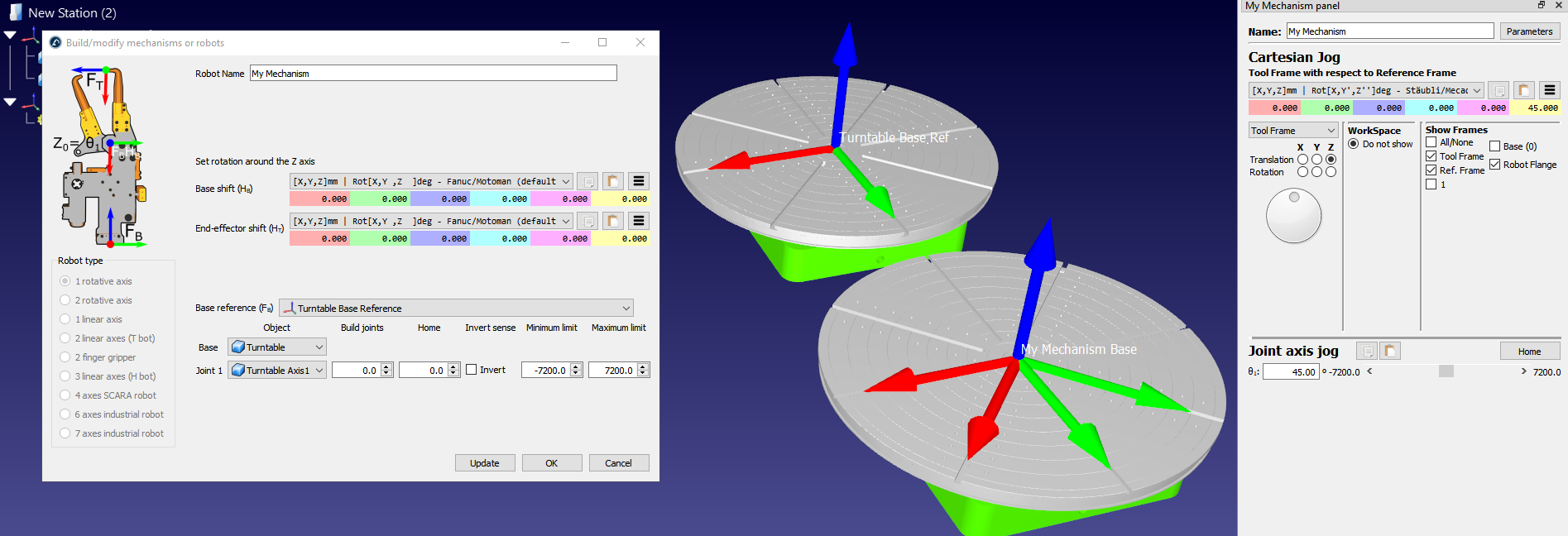
2.Adicione um novo frame de referência anexado a cada um dos quadros de base do robô como se você fosse definir um novo frame de referência individual para cada robô (Real Ref. A e Real Ref. B).
Esse frame de referência representará a localização real da peça em relação a cada robô.
3.Calibre cada um desses Frames de referência (Real Ref. A e Real Ref. B), separadamente, usando o procedimento de Calibração de Referência padrão (método de 3 pontos, por exemplo)
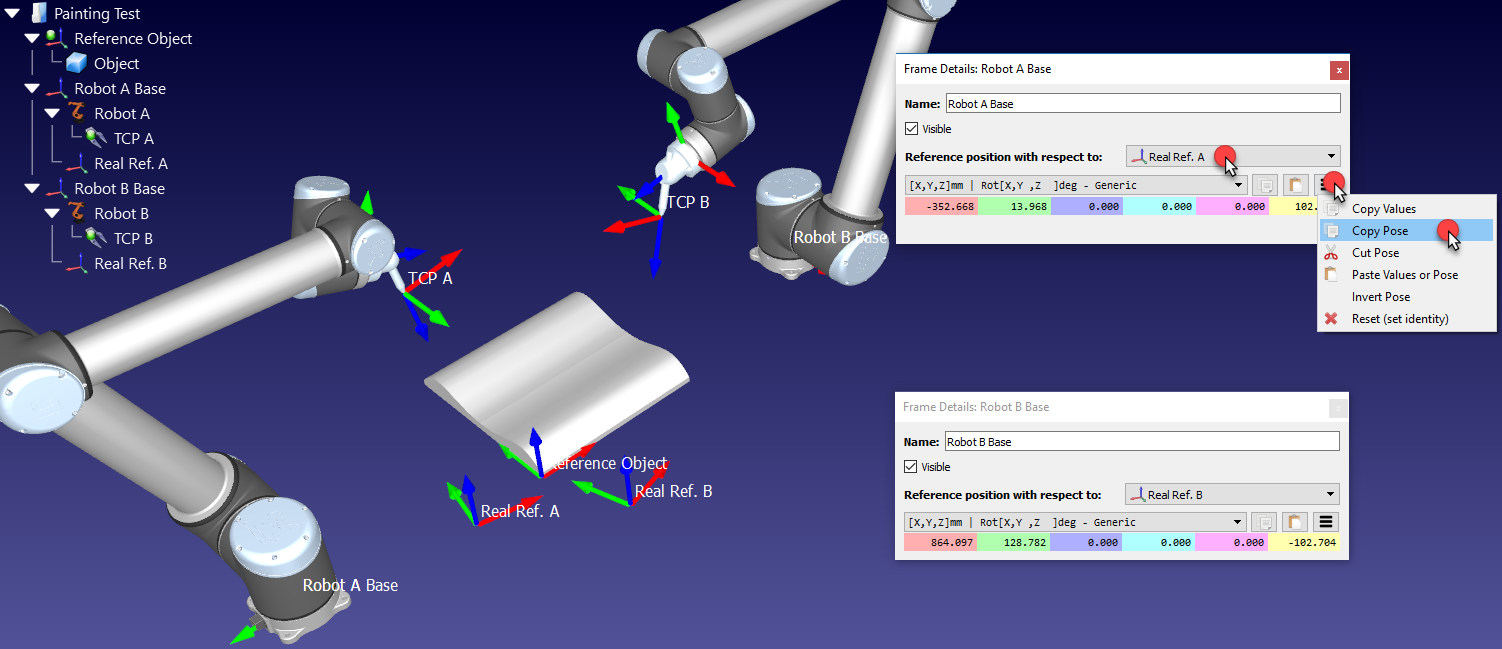
Neste ponto, veremos 3 Frames de referência que deveriam ser coincidentes, mas não são. O frame de referência de cada robô deve ser atualizado para corrigir esse problema:
4.Clique duas vezes em uma das referências do robô, como Robot A Base, para abrir a janela do frame de referência
5.Copie a posição da referência de base do robô em relação à referência calibrada desse robô (Real Ref. A), selecionando o botão de cópia
6.Na mesma janela, altere a posição de referência em relação a (menu suspenso) para o objeto de referência
7.Cole a posição copiada. O robô será movido e o Real Ref. A será coincidente com o quadro do objeto de referência
8.Repita as etapas 4 a 7 deste procedimento para os outros robôs, se houver
Ao final desse procedimento, todos os Frames de referência devem corresponder e a relação entre todas as referências calibradas e o objeto de referência deve ser a mesma.
Calibrar uma plataforma giratória
O utilitário de definição da frame de referência descrito na seção anterior oferece duas maneiras de calibrar a posição de uma plataforma giratória em relação a um robô. A calibração/identificação da plataforma giratória pode ser feita usando o robô com uma ferramenta adequadamente definida ou um sistema de medição (como um laser tracker).
Precisamos recuperar a posição de um ponto na plataforma giratória várias vezes à medida que movemos os eixos da plataforma giratória. Atualmente, oferecemos suporte à calibração de plataformas giratórias de 1 e 2 eixos.
Calibrar uma plataforma giratória de um eixo
Siga este procedimento para calibrar uma plataforma giratória de 1 eixo.
1.Selecione Utilitários ➔
2.Selecione o Frame de Referência para definir/calibrar.
Como alternativa, clique com o botão direito do mouse em um frame de referência e selecione
3.Selecione o método Calibração da plataforma giratória (1 eixo)
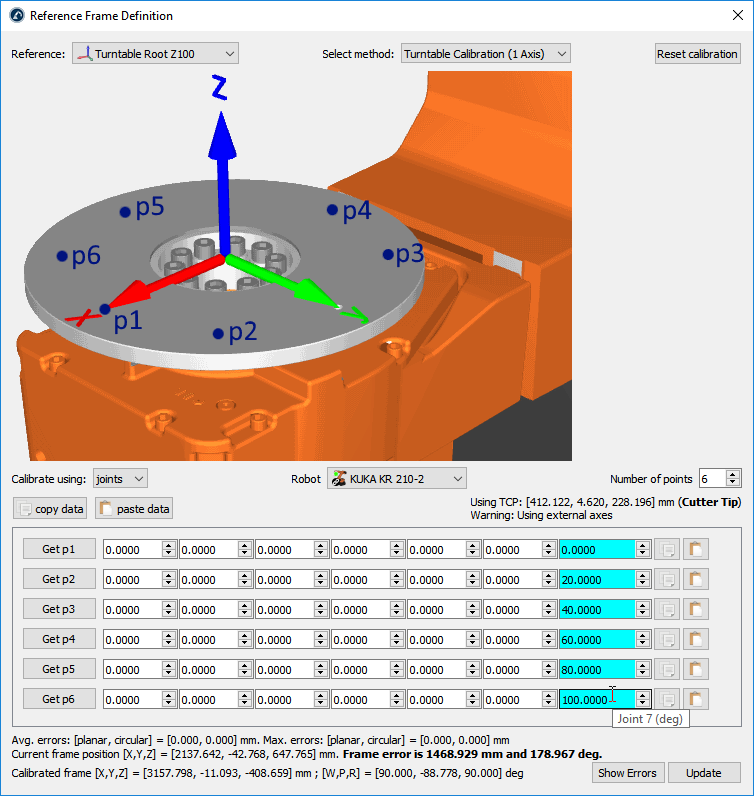
4.Selecione Calibrar usando eixos (configuração padrão). Você pode alterá-la para pontos se tiver a posição XYZ de cada ponto em relação à estrutura de base do robô.
5.Especifique o robô se houver mais de um robô disponível na estação.
6.Selecione o número de pontos que você gostaria de obter (o mínimo exigido é 3).
7.Comece a preencher a tabela com as posições (ou pontos) de articulação do robô.
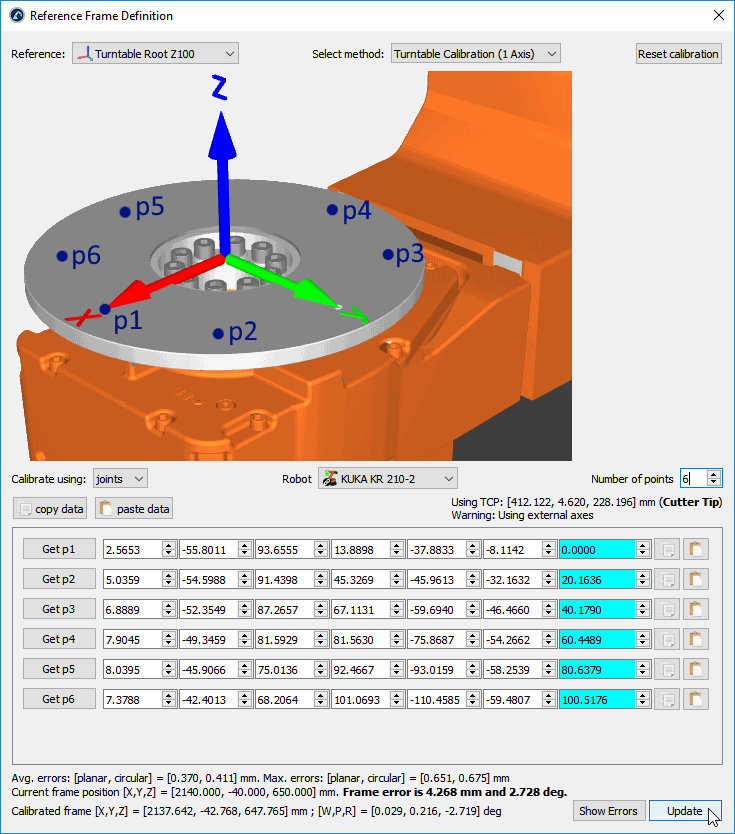
8.Finalmente, selecione Atualizar para aplicar a nova posição ao frame de referência selecionado na Estação RoboDK.
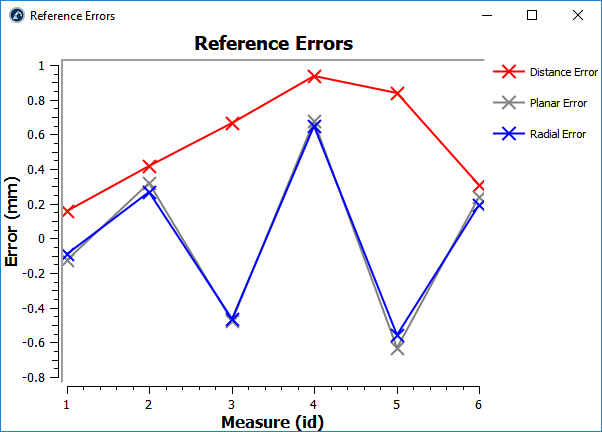
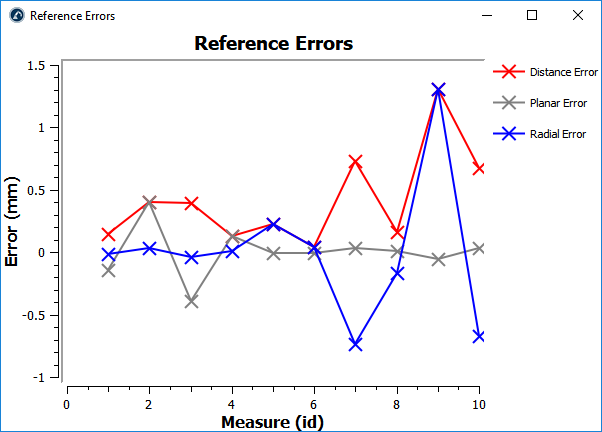
9.Selecione Exibir Erros para exibir o nível de erro em cada ponto (os erros de distância são equivalentes aos erros planares e aos erros radiais combinados)
Calibrar uma plataforma giratória de dois eixos
Siga este procedimento para calibrar uma plataforma giratória de dois eixos.
1.Selecione Utilitários ➔
2.Selecione o Frame de Referência para definir/calibrar.
Como alternativa, clique com o botão direito do mouse em um frame de referência e selecione
3.Selecione o método Calibração da plataforma giratória (2 eixos)
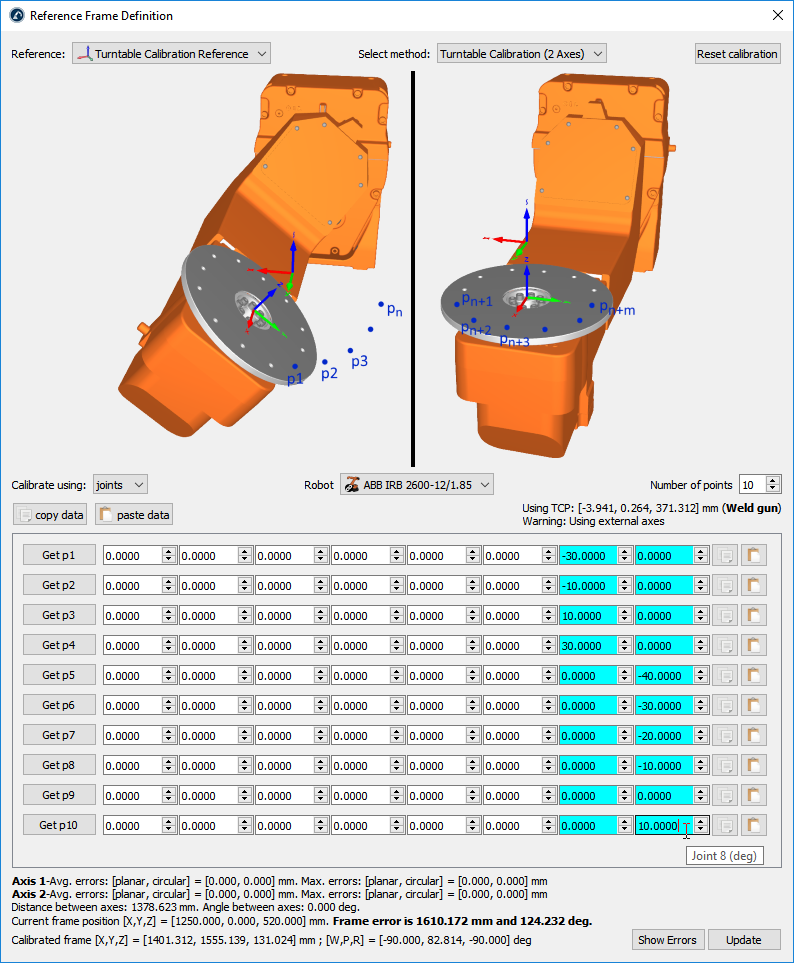
4.Selecione Calibrar usando eixos (configuração padrão). Você pode mudar para pontos (em vez de eixos) se tiver a posição XYZ de cada ponto em relação à estrutura da base do robô.
5.Especifique o robô se houver mais de um robô disponível na estação.
6.Selecione o número de pontos que você gostaria de obter (o mínimo exigido é 6 pontos: 3 pontos para cado eixo).
7.Comece a preencher a tabela com as posições (ou pontos) de articulação do robô.
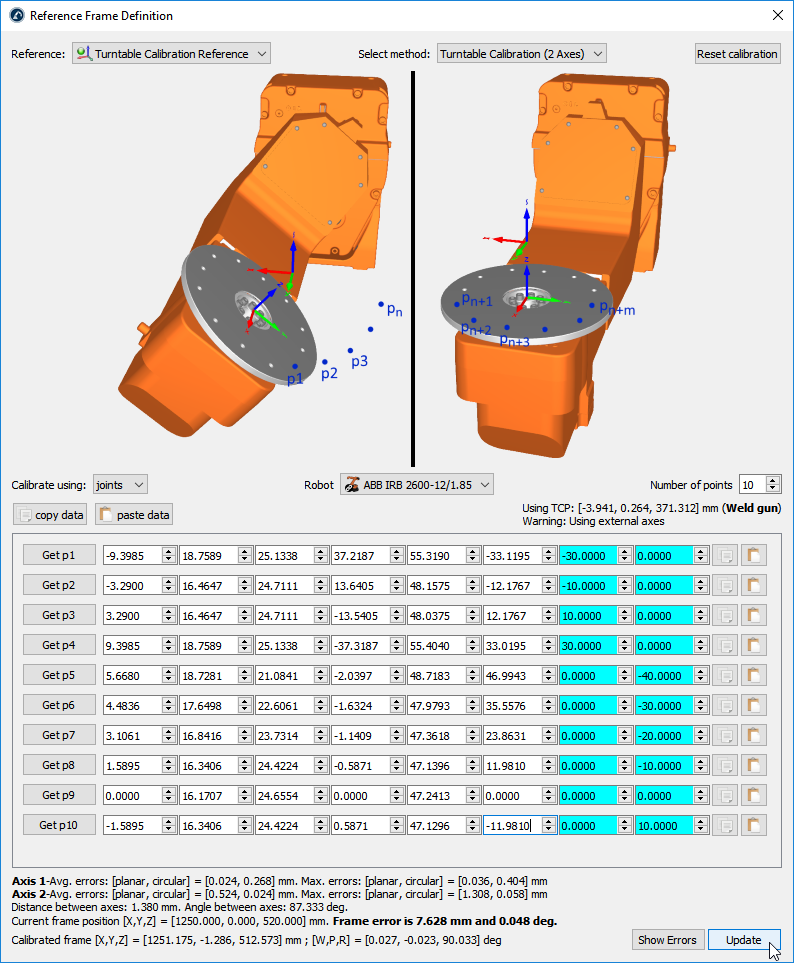
8.Finalmente, selecione Atualizar para aplicar a nova posição ao frame de referência selecionado na Estação RoboDK.
9.Selecione Exibir Erros para exibir o nível de erro em cada ponto (os erros de distância são equivalentes aos erros planares e aos erros radiais combinados)
Importação de arquivos STEP e IGES
Os arquivos STEP e IGES são dois formatos suportados pelo RoboDK. Os arquivos STEP e IGES são arquivos 3D paramétricos. Outros formatos também são suportados.
A importação de arquivos STEP ou IGES pode levar muito tempo se o arquivo for grande ou complexo. Nesse caso, é possível reduzir o tempo necessário para importar esses arquivos no menu Ferramentas ➔ Opções ➔CAD➔ e selecione Configurações de importação rápida.
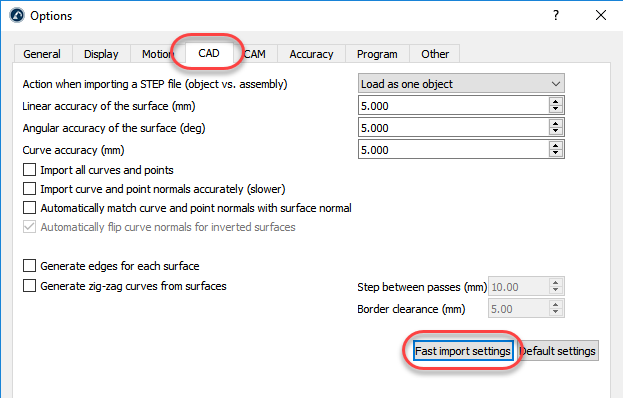
Essa opção atualizará as configurações padrão para importar esses arquivos paramétricos com muito mais rapidez. Por outro lado, as bordas curvas não serão importadas, e a precisão das superfícies pode não ser tão suave.
Mais informações disponíveis sobre as configurações de importação no menu CAD.
Desempenho da tela
Se você tiver uma célula grande ou complexa, poderá ter um desempenho ruim da tela ou uma baixa taxa de quadros em suas simulações. Isso pode acontecer se você tiver muitos objetos ou geometria complexa em sua estação. A importação de arquivos 3D grandes pode reduzir a taxa de quadros e tornar as simulações mais lentas (consulte a seção anterior).
Você pode seguir uma ou mais das etapas a seguir para melhorar a velocidade da simulação e ter uma taxa de quadros mais rápida:
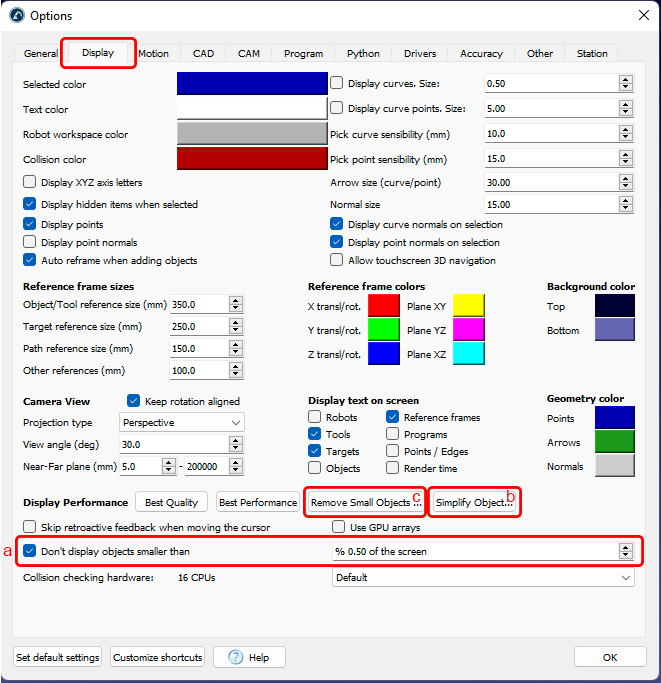
a)Ignorar a exibição de objetos pequenos: Selecione Ferramentas ➔ Opções ➔ Exibição e marque a opção " Não exibir objetos menores que " e defina-a como 2% ou mais.
b)Simplifique a geometria do objeto: Selecione Simplificar objeto... na mesma guia Exibir. Essa ação não altera a aparência dos objetos 3D. Ao selecionar a raiz da estação (o primeiro item), a simplificação será aplicada a todos os objetos da estação.
c)Remover objetos pequenos: Selecione Remover Objetos Pequenos... para remover objetos e triângulos pequenos. Isso excluirá os objetos e triângulos menores que um determinado tamanho.
Exportar simulação
Quando Você tiver uma simulação/programa pronto no RoboDK, poderá exportá-lo facilmente como um link compartilhável do RoboDK para a Web, como um HTML 3D ou PDF 3D.
Você pode gerar links públicos do RoboDK para a Web, documentos 3D HTML e 3D PDF seguindo estas etapas:
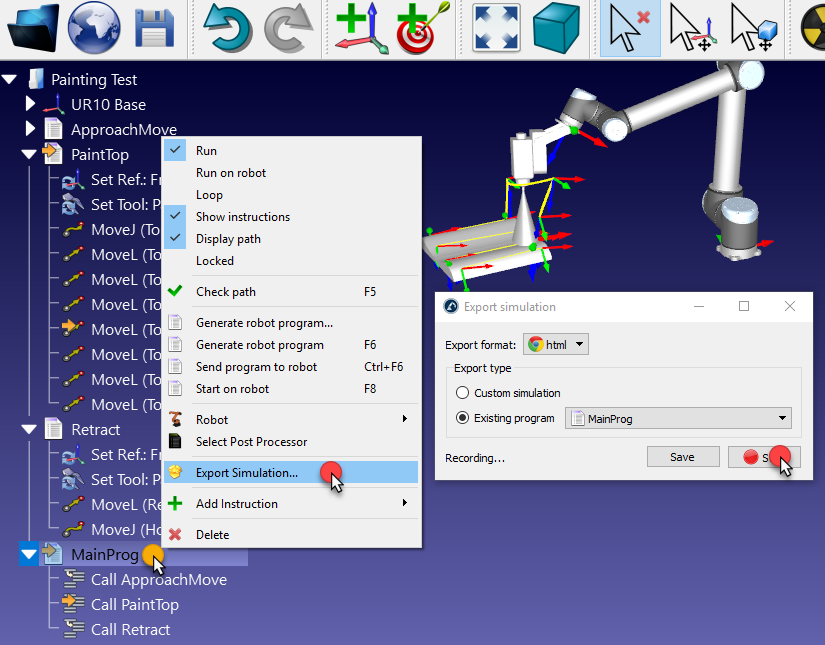
1.Clique com o botão direito do mouse em seu programa (Main Program, neste exemplo)
2.Selecione
3.Selecione Iniciar. O programa será iniciado e a simulação será gravada até que o programa seja concluído.
Salve o arquivo. Depois que o arquivo for salvo, ele será aberto automaticamente e você poderá visualizar o resultado.
Exportar para o RoboDK para a Web
Você pode exportar facilmente seu projeto como um link compartilhável do RoboDK para a Web. O link será exclusivo e estará disponível para qualquer pessoa que tenha acesso a ele.
Ao exportar o projeto, você obterá um link para acessar um painel de controle para gerenciar os links exportados.
Os links a seguir são exemplos de links exportados do RoboDK para a Web:
●Exemplo de um projeto RoboDK exportado: https://web.robodk.com/lnk/35303930233736
●Abra este link https://robodk.com/example/Assembly-and-Palletizing-with-ABB-and-Fanuc e selecione Alternar visualização 3D.
●Você pode selecionar detalhes em qualquer exemplo da biblioteca de estações e selecionar Alternar visualização 3D para visualizar o projeto no RoboDK for Web.
Exportar a simulação para uma simulação HTML 3D
Você pode exportar seu projeto como uma simulação HTML 3D em um único arquivo. A compactação de um arquivo HTML reduzirá consideravelmente seu tamanho e você poderá enviá-lo por e-mail.
Os links a seguir são exemplos de simulações em HTML 3D:
●https://robodk.com/simulations/UR-Paint.html
●https://robodk.com/simulations/Welding-3-Fanuc-Robots.html
●https://robodk.com/simulations/Robot-Drawing.html
Exportar simulação para PDF 3D
Você pode exportar sua simulação ou um programa como um documento PDF 3D. Os documentos PDF exportados devem ser abertos usando o Acrobat Reader (não um navegador).
Os links a seguir mostram exemplos de simulações em PDF 3D:
●https://robodk.com/simulations/UR-Paint.pdf
●https://robodk.com/simulations/Welding-3-Fanuc-Robots.pdf
●https://robodk.com/simulations/Milling-with-External-Axes.pdf
Exportar simulação para o Blender
Você pode exportar sua simulação como um projeto do Blender usando o add-in de exportação do Blender.
Velocidade de simulação
A velocidade de simulação (ou a taxa de simulação) é a velocidade com que o RoboDK simula um movimento real. Uma taxa de simulação de 1 significa que um movimento que leva 1 segundo em um robô real levará 1 segundo para ser simulado.
Por padrão, o RoboDK simula 5 vezes mais rápido do que o tempo real. Isso significa que um programa que leva 5 segundos para ser executado no robô real será simulado em 1 segundo. Acelerar a simulação aumenta essa proporção para 100. As velocidades de simulação normal e rápida podem ser alteradas no menu Ferramentas➔ Opções ➔Movimento.


Tempo de ciclo
O RoboDK pode fornecer estimativas de tempo de ciclo quando você simula um programa. O tempo de ciclo é o tempo que um programa leva para ser concluído. A precisão do tempo de ciclo fornecido pelo RoboDK depende muito de vários fatores, incluindo o controlador do robô, o tipo de movimento do robô (movimentos joint versus movimentos lineares), o uso de arredondamento e as limitações reais de velocidade/aceleração.
Sob as circunstâncias corretas, o RoboDK pode calcular com precisão o tempo de ciclo. Isso acontece quando você programa o robô para fazer movimentos precisos de ponto a ponto (sem arredondamento) e não excede as limitações reais de velocidade e aceleração.
A velocidade e a aceleração do robô são importantes, pois dependem do robô. A velocidade e as acelerações do robô (velocidade/aceleração linear e do eixo) devem ser fornecidas como uma instrução ou no menu de parâmetros do robô. Por exemplo, você pode alterar a velocidade em um programa usando a instrução Definir Velocidade. O RoboDK assume que o robô tem uma aceleração uniforme até atingir a velocidade máxima e, em seguida, uma desaceleração uniforme.
Por padrão, o RoboDK usa a velocidade e a aceleração da articulação para os movimentos da articulação e a velocidade e a aceleração linear para os movimentos lineares. Essa configuração pode ser alterada (em Ferramentas➔ Opções➔ Movimento➔ Cálculo de tempo de movimentação).

Ferramenta Alterar cor
Você pode alterar a cor dos seus objetos no RoboDK usando a ferramenta Alterar Cor.
Siga estas etapas para alterar a cor de seu robô:
1.Selecione Ferramentas ➔ Alterar Cor.
2.Ao selecionar o modelo 3D, você poderá ver a cor real do robô.
3.Selecione Selecionar faces na janela Alterar Cor e, em seguida, selecione as faces cujas cores deseja alterar.
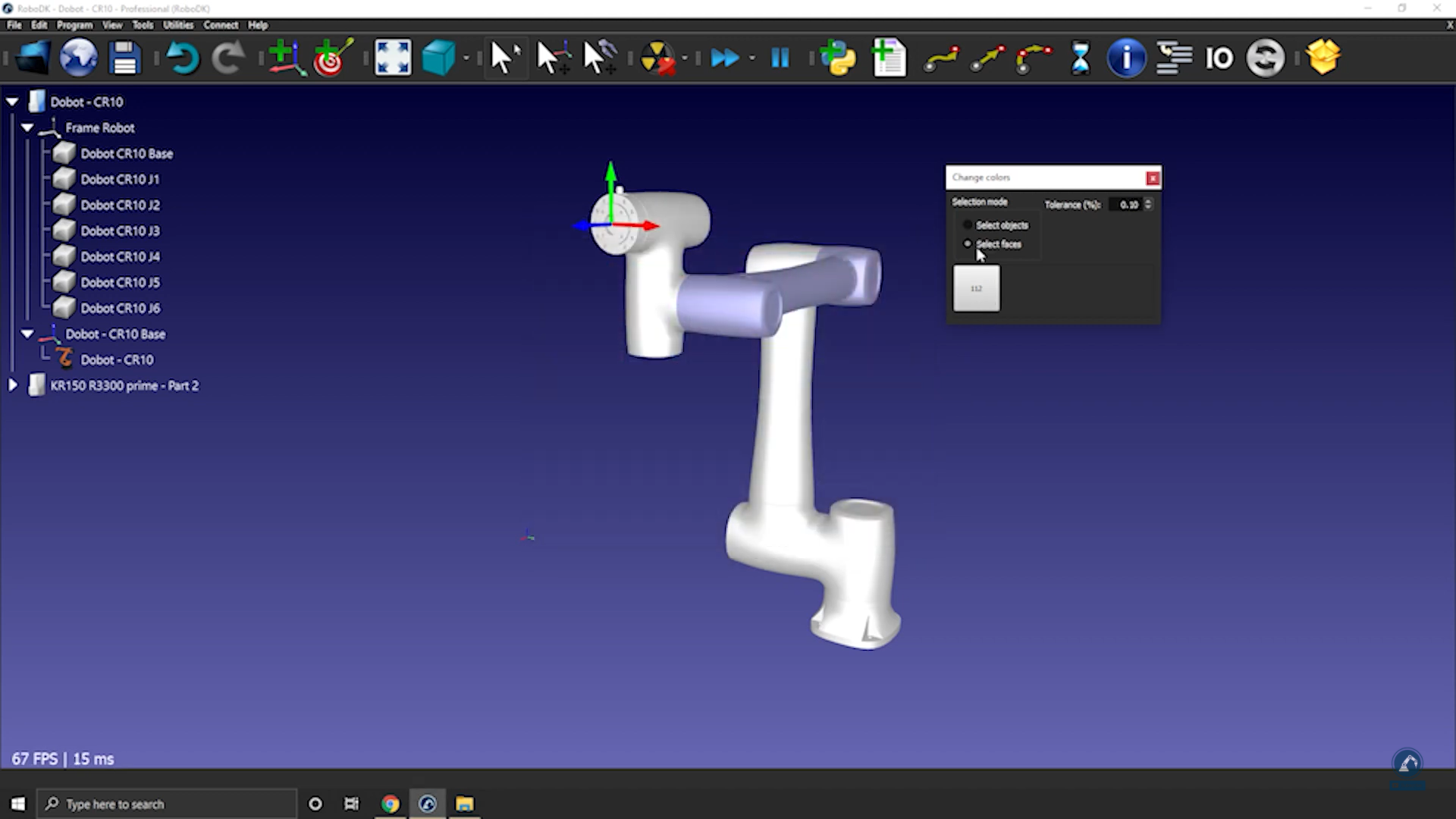
4.Depois de selecionar as faces, clique na cor e selecione uma nova cor.
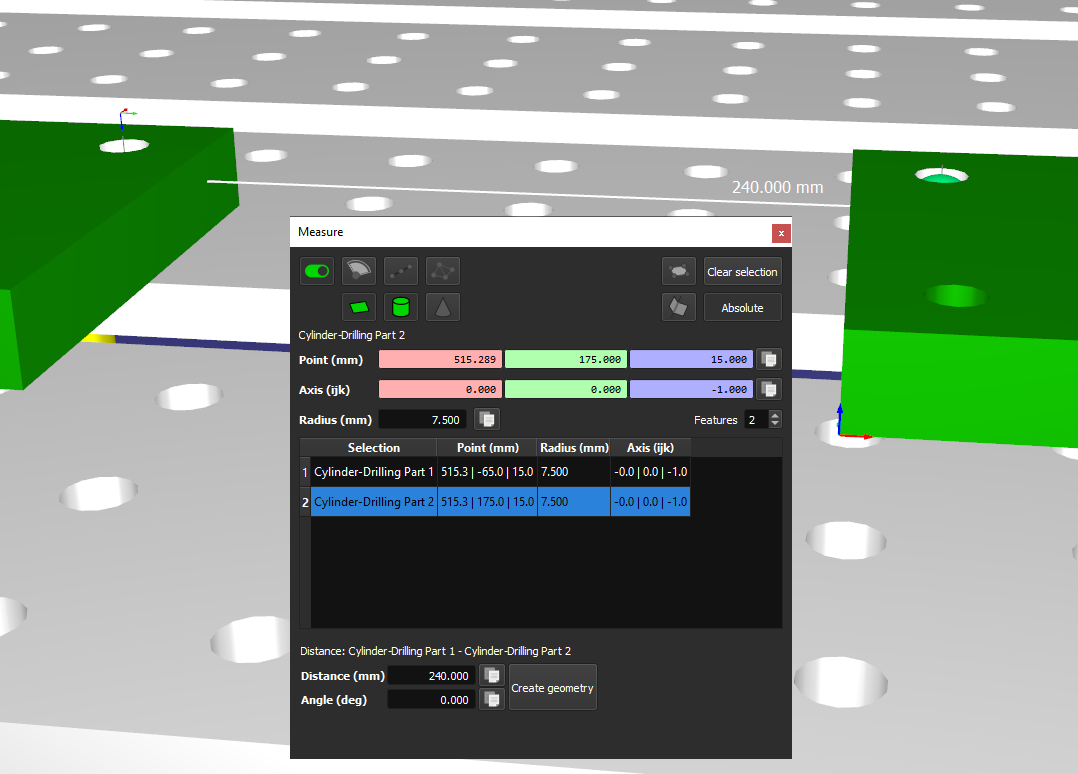
Ferramenta de medição
Usando a ferramenta de medição do RoboDK, você pode medir a distância entre diferentes características geométricas, como cilindros e planos, e extrair suas propriedades.
Selecione Ferramentas ➔ Medição para abrir a ferramenta de medição. Você pode então selecionar características geométricas na janela 3D.
Crie um mecanismo ou um robô
Você pode modelar novos mecanismos com o RoboDK, o que inclui plataformas giratórias, mecanismos de um a três eixos lineares, diferentes tipos de braços de robô, robôs Scara, AGVs, CNCs e garras.
Siga estas etapas para criar um novo robô ou mecanismo:
1.Selecione Utilitários➔ Modelar Mecanismo ou Robô.
2.Selecione o tipo de mecanismo ou robô que você deseja criar.
3.Selecione o sistema de coordenadas que representa a origem de seu mecanismo.
4.Selecione um objeto para cado eixo (parte móvel do mecanismo ou robô).
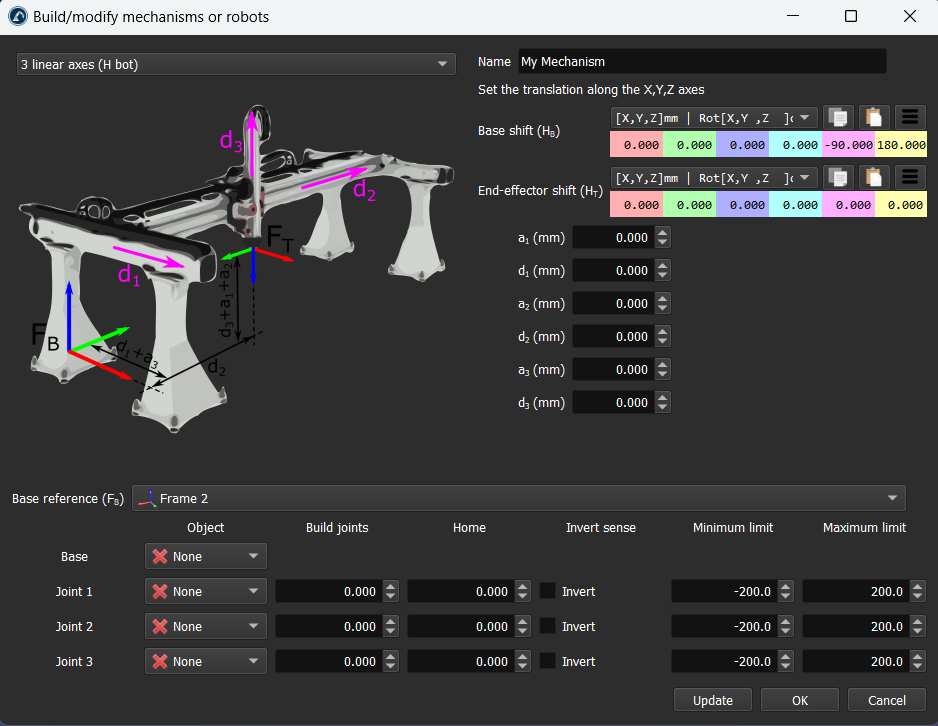
5.Insira os parâmetros do robô conforme descrito na imagem correspondente.
6.Selecione Atualizar para ver o novo mecanismo.
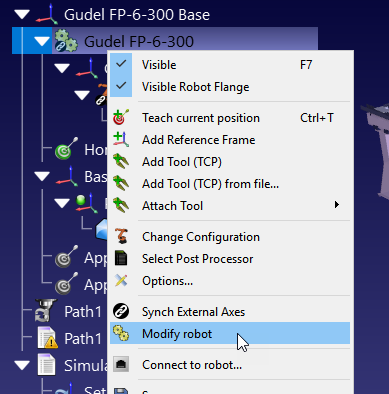
Você também pode modificar os mecanismos existentes clicando com o botão direito do mouse no item do robô na árvore e selecionando Modificar robô. Essa opção está disponível para robôs e mecanismos que você mesmo criou.
Você pode criar os seguintes tipos de mecanismos e robôs no RoboDK:
●Um eixo rotativo (uma mesa giratória ou uma pinça)
●Dois eixos rotativos (por exemplo: um posicionador de 2 eixos)
●Um eixo linear (como um trilho linear)
●Dois eixos lineares (como um T-bot)
●Três eixos lineares (como um H-bot)
●Um eixo linear + um eixo rotativo
●Garras de dois dedos
●Robôs Scara (4 eixos)
●Braços robóticos de seis eixos
●Braços robóticos de sete eixos
Como modelar uma plataforma giratória de um eixo
Esta seção mostra como é possível modelar uma mesa giratória de um eixo. As mesas giratórias são frequentemente usadas em aplicações de usinagem de robôs.
Siga estas etapas para criar uma plataforma giratória:
1.Carregue os modelos 3D da plataforma giratória: arraste e solte os modelos 3D na janela do RoboDK (como arquivos STL, STEP ou IGES).
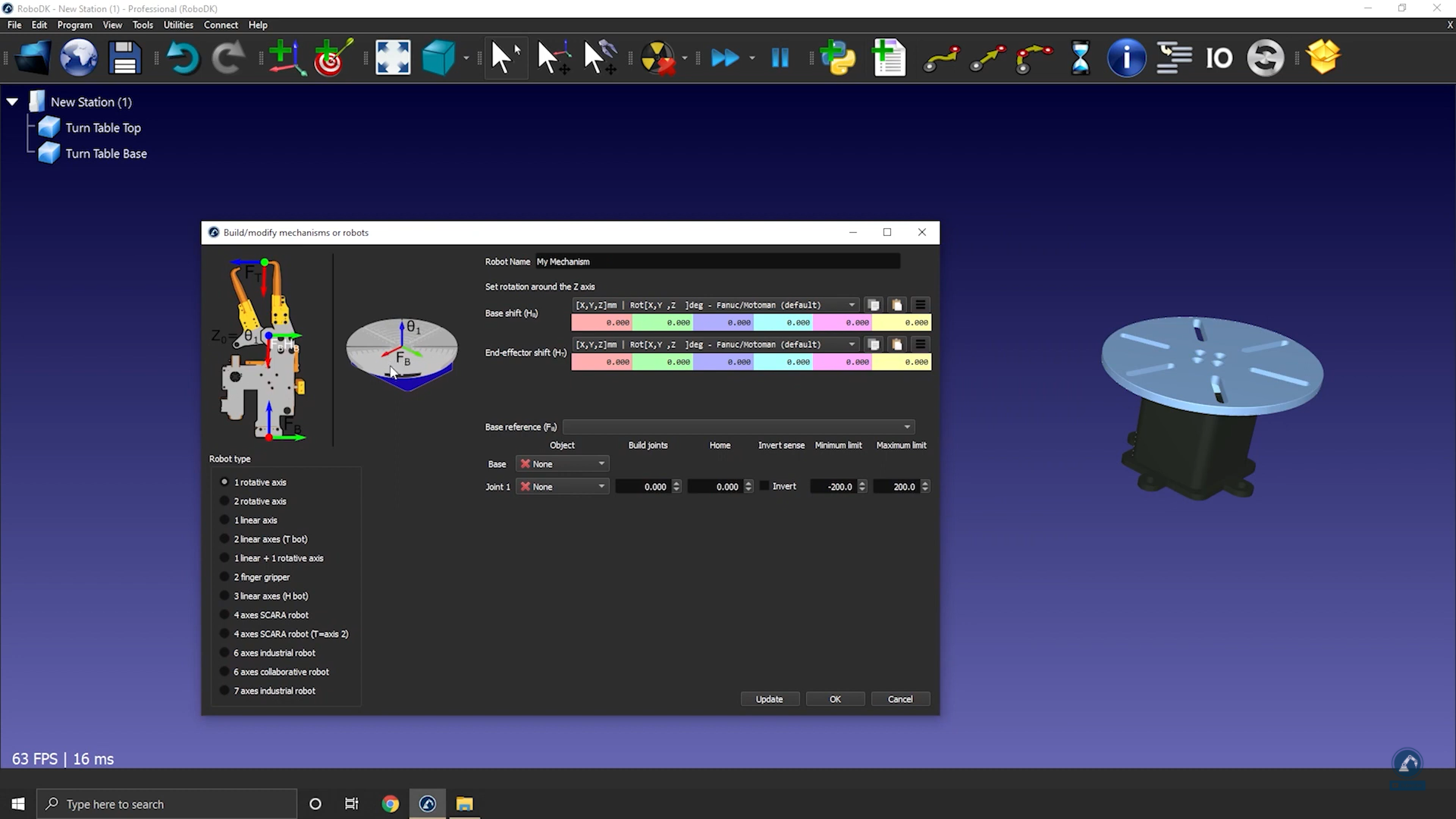
2.Selecione Utilitários➔ Modelar Mecanismo ou Robô.
3.Selecione 1 eixo rotativo.
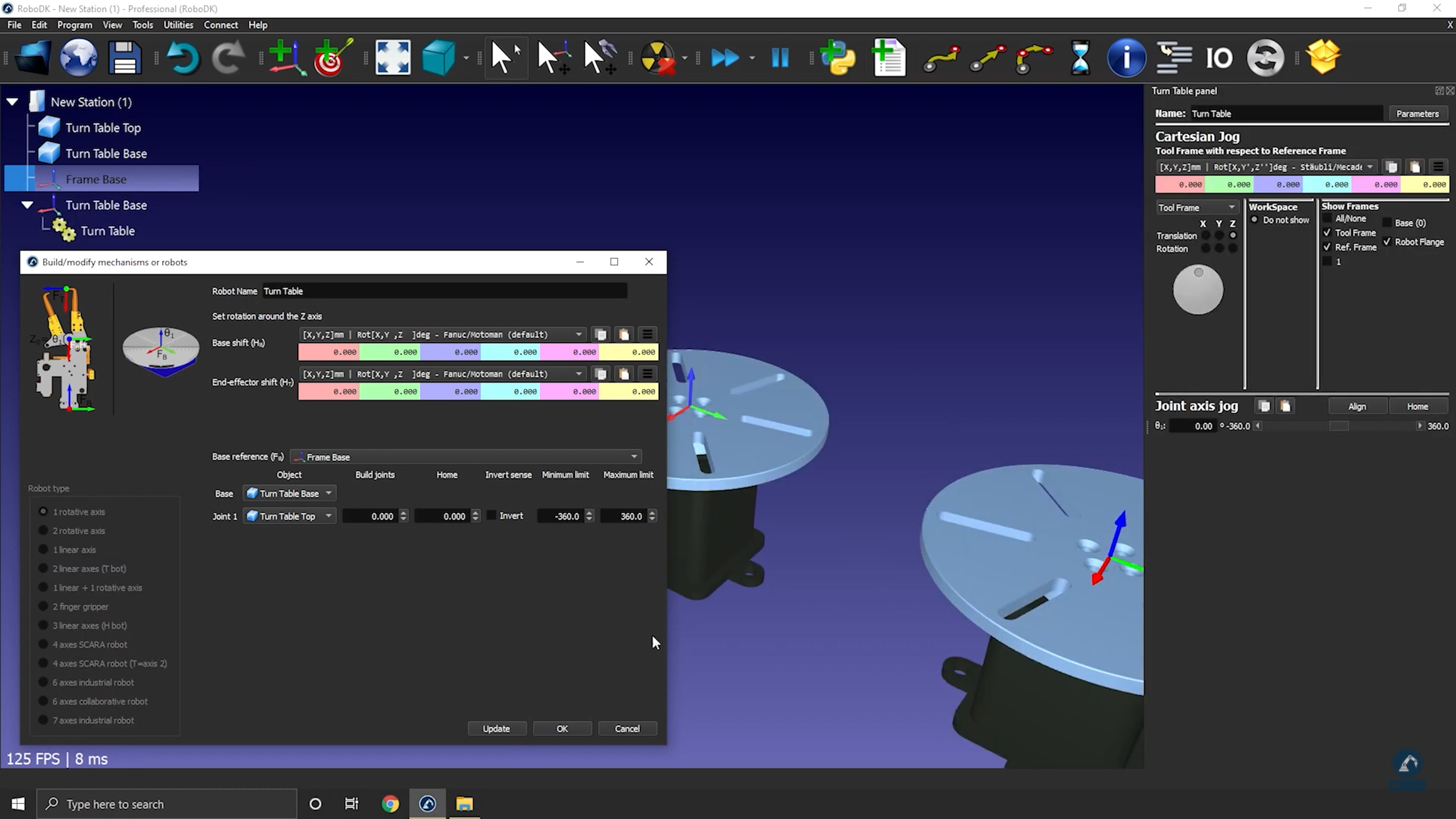
4.Se você observar a imagem, ela deverá mostrar como a base e a placa superior devem ser posicionadas. No caso de um eixo rotativo, o mecanismo girará em torno do eixo Z de Fb (Frame Base)
5.Renomeie seu mecanismo para TurnTable.
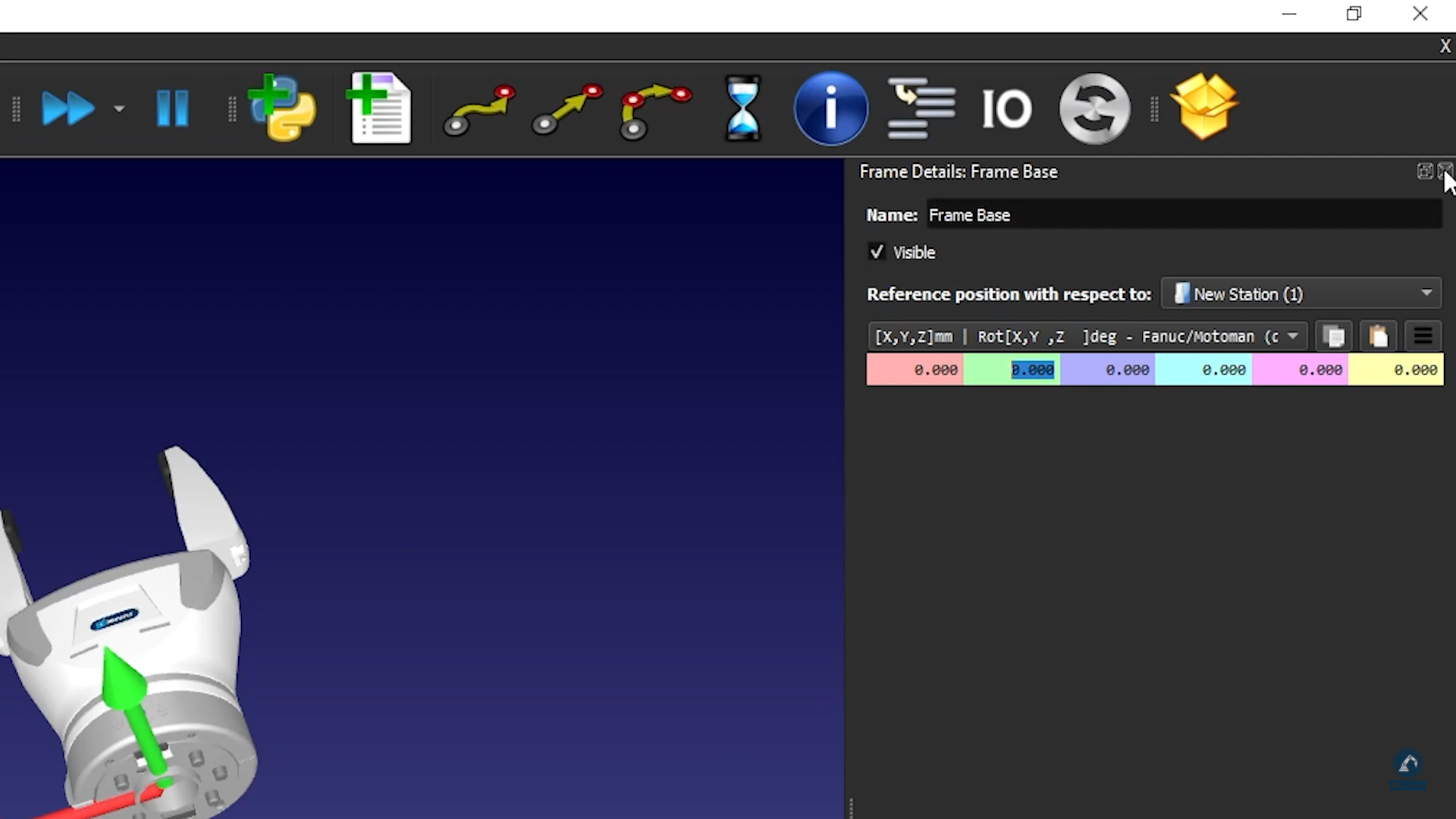
Defina a referência de sua plataforma giratória criando um novo sistema de coordenadas:
1.Crie um frame de referência e selecione F2 para nomeá-lo como Frame Base.
2.Modifique a posição da moldura abrindo o Painel Frame.
3.Selecione Ferramentas e Medição.
4.Meça a posição da superfície clicando no mecanismo; você pode ver a diferença entre a origem e o centro. Você pode copiar os valores e colá-los conforme mostrado na imagem abaixo.
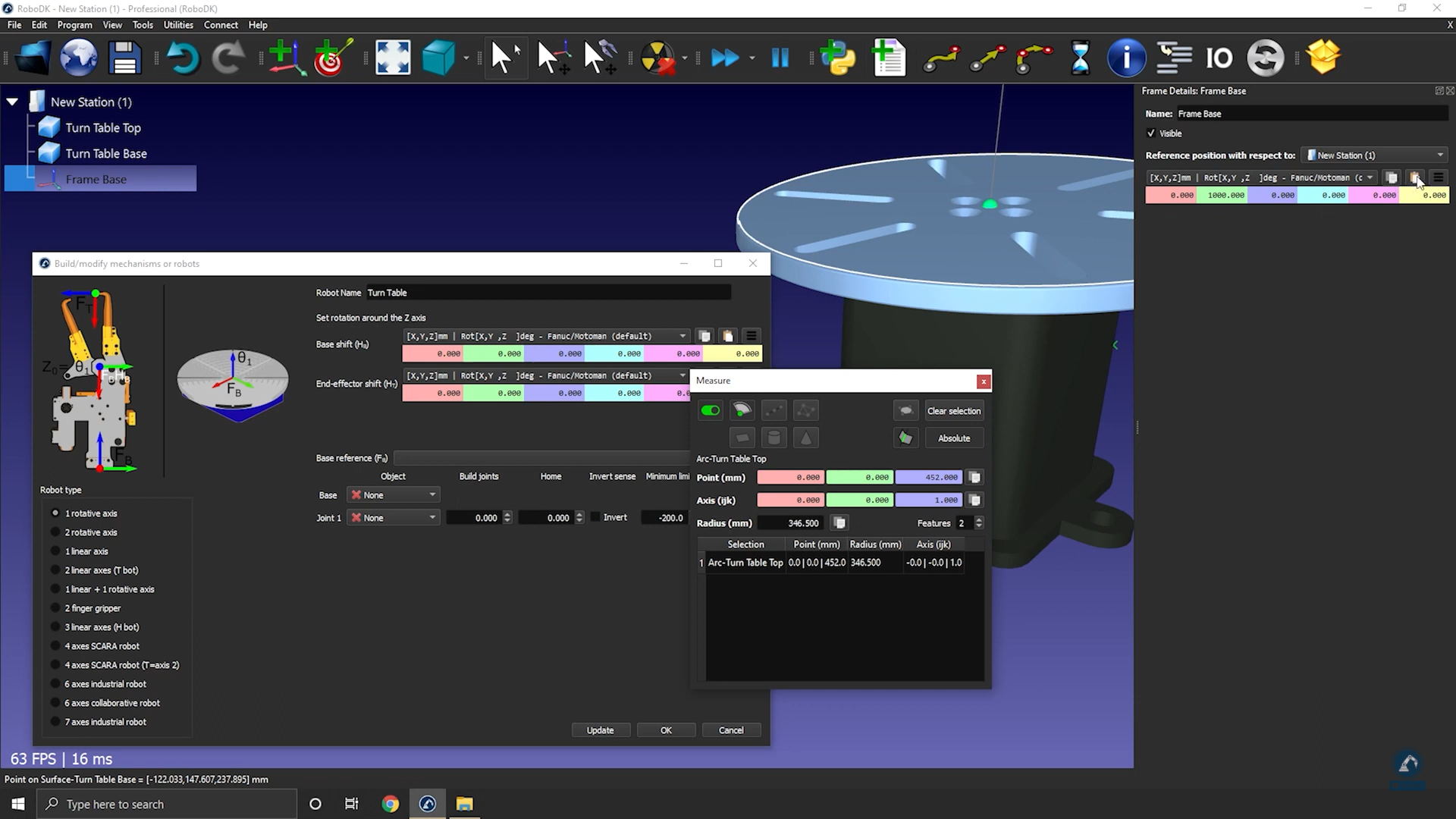
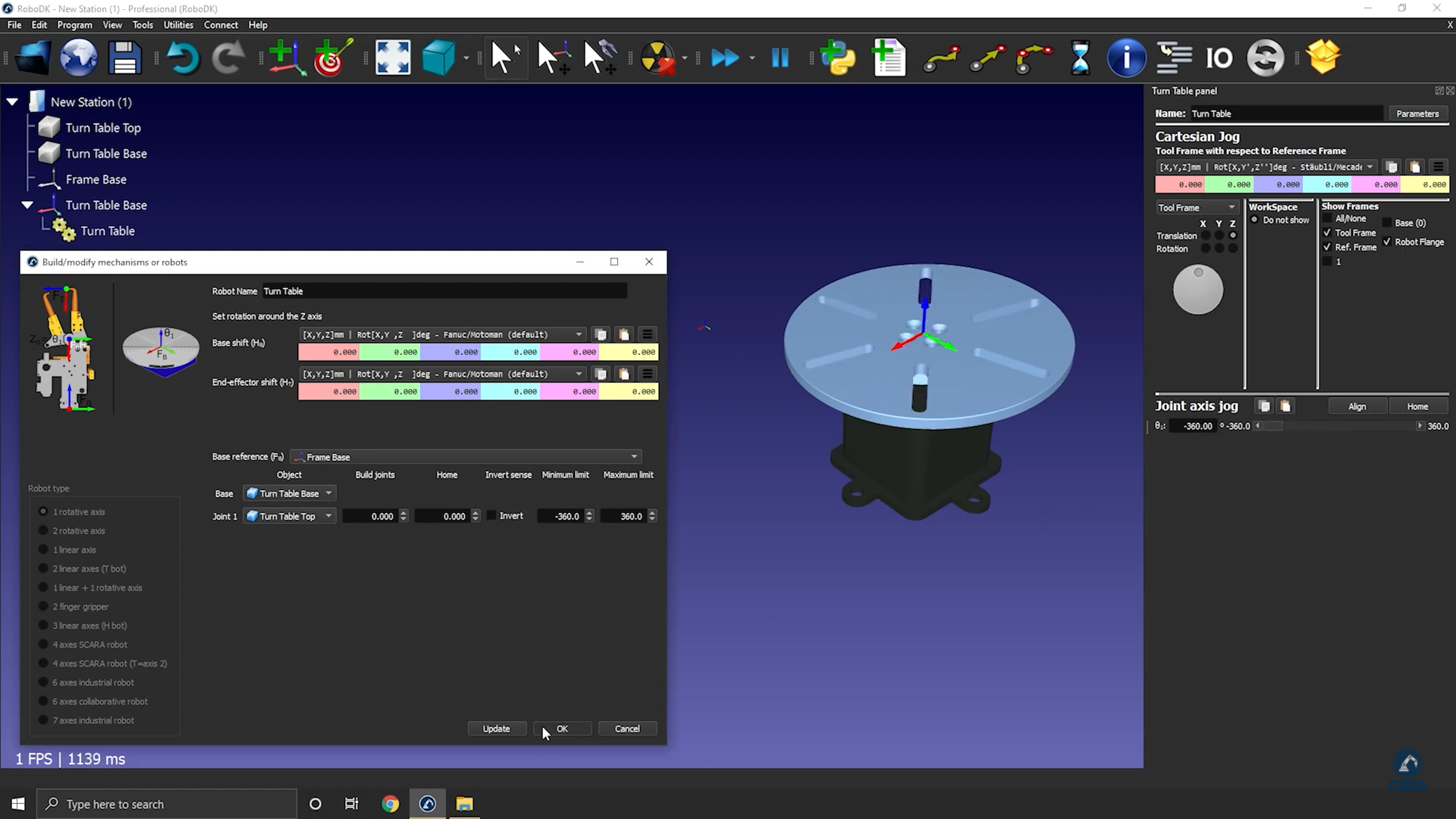
A posição de referência deve agora corresponder à referência na imagem. O frame de referência e os itens de objeto devem ser preenchidos automaticamente. Se a seleção automática não estiver correta, você pode atualizá-la adequadamente.
6.Você pode atualizar os limites do eixo, por exemplo, se quisermos ter +/-20 voltas, podemos inserir +/-7200 graus. Você também pode alterar os limites do eixo posteriormente clicando duas vezes nos rótulos de limite do eixo do painel do robô.
7.Selecione Atualizar para gerar o mecanismo: o novo mecanismo será exibido.
8.Você pode selecionar OK para fechar o menu ou adicionar outras alterações à sua mesa giratória, se necessário.
9.Você pode excluir os arquivos de objeto originais que usou para criar o mecanismo. O mecanismo será salvo com seu projeto RDK e não requer nenhuma dependência externa.
10.Depois de testar a tabela (verifique se ela está se movendo na direção certa e se os limites são os esperados), você pode selecionar OK na janela Modelar mecanismo para fechá-la.
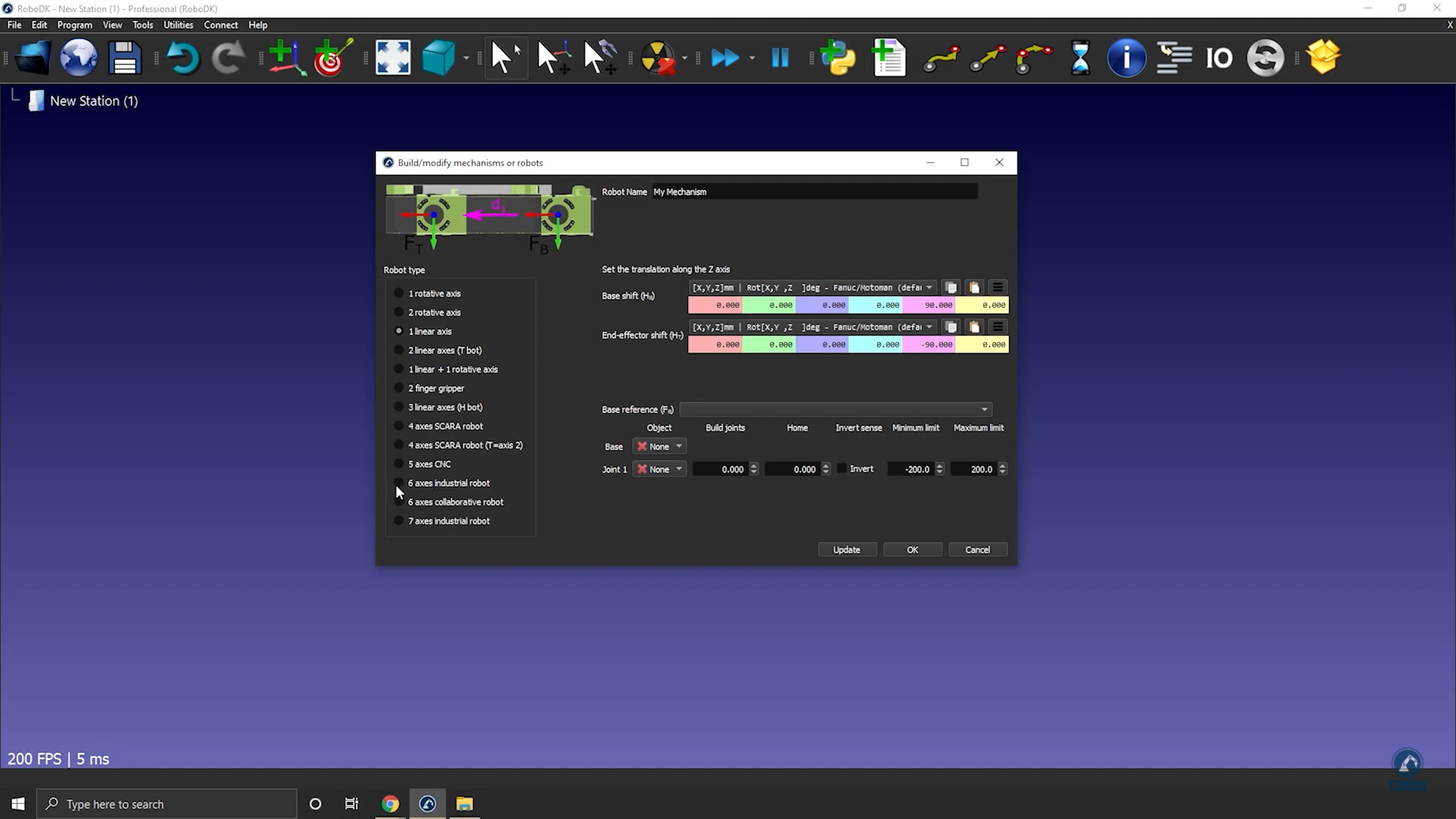
Como modelar um trilho linear de um eixo
Esta seção mostra como modelar um trilho linear de 1 eixo, também conhecido como eixo linear ou pista linear. Um trilho linear ajuda a ampliar o alcance dos braços do robô.
Siga estas etapas para importar seu modelo 3D:
1.Arraste e solte seu modelo 3D no RoboDK para importar os objetos para sua estação (os formatos de arquivo aceitos incluem STEP, IGES ou STL, que são formatos 3D comuns).
Siga estas etapas para abrir seu construtor de mecanismos:
2.Selecione Utilitários➔ Modelar Mecanismo ou Robô
3.Certifique-se de que 1 eixo linear esteja selecionado em "Tipo de robô".
4.Se o seu modelo 3D estiver agrupado em uma única peça, você pode dividir o modelo dentro do RoboDK.
Siga estas etapas para posicionar sua estrutura de base:
5.Agora que os objetos estão carregados, abra novamente o construtor de mecanismo de modelo Utilitários➔ Modelar mecanismo ou Robô.
6.Você pode renomear seu mecanismo em Nome do robô.
7.Considere que seu frame de base deve estar na posição 0 do trilho: Crie um frame de referência nesse local e nomeie-o Frame Base.
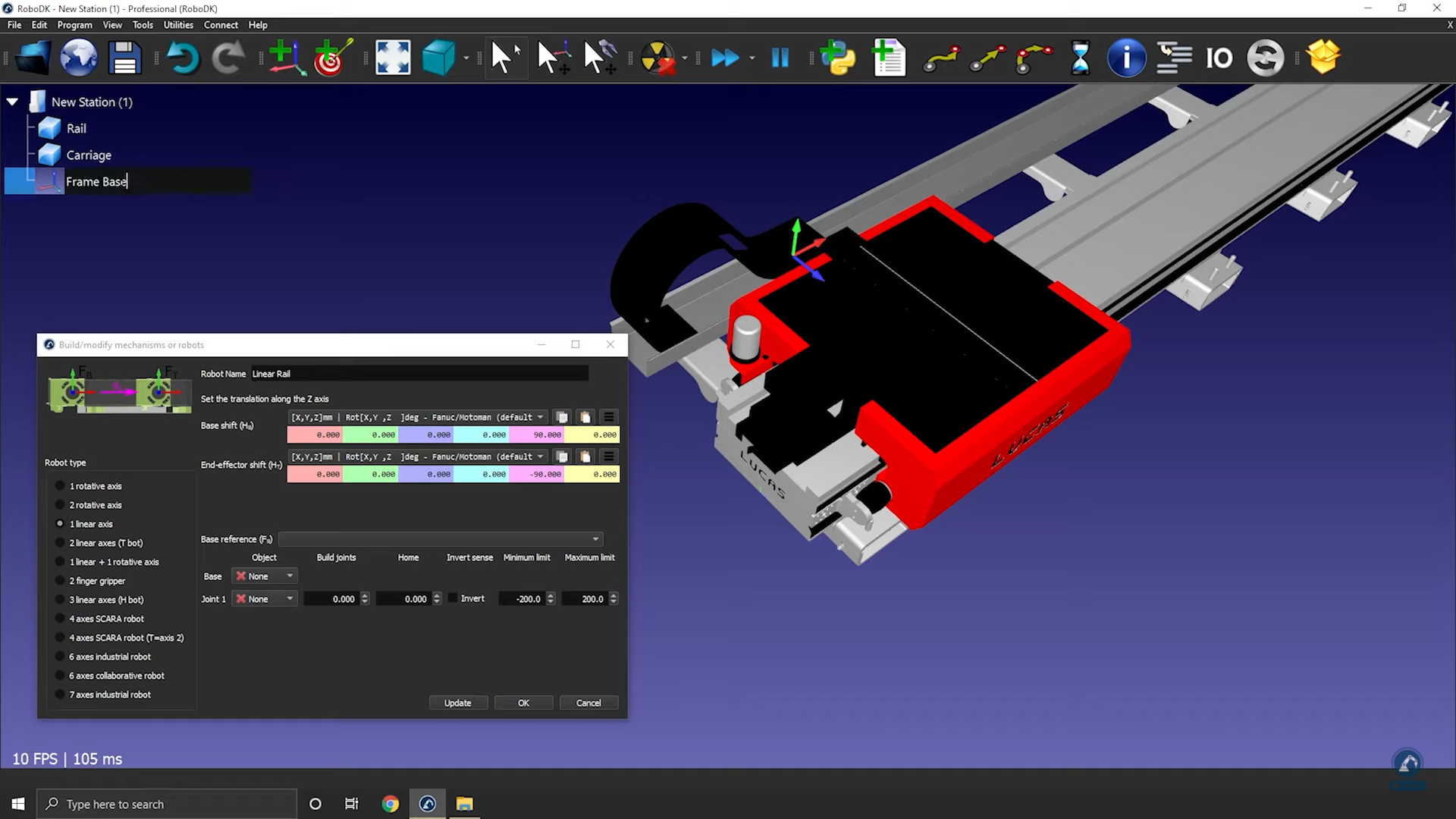
Siga estas etapas para modificar a posição da moldura:
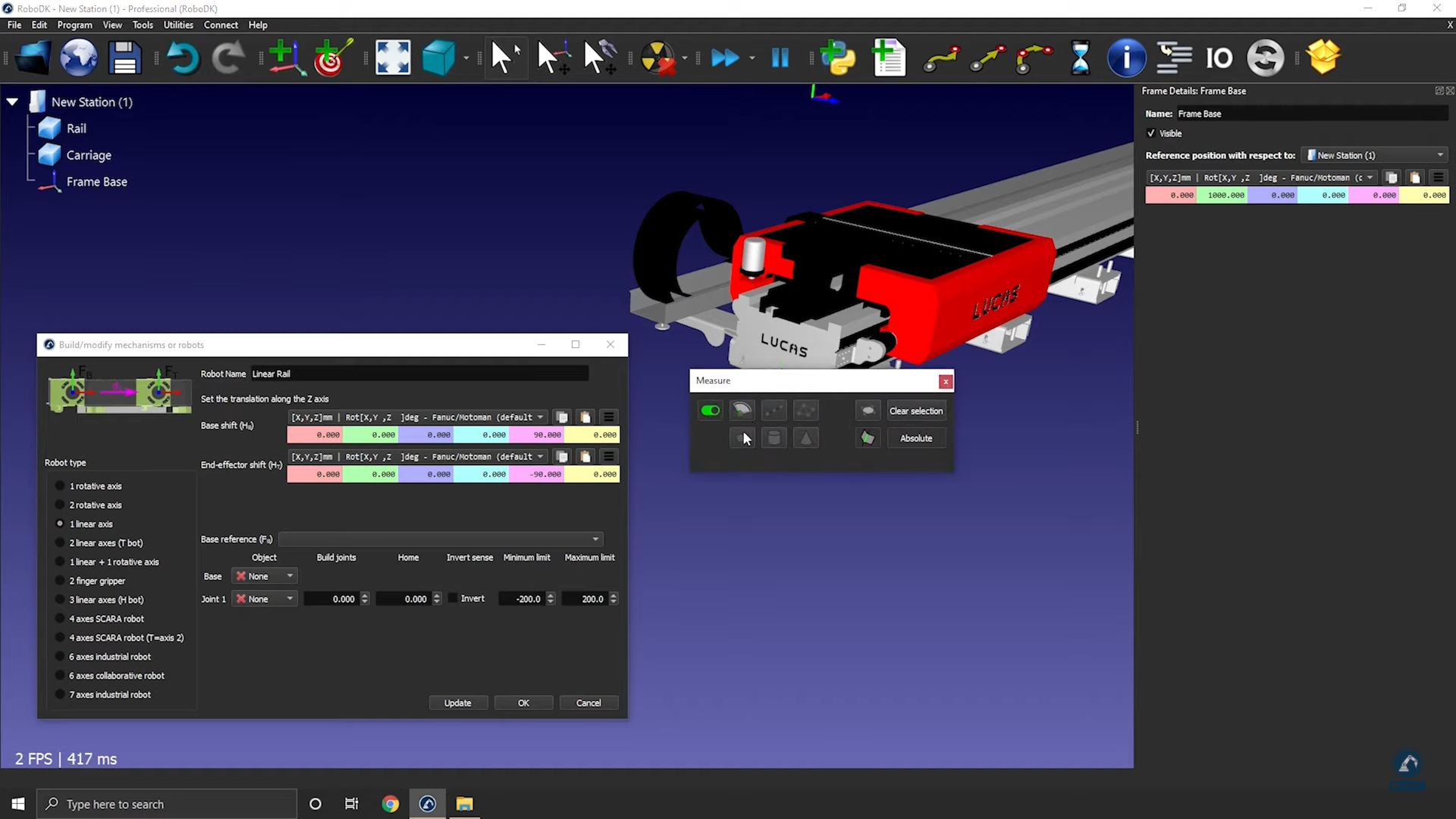
8.Selecione Ferramentas ➔ Medição
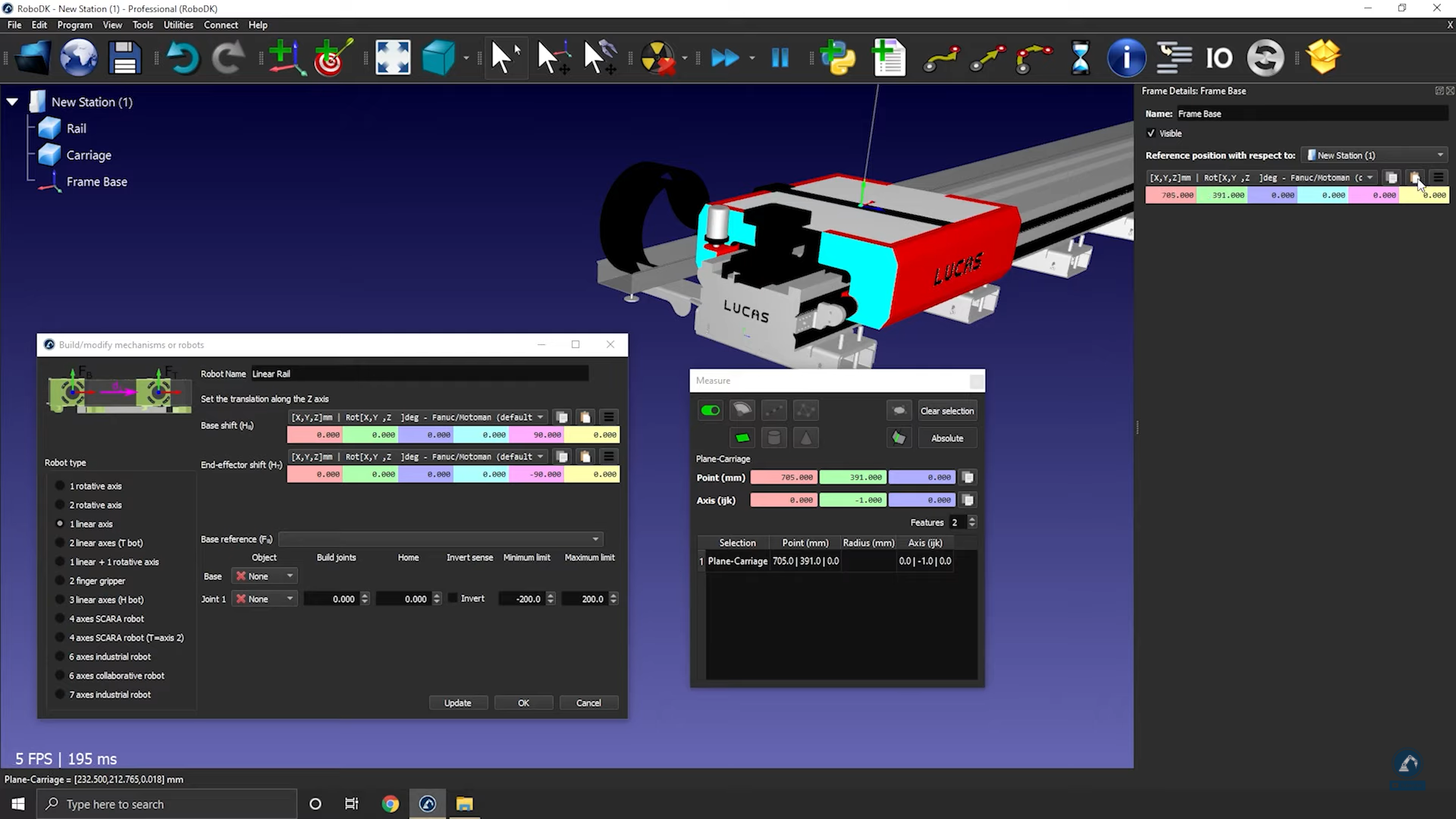
9.Use a ferramenta de medição para medir a posição da superfície selecionando o ícone (conforme mostrado na imagem abaixo).
10.Copie os valores e cole-os em Detalhes do Frame: Frame Base (como mostrado na imagem abaixo).
Siga estas etapas para verificar as orientações e inserir o comprimento do trilho:
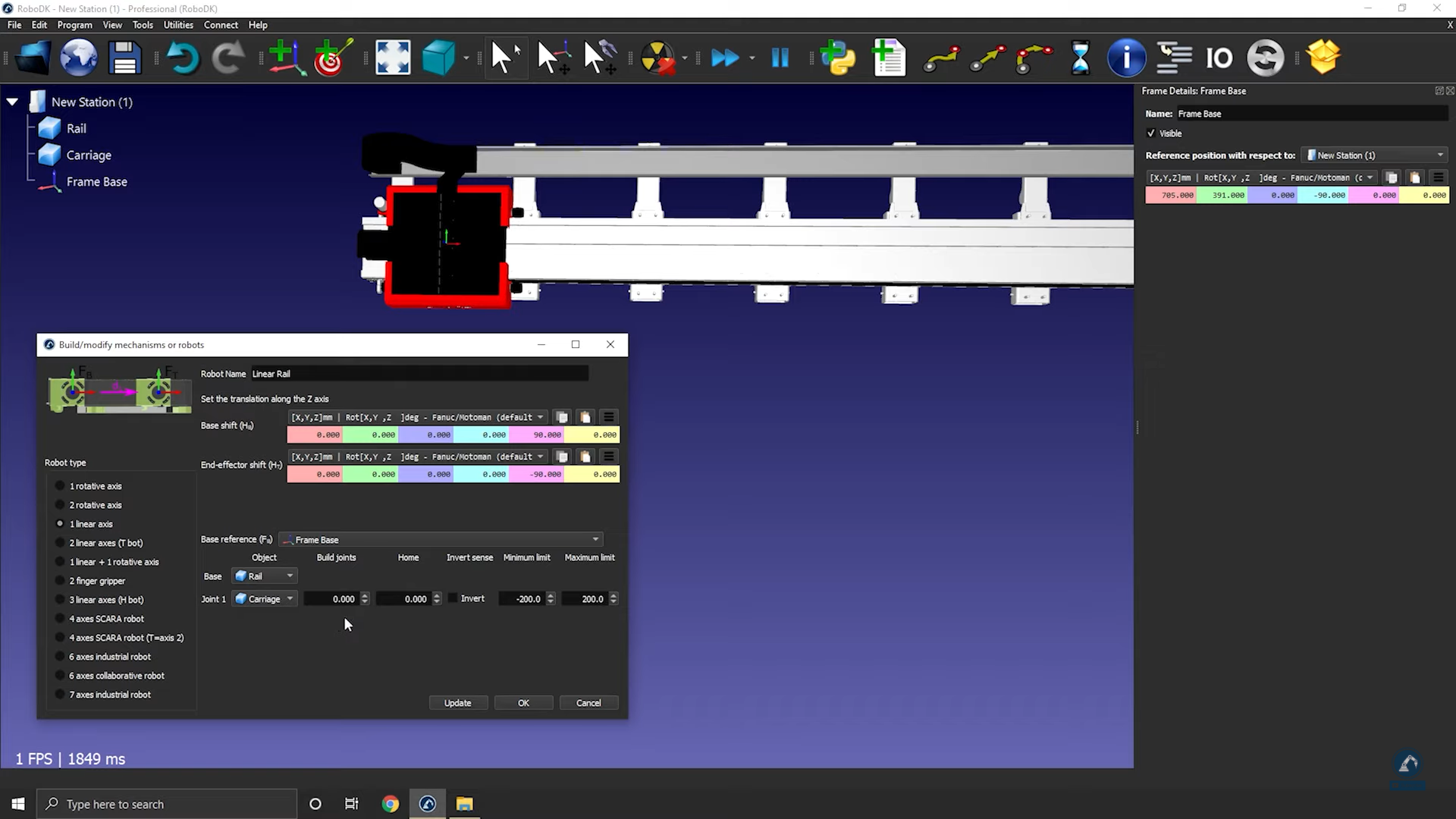
11.Girar no sentido horário, 90 graus em torno de X: Digite o valor -90.000 graus na janela de posição de referência.
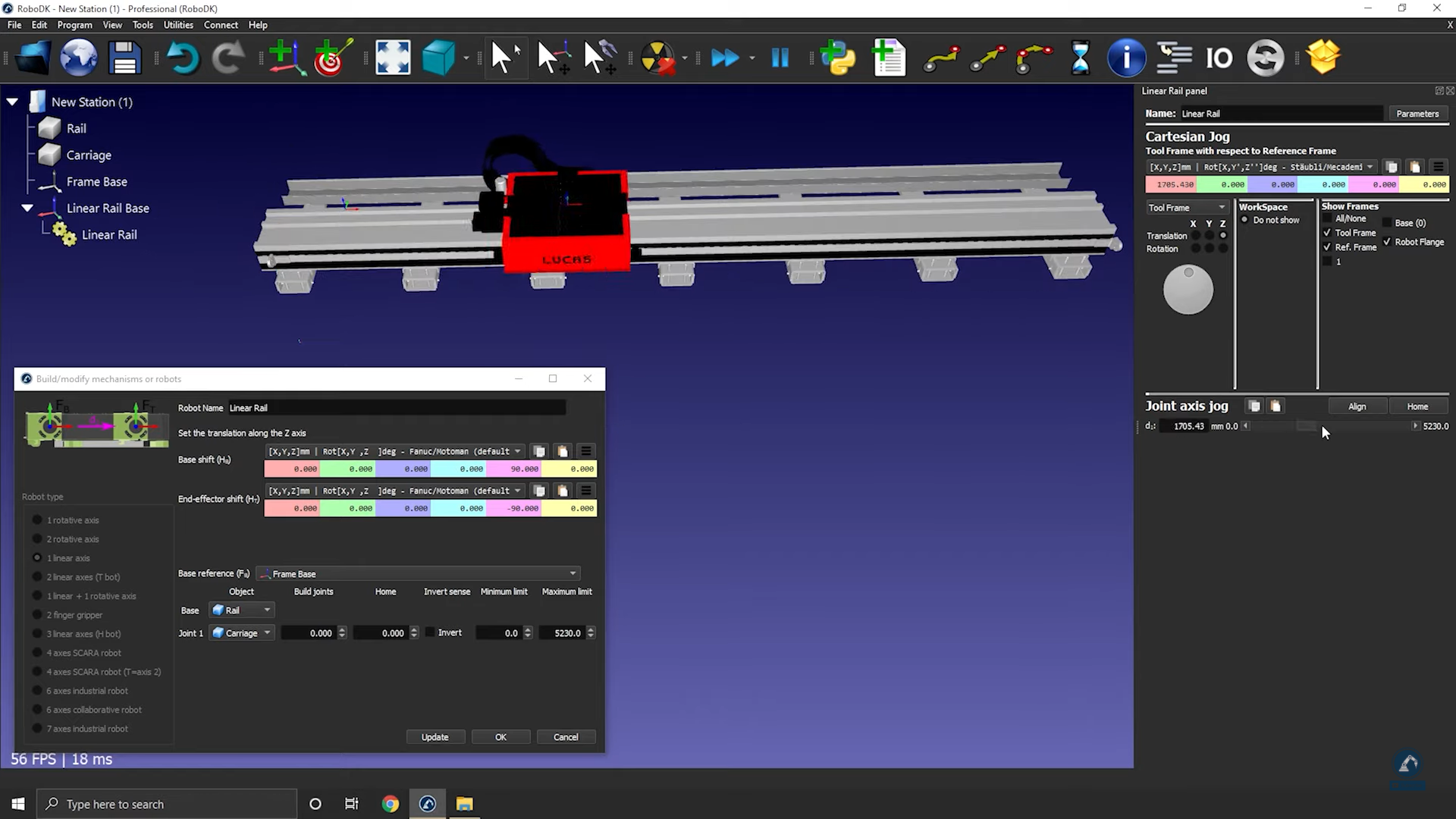
12. Digite o comprimento do trilho na janela do mecanismo do modelo (conforme mostrado na imagem abaixo).
13.Selecione Atualizar para criar o robô.
14.Você pode testar o trilho (certificar-se de que os limites estão corretos e que ele está se movendo na direção correta) usando o moimento do eixo.
15.Selecione OK quando você estiver satisfeito com os resultados.
Como modelar um trilho linear de dois eixos
Este exemplo mostra como modelar um trilho linear de 2 eixos, também conhecido como eixos lineares ou pista linear. Os eixos lineares são usados para ampliar o alcance dos braços do robô.
Siga estas etapas para configurar seu modelo 3D no RoboDK:
1.Importe seu modelo 3D para o RoboDK➔ e arraste e solte o arquivo STEP em sua estação.
2.Abra o Construtor de mecanismos: Utilitários➔ Modelar mecanismo ou Robô.
3.Em Tipo de robô, selecione 2 Eixos lineares (T-bot)
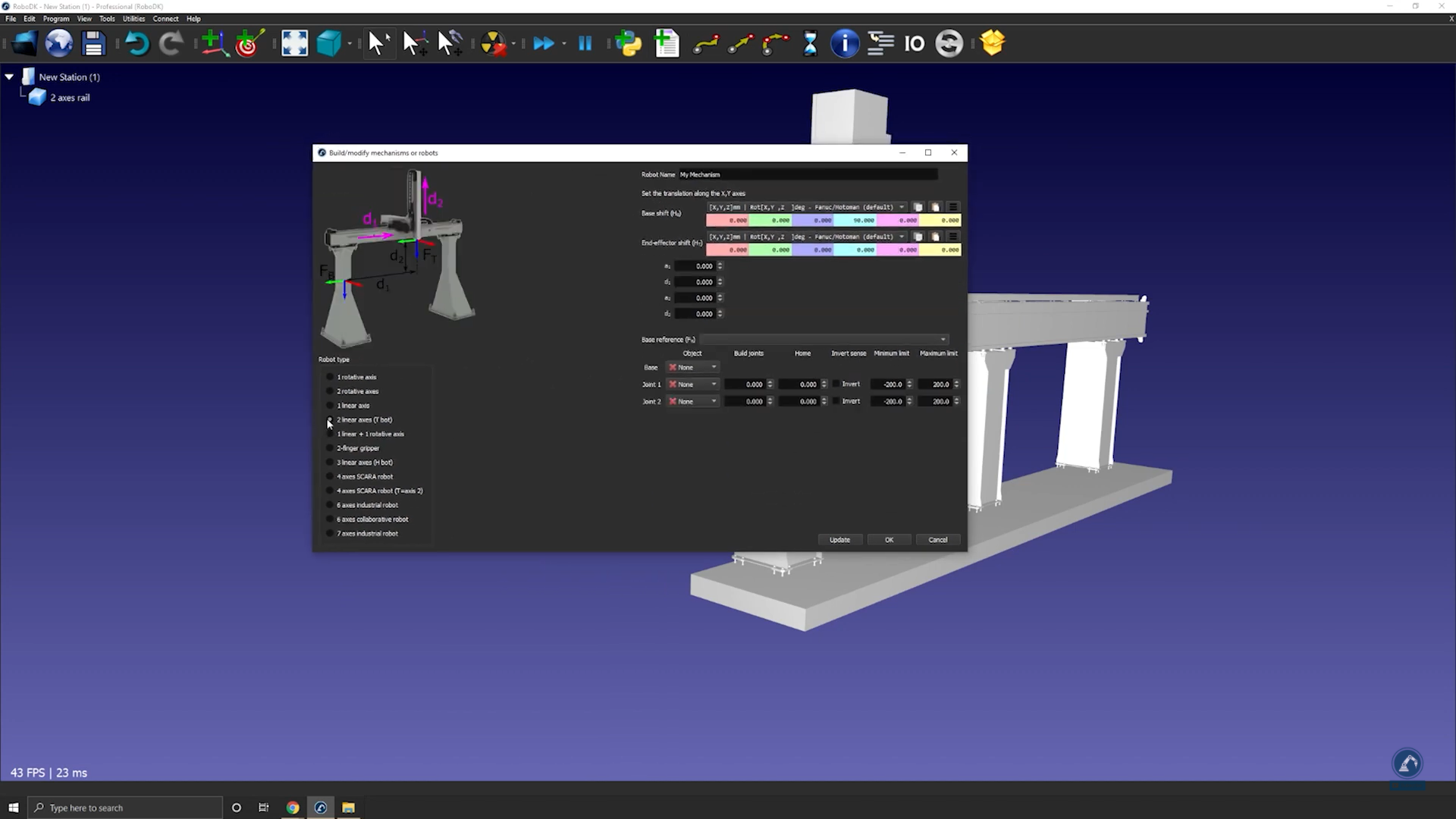
4.Quando o modelo estiver dividido em três partes, abra novamente o construtor de trilhos: Selecione Utilitários ➔ Modelar mecanismo ou Robô.
5.Selecione a opção: 2 eixos lineares (T-bot).
6.Renomeie seu robô para T-bot (em nome do robô).
Siga estas etapas para encontrar a localização de sua estrutura de base:
7.Se você considerar que o frame de base deve estar na posição 0 do trilho, crie o frame de referência exatamente nessa posição e renomeie-o para Frame Base.
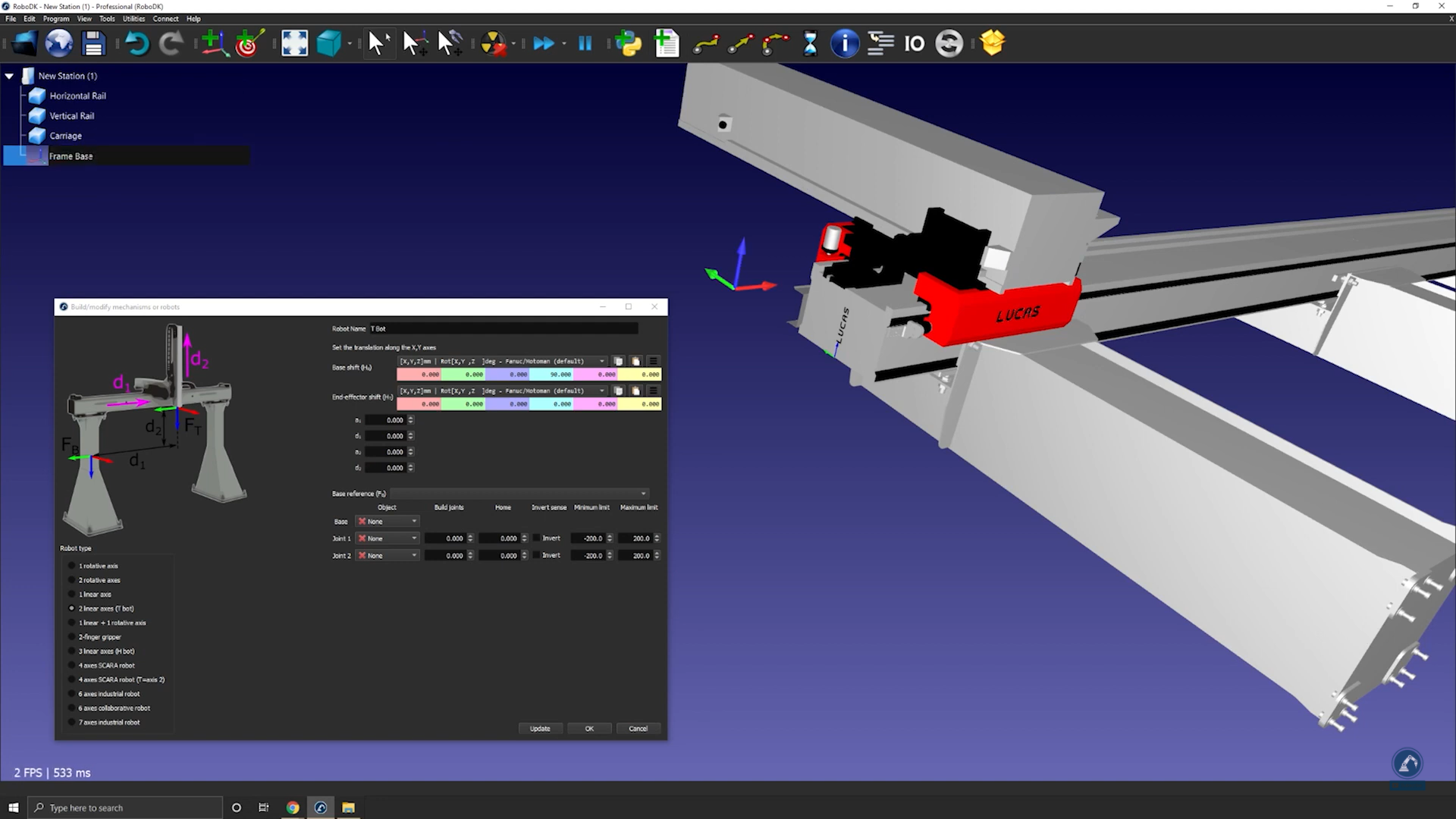
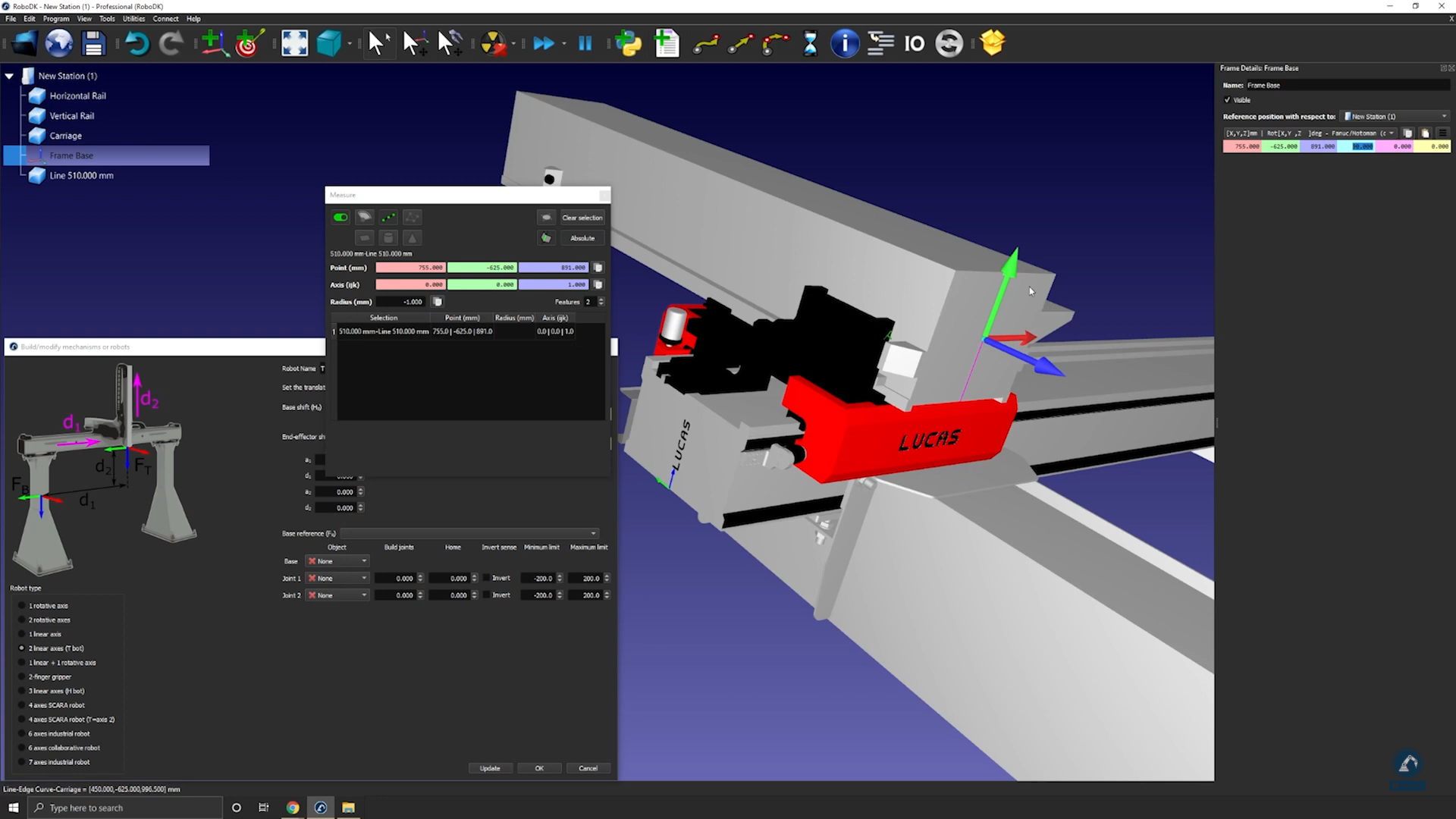
Siga estas etapas para modificar a posição da moldura:
8.Abra o painel de molduras clicando duas vezes na moldura.
9.Meça a posição do centro da superfície abrindo sua ferramenta de medição: Ferramentas➔ Medir
10.Selecione o ponto central de cada borda (conforme mostrado abaixo) para encontrar a distância entre as duas linhas.
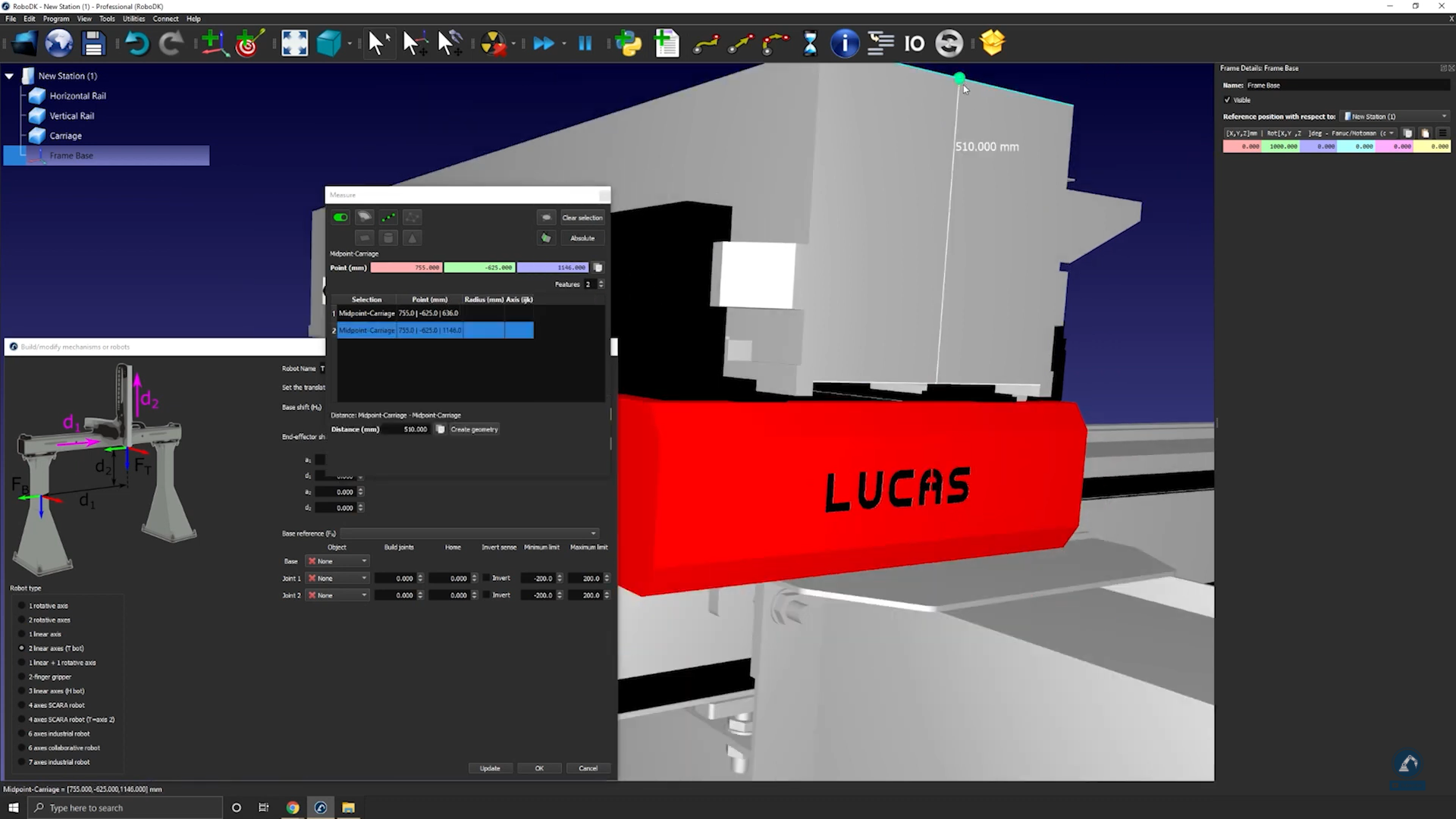
11.Selecione Criar geometria na janela Medição, que criará uma linha entre os dois pontos.
12.Selecione Limpar seleção.
Siga estas etapas para medir a posição do ponto central entre as duas linhas:
13. Selecione o ponto central da linha.
14.Copie os valores na janela Medição e cole os valores como a posição do quadro (conforme mostrado abaixo).
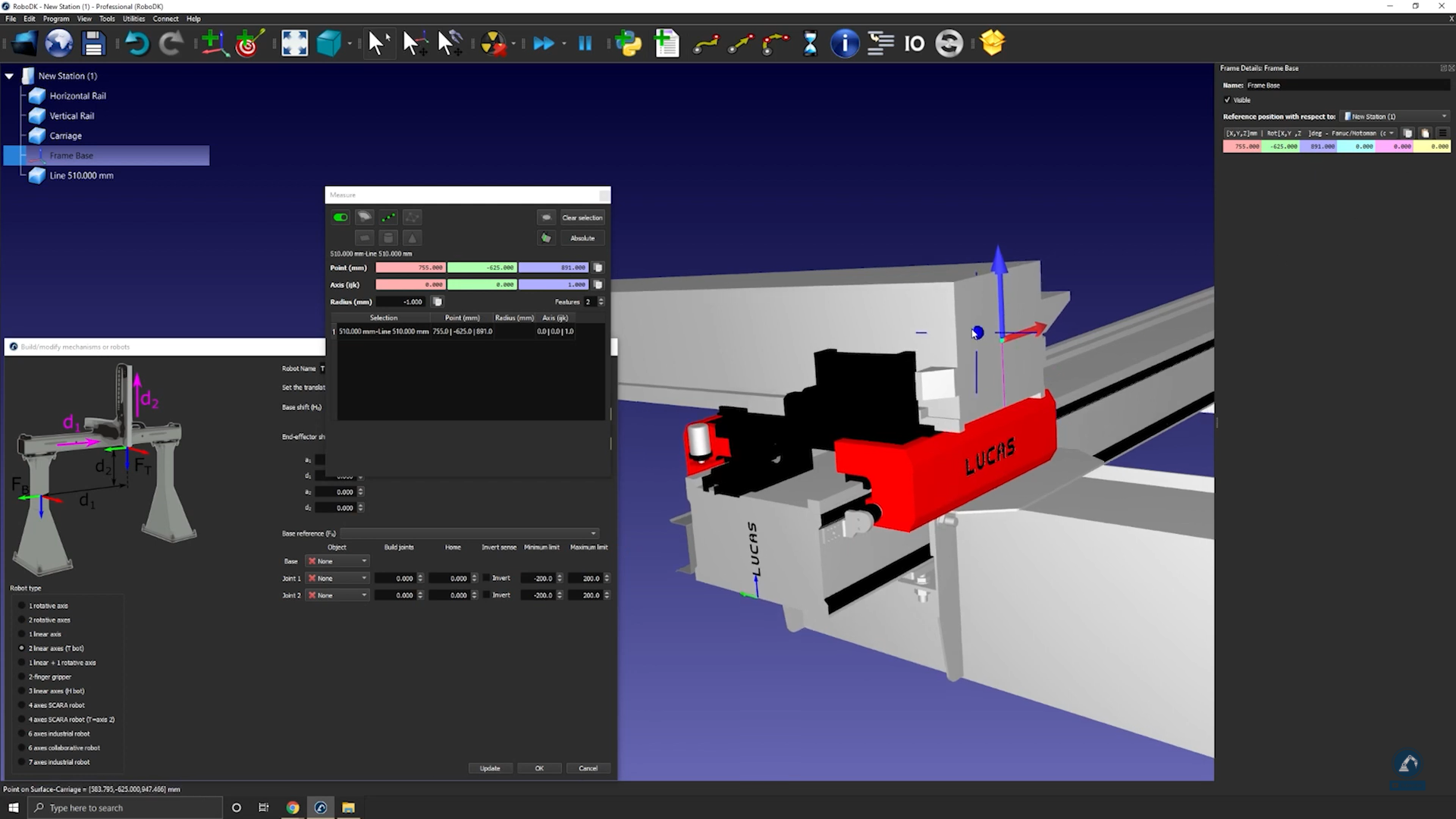
Siga estas etapas para garantir que as orientações sejam as mesmas:
15.Gire 90 graus no sentido anti-horário em torno de X e, em seguida, gire 90 graus em torno do eixo Z (conforme mostrado abaixo).
16.Digite as medidas do trilho na janela Modelar mecanismo ou Robô (Modelo de mecanismo ou robô), conforme mostrado abaixo.
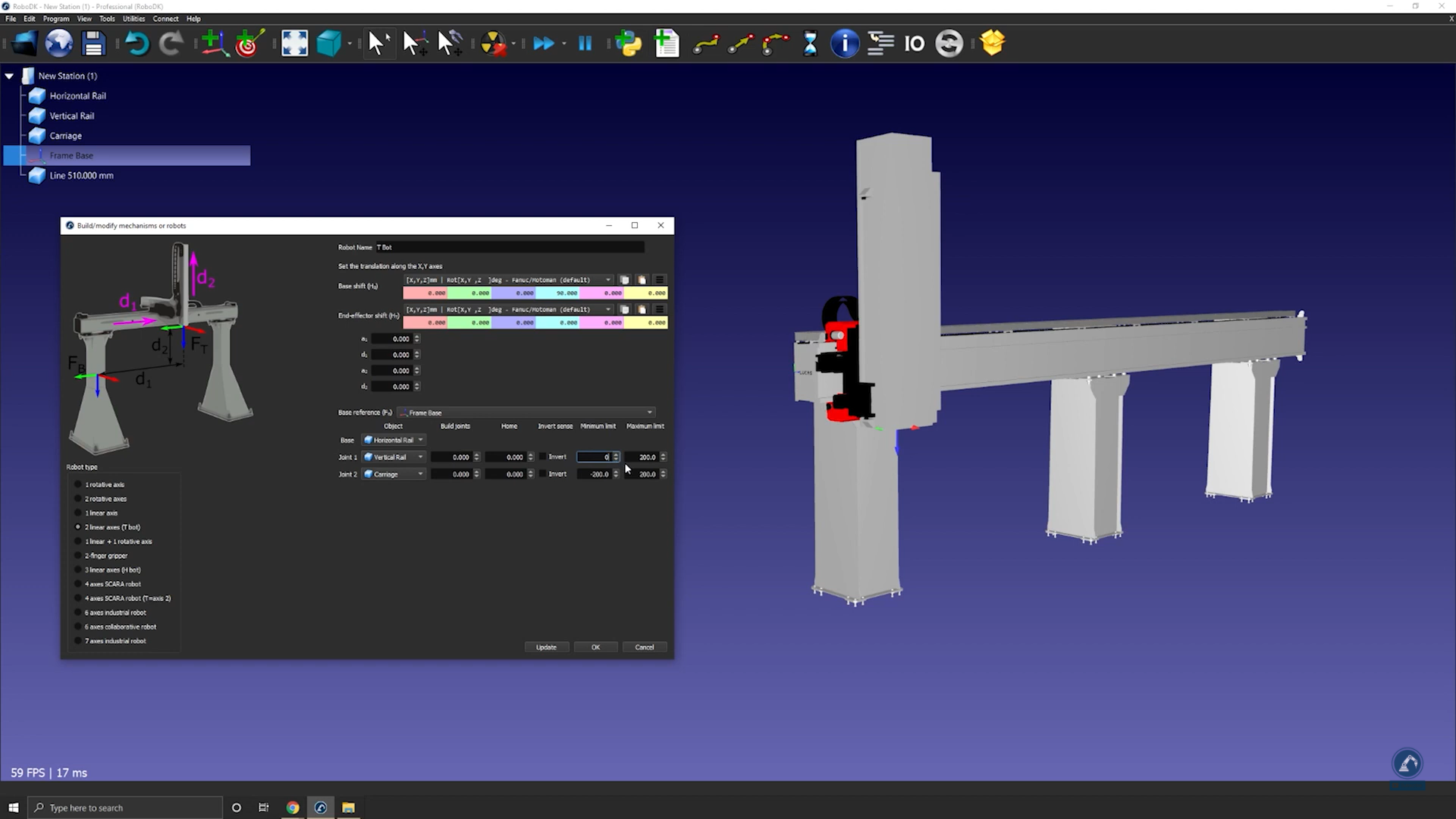
17.Selecione Atualizar para criar o robô.
18.Se Você estiver satisfeito com os resultados, selecione Ok na janela "Modelar mecanismo ou Robô".
Como modelar um robô cartesiano de três eixos
O vídeo a seguir mostra como modelar um robô cartesiano de 3 eixos (H-bot). Os braços do robô podem ser montados em eixos externos para ampliar seu alcance.
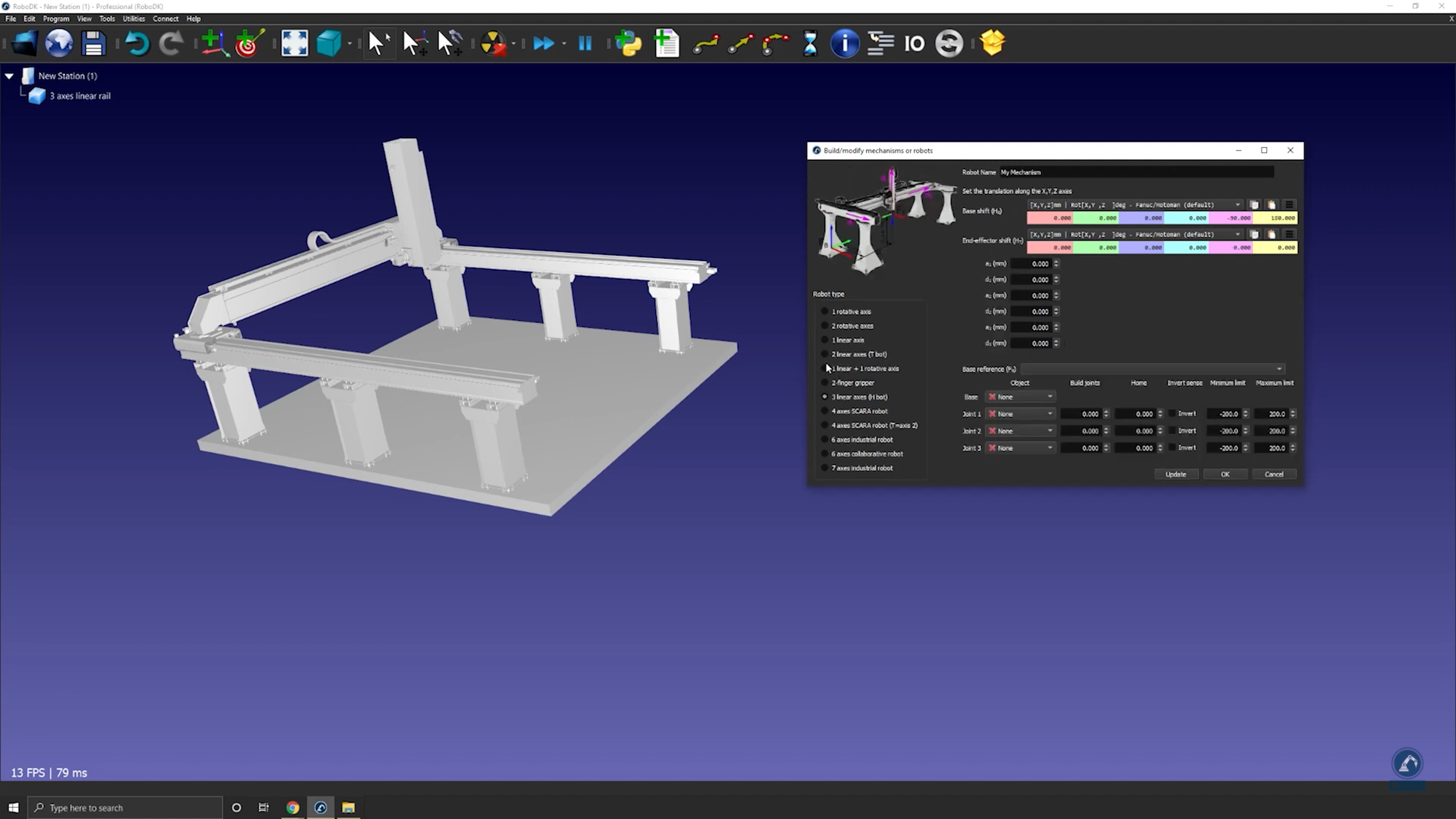
Siga estas etapas para configurar seu modelo 3D no RoboDK:
1.Arraste e solte o modelo 3D (como um arquivo STEP ou IGES) no RoboDK para carregá-lo em sua estação.
2.Abra o construtor de mecanismos: selecione Utilitários➔ Modelar mecanismo ou Robô
3.Em Tipo de robô, selecione 3 Eixos lineares(H-bot).
Siga estas etapas para criar seu Base Frame:
4.Quando o objeto estiver dividido em diferentes partes, abra novamente o construtor de trilhos (selecione Utilitários➔ Modelar Mecanismo ou Robô➔ 3 Eixos lineares).
5.Renomeie seu robô em Nome do robô.
6.Crie um frame de referência na posição 0 do trilho. Você pode renomeá-lo como Frame Base.
Siga estas etapas para modificar a posição da moldura:
7.Abra o painel de quadros clicando duas vezes em "Frame Base".
8.Abra a ferramenta de medição: Ferramentas ➔ Medição.
9.Selecione o ícone destacado abaixo na ferramenta de medição e, em seguida, selecione as duas bordas do objeto para encontrar a distância entre os dois pontos centrais.
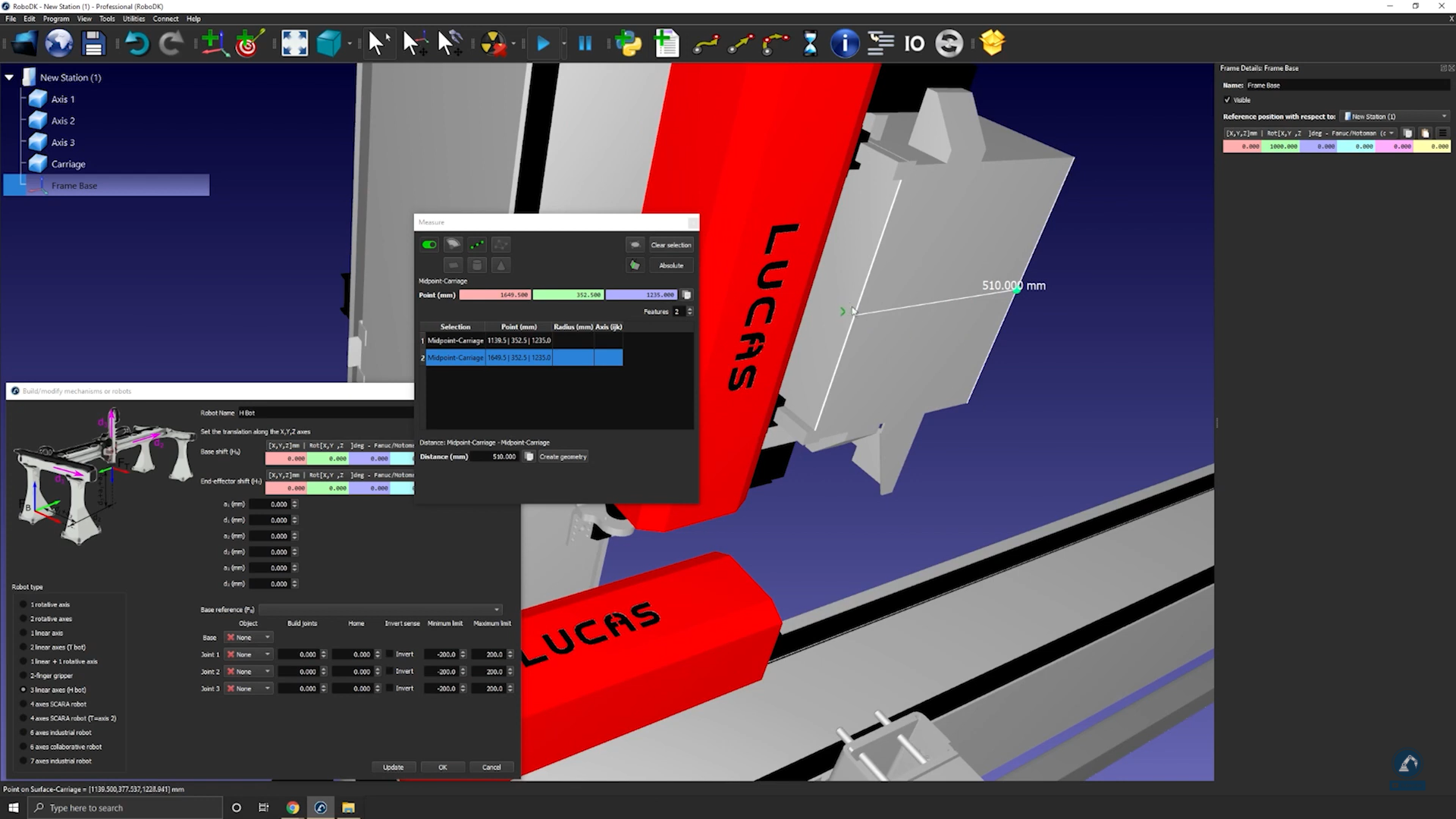
10.Selecione Criar geometria para criar uma linha entre os dois pontos centrais.
11.Agora que a linha entre os dois pontos foi criada, você pode selecionar Limpar Seleção.
12.Selecione o centro da linha para encontrar a medida do ponto central da linha recém-criada.
13.Copie os valores e cole-os como a posição do quadro (conforme mostrado na imagem abaixo) para garantir que a posição do quadro corresponda à imagem de referência.
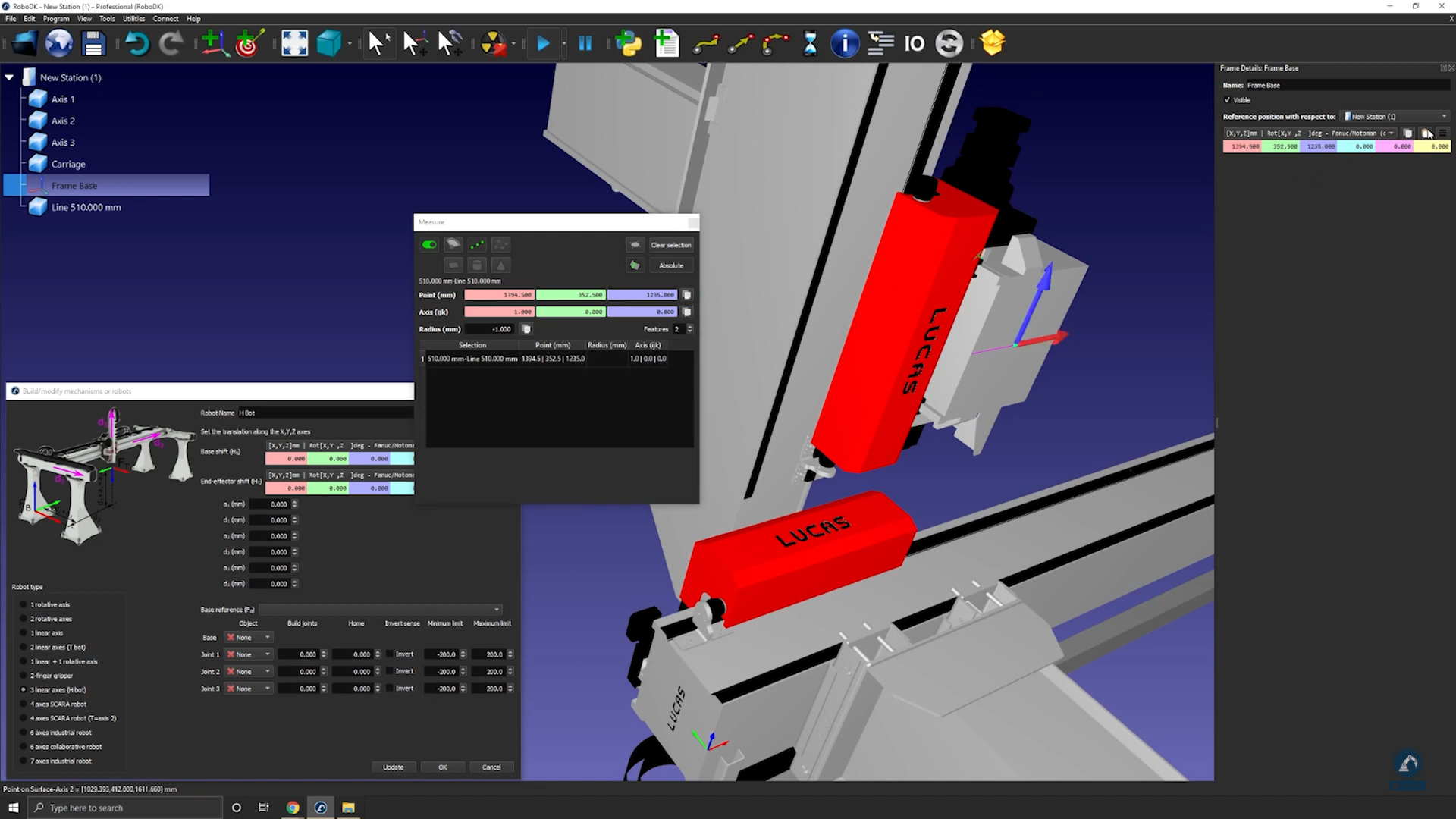
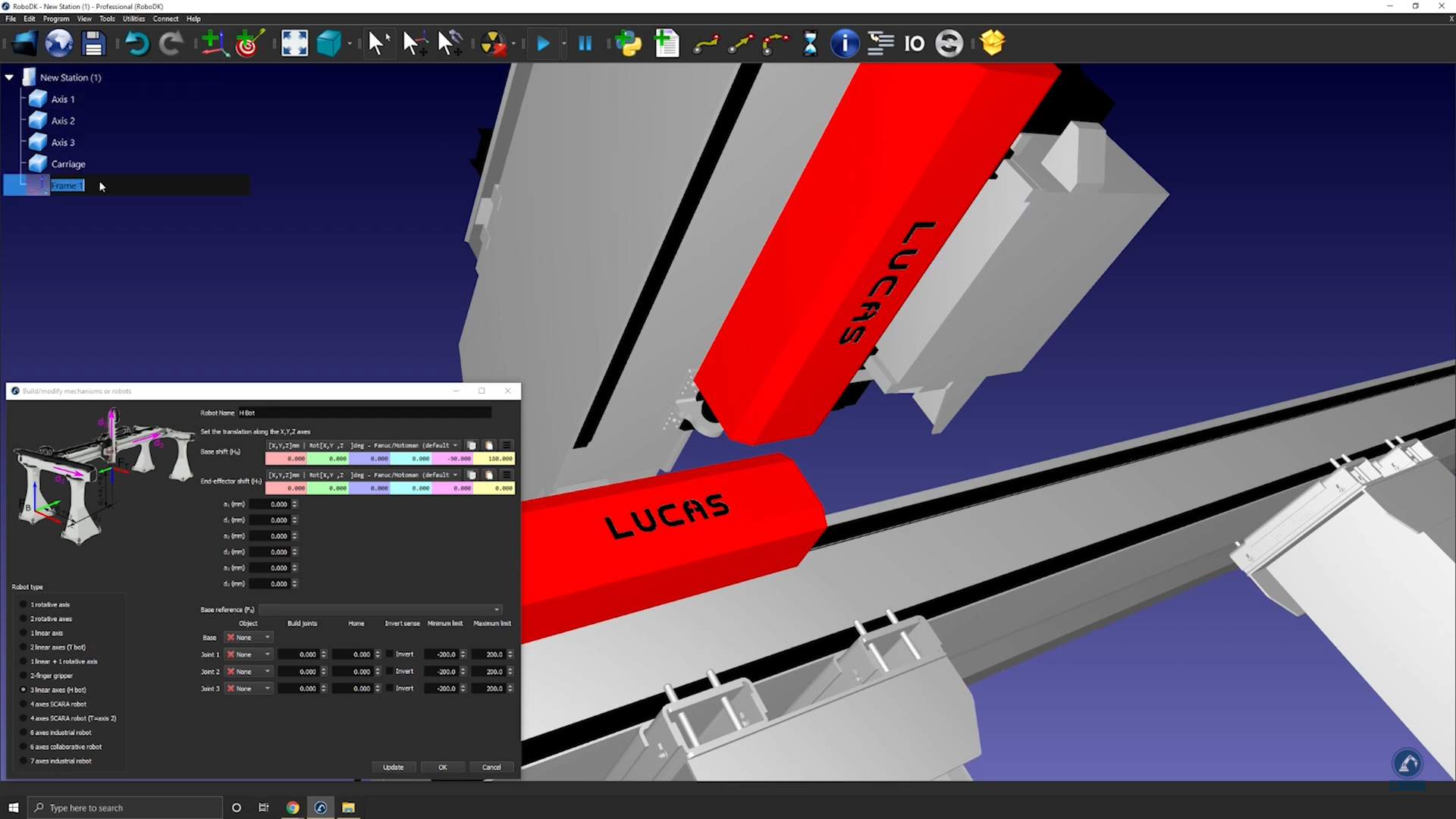
Siga estas etapas para garantir que as orientações sejam as mesmas:
14.Gire 90 graus no sentido anti-horário.
15.Selecione Frame Base e, em seguida, selecione os modelos 3D dos trilhos (selecione cada seção, uma a uma), conforme mostrado na imagem abaixo.
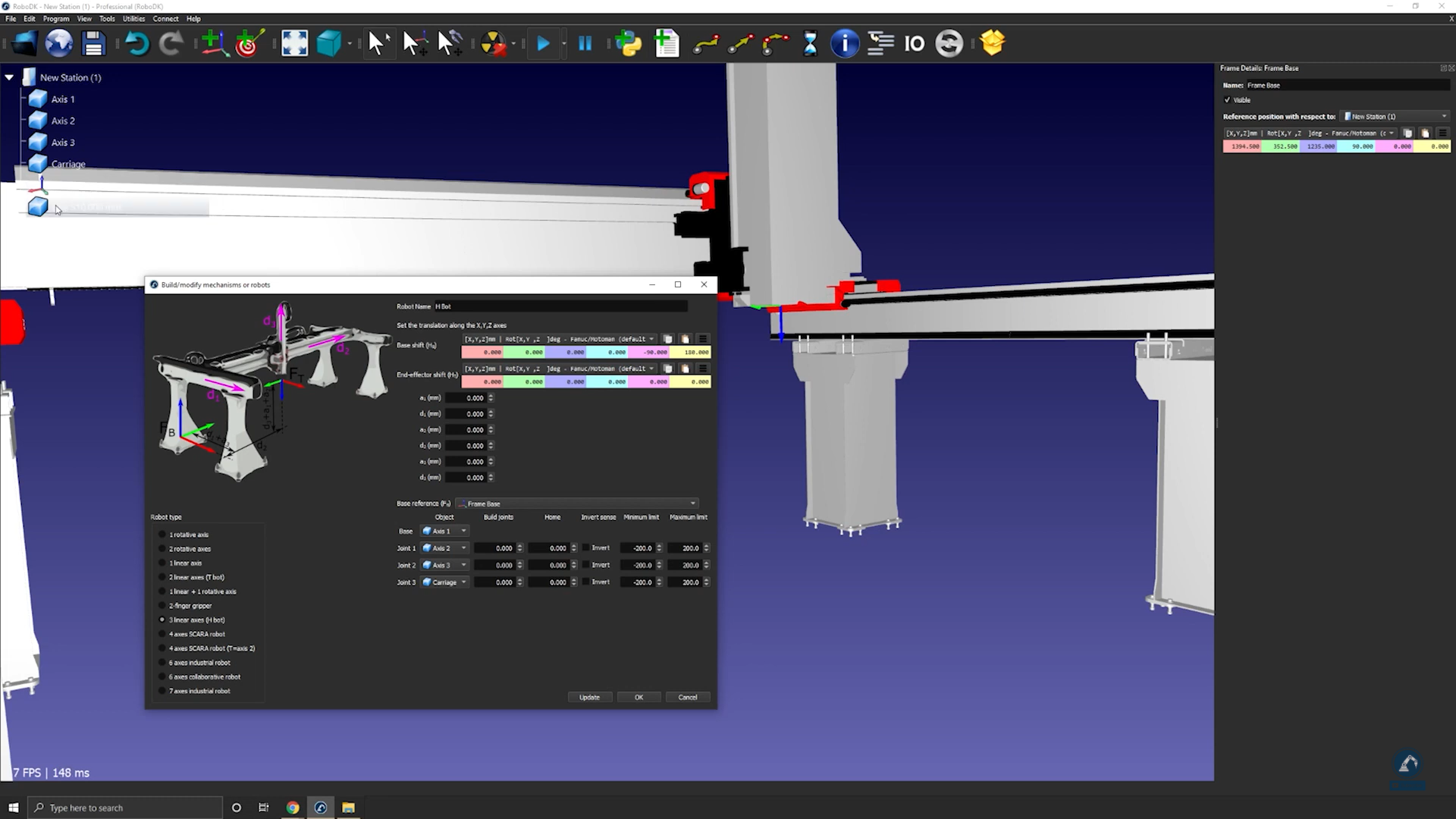
16.Digite o comprimento de cada trilho na seção de medidas.
17.Mova cado eixo em Mover eixos para garantir que cado eixo esteja se movendo bem.
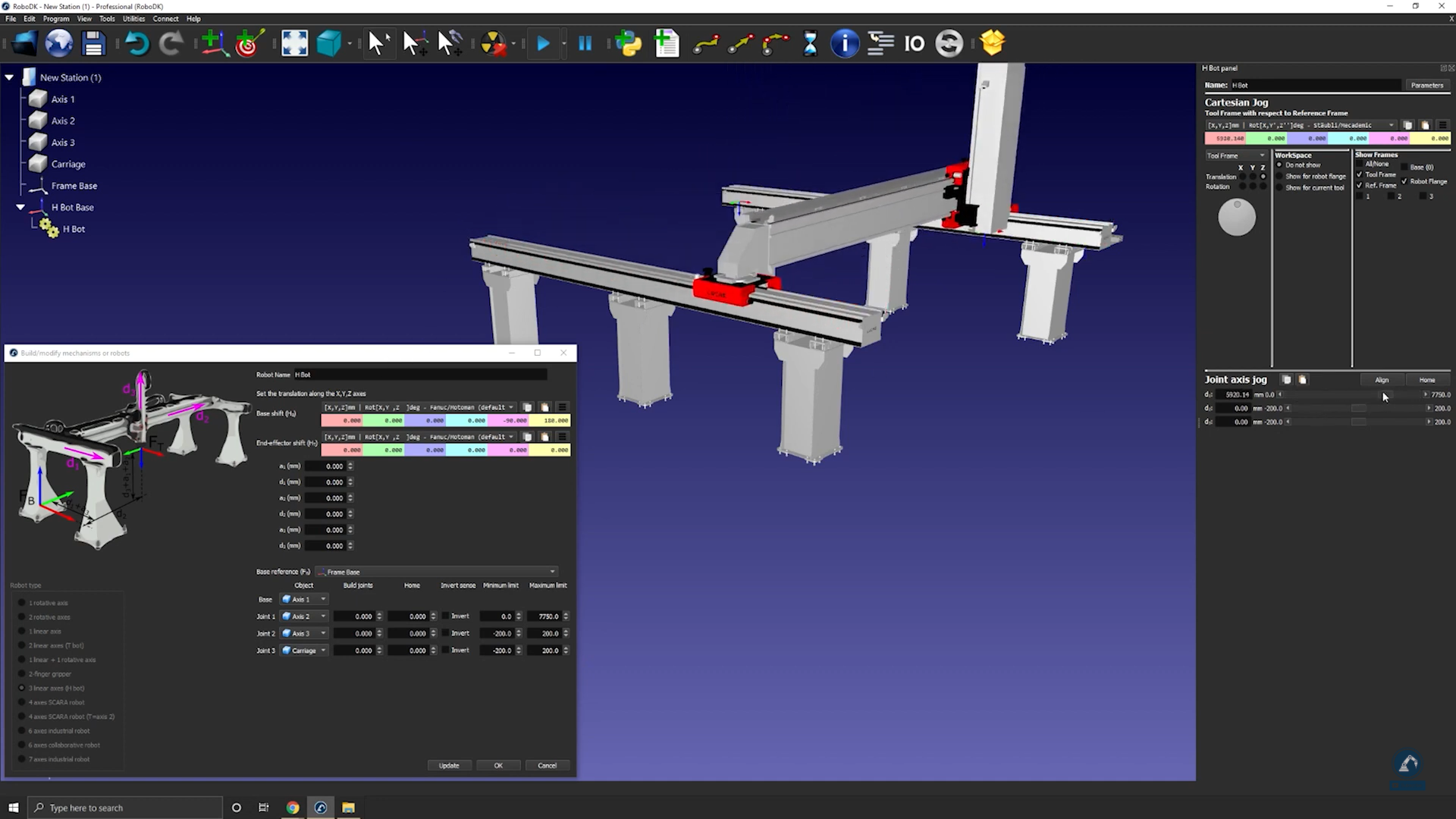
18.Pressione Atualizar depois de testar cado eixo para criar o robô.
19.Se estiver satisfeito com os resultados, você pode pressionar Ok na janela do mecanismo do modelo.
Como modelar uma garra paralela de dois dedos
Você pode modelar uma garra paralela no RoboDK usando a ferramenta Modelar Mecanismo ou Robô. As garras paralelas também são chamadas de garras de dois dedos e permitem que um robô agarre peças.
Siga estas etapas para configurar seu modelo 3D no RoboDK:
1.Importe seu modelo 3D: Arraste e solte seu arquivo STEP para carregá-lo em sua estação (arquivos IGES ou STL também funcionam).
2.Abra o construtor de mecanismos: Utilitários ➔ Modelar mecanismo ou Robô.
3.Selecione Garra de 2 dedos em "Tipo de robô".
4.Você pode renomear seu mecanismo como "Garra".
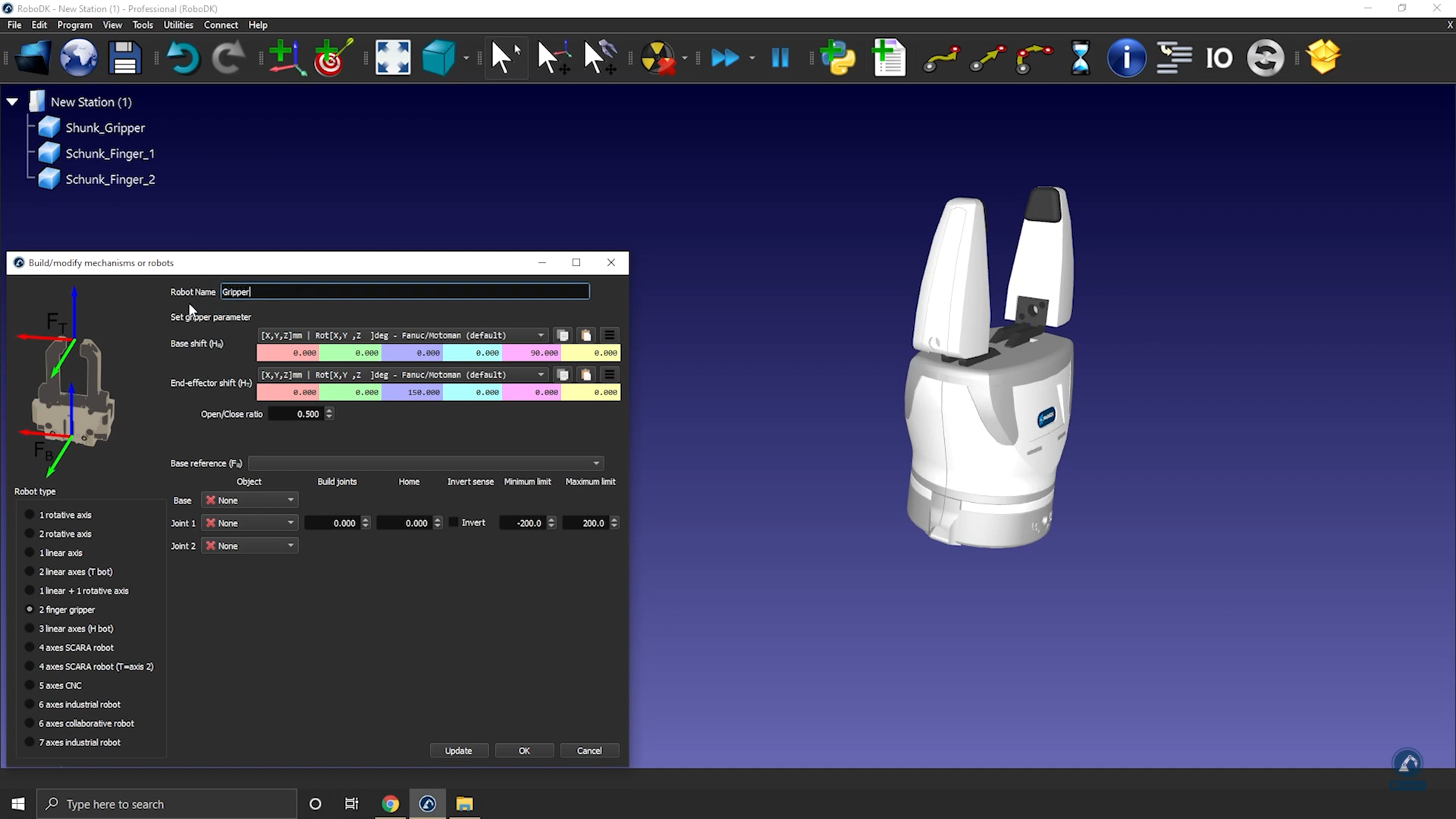
Siga estas etapas para posicionar sua estrutura de base:
5.Crie um frame de referência (ele deve estar abaixo da garra) e renomeie-o como Frame Base.
6.Certifique-se de que o quadro que você acabou de criar esteja posicionado de acordo com a imagem: Traga o frame de referência para 0,000 mm (X,Y,Z).
7.Digite a amplitude de movimento da garra: Se Você colocar os dedos na posição 0, o limite mínimo será 0 e o limite máximo será 80.
8.Selecione Atualizar.
9.Verifique se ele se move na direção correta e se os limites estão corretos usando o Mover eixos.
10.Se estiver satisfeito com os resultados, você pode pressionar Ok
Como modelar um braço robótico de seis eixos
Este exemplo mostra como modelar um braço de robô industrial de 6 eixos a partir do zero, usando os modelos 3D fornecidos pelo fabricante.
Siga estas etapas para reunir algumas informações sobre seu robô:
1.Em primeiro lugar, você precisa dos modelos 3D (como arquivos STEP ou IGES).
2.Você também precisará da folha de dados ou do manual do robô.
Siga estas etapas no RoboDK para abrir a janela do modelo do robô:
3.Selecione Utilitários➔ Modelar Mecanismo ou Robô.
4.Em Tipo de robô, selecione Robô industrial de 6 eixos.
Carregue os arquivos 3D do seu robô no RoboDK fazendo o seguinte:
5.Arraste e solte seu robô no RoboDK ou selecione o arquivo e abra-o (pode levar alguns segundos para carregar).
Siga estas etapas para dividir um objeto em diferentes partes para que possamos tratar cada parte separadamente:
6.Se o arquivo CAD que você baixou estiver em um único objeto, é possível desagrupar o objeto (arquivo STEP) clicando com o botão direito do mouse em qualquer objeto e selecionando Separar Objeto.
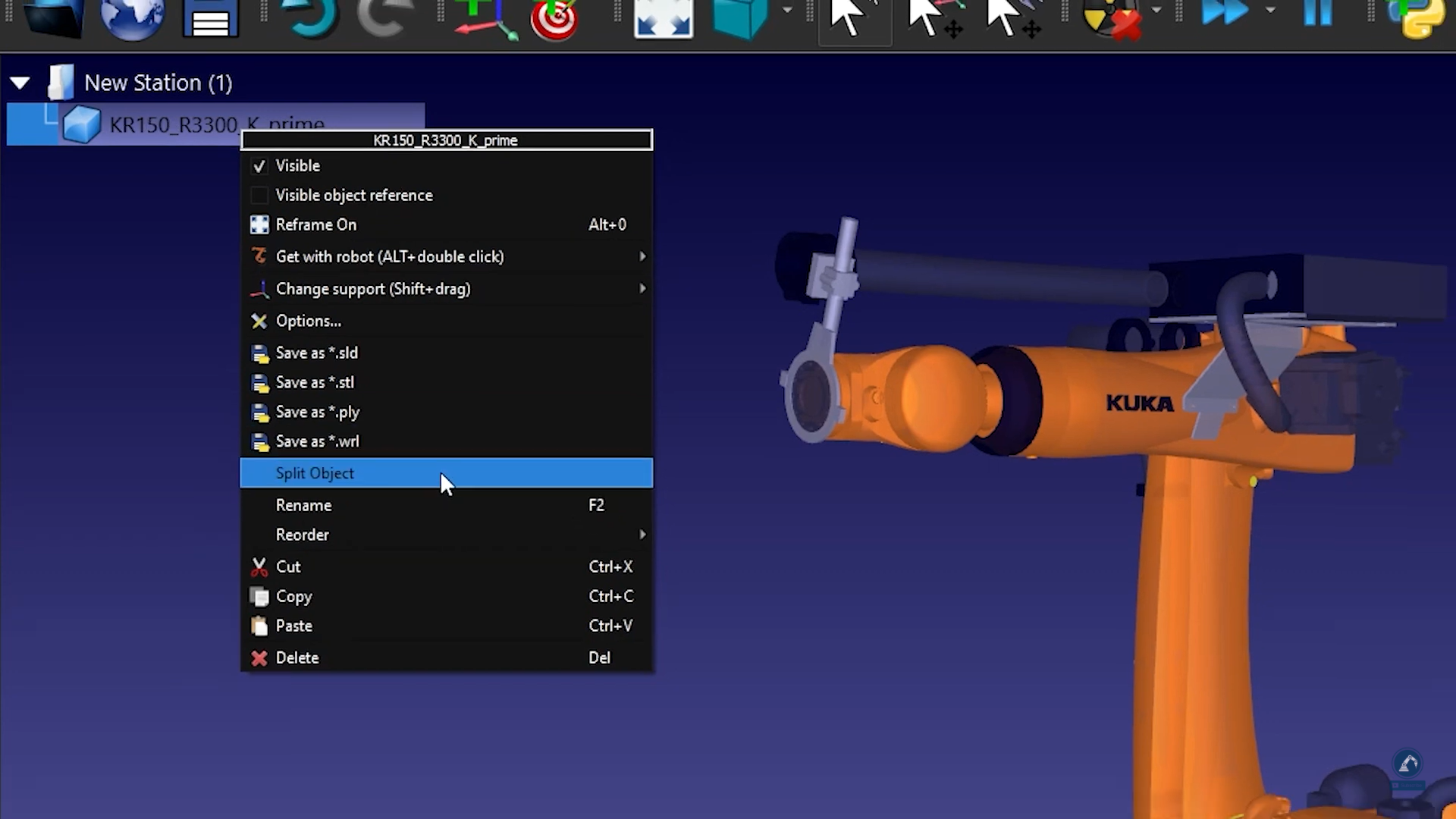
7.Em seguida, você pode reagrupá-las para criar as diferentes peças do robô.
Siga estas etapas para inserir as informações cinemáticas do robô no RoboDK:
8.Dê um nome ao seu robô inserindo-o em Nome do Robô.
9.Se as peças do seu robô estiverem na ordem correta, todos os modelos 3D deverão ser preenchidos corretamente. Caso contrário, você pode vincular manualmente cada objeto à articulação correta do robô.
10.Preencha as dimensões do robô abrindo a folha de dados.
11.No esboço 3D da folha de dados, você encontrará todos os valores que está procurando. Preencha os valores corretos no RoboDK.
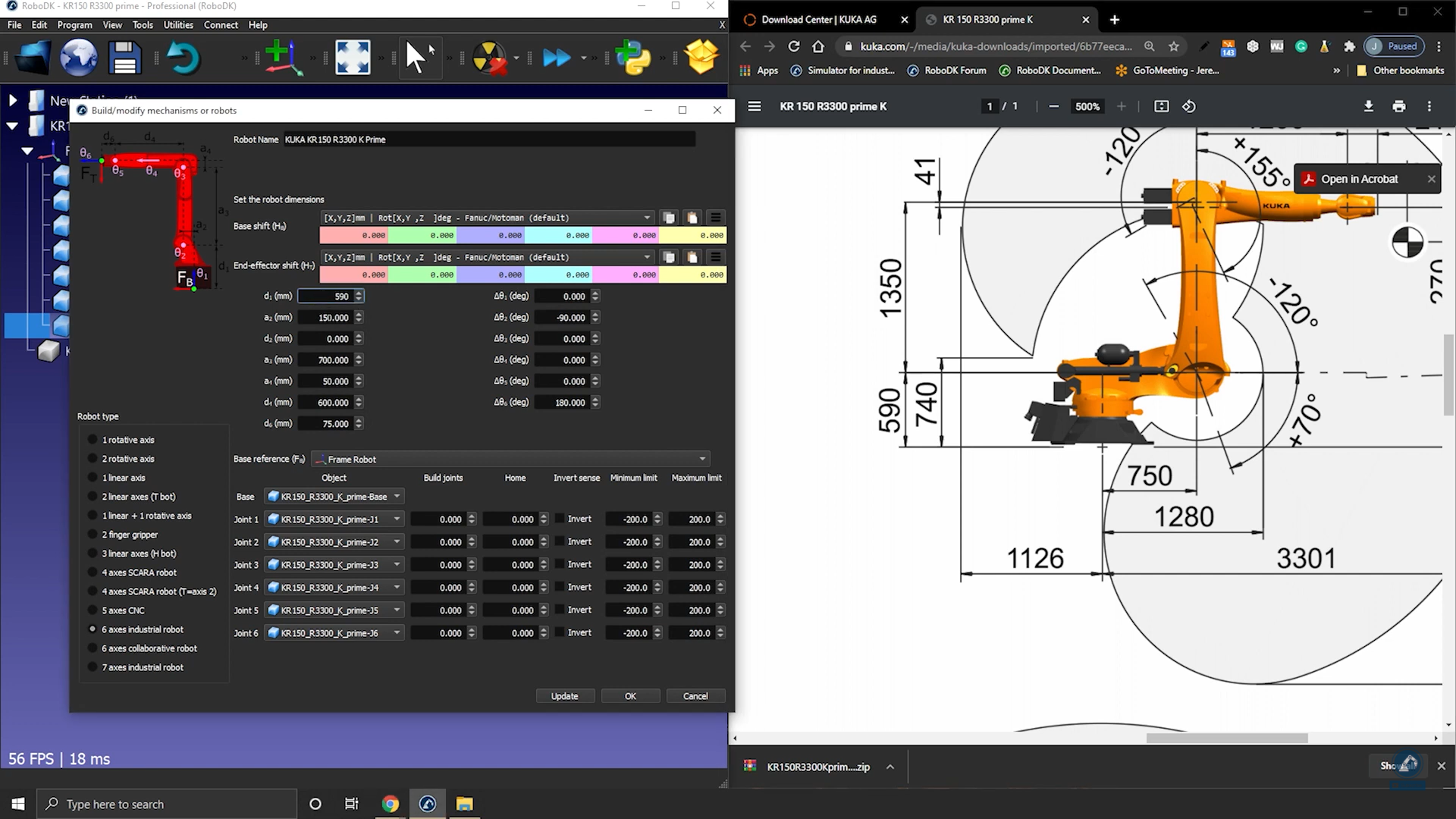
12.Quando Você estiver satisfeito com o resultado da cinemática do robô, selecione Atualizar.
Como acoplar eixos de robôs
Alguns robôs têm duas articulações acopladas, o que significa que dois dos valores de eixo do robô são dependentes. Por exemplo, os robôs Fanuc têm o eixo 2 e o eixo 3 acoplados.
Siga estas etapas para acoplar as articulações de seu robô no RoboDK:
1.Primeiro, clique duas vezes no robô para abrir o painel do robô.
2.Clique em Parâmetros para abrir a guia Parâmetros do robô
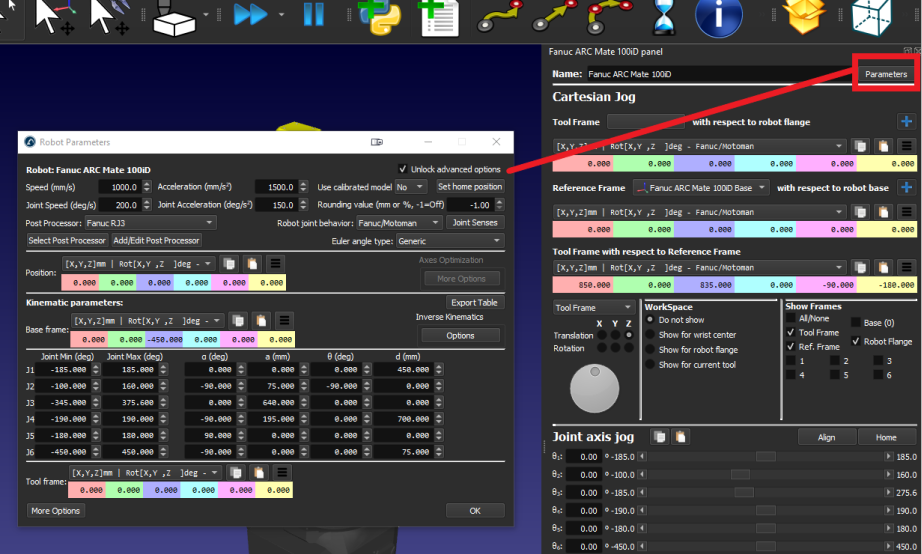
3.Marque a caixa Desbloquear opções avançadas.
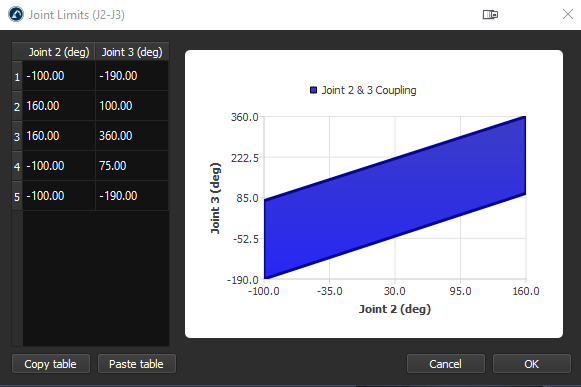
Clique em Sentidos da articulação para abrir a guia Sentido do eixo da articulação. Os primeiros 6 valores representam a direção de giro das articulações e o último valor é o acoplamento das articulações 2 e 3. Altere o 7º valor para -1 para vincular as articulações. Uma nova guia com o polígono de limite do eixo de acoplamento será aberta; você pode editar os limites para evitar que o robô colida consigo mesmo.
Sincronizar eixos adicionais
É possível sincronizar um braço de robô com eixos externos adicionais. Os eixos externos podem ser usados simplesmente como um posicionador ou também podem ser sincronizados com o mesmo controlador do robô. Quando os eixos externos são sincronizados, o robô e os eixos podem se mover ao mesmo tempo, mantendo movimentos lineares precisos em relação a um sistema de coordenadas.
Você pode sincronizar até 6 eixos adicionais com qualquer robô usando o RoboDK. Se Você estiver usando um robô de 6 eixos, isso significa que pode ter um sistema combinado com 12 eixos.
Para sincronizar um braço de robô com eixos externos:
1.Carregue seu eixo adicional de nossa biblioteca ou modele-o como um novo mecanismo.
2.Construa uma estação RoboDK colocando o robô e os eixos/mecanismos em seus respectivos locais.
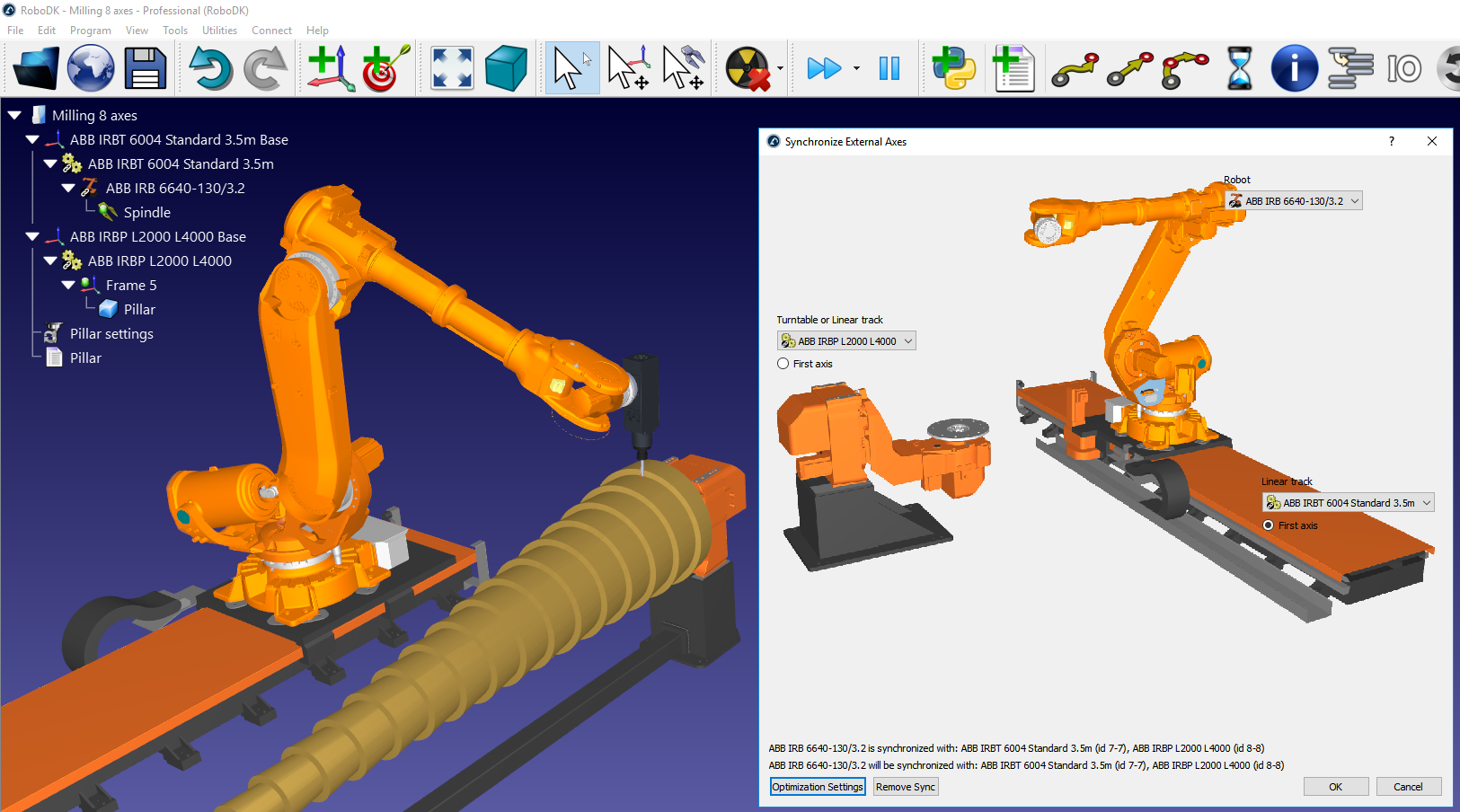
3.Selecione Utilitários ➔ Sincronizar eixos externos.
4.Selecione o robô e a plataforma giratória e/ou o trilho linear disponíveis estarão disponíveis para sincronização com o robô.
5.Selecione OK. Um novo painel do robô será aberto, mostrando os eixos adicionais em azul.
Os pontos relacionados a esse robô sincronizado mostrarão valores adicionais de articulação em azul. É possível especificar a posição preferencial de um posicionador quando um programa é gerado. Os pontos cartesianos manterão a posição cartesiana fornecida enquanto os eixos externos são movidos ao longo do caminho.
Todas as configurações de usinagem do robô mostrarão opções adicionais para fornecer a posição preferencial dos eixos externos. Além disso, cada movimento exportado pelo pós-processador incluirá a posição dos eixos externos.
Otimizar eixos externos
Quando Você tem um ou mais eixos adicionais sincronizados com o seu robô, pode priorizar a movimentação de determinados eixos e otimizar seus projetos de usinagem de robôs, projetos de seguimento de curvas/pontos e projetos de impressão 3D de acordo com seus critérios preferidos.
Selecione Mais opções na seção Otimização de eixos do projeto de usinagem do robô para ver as opções de otimização de eixos externos.
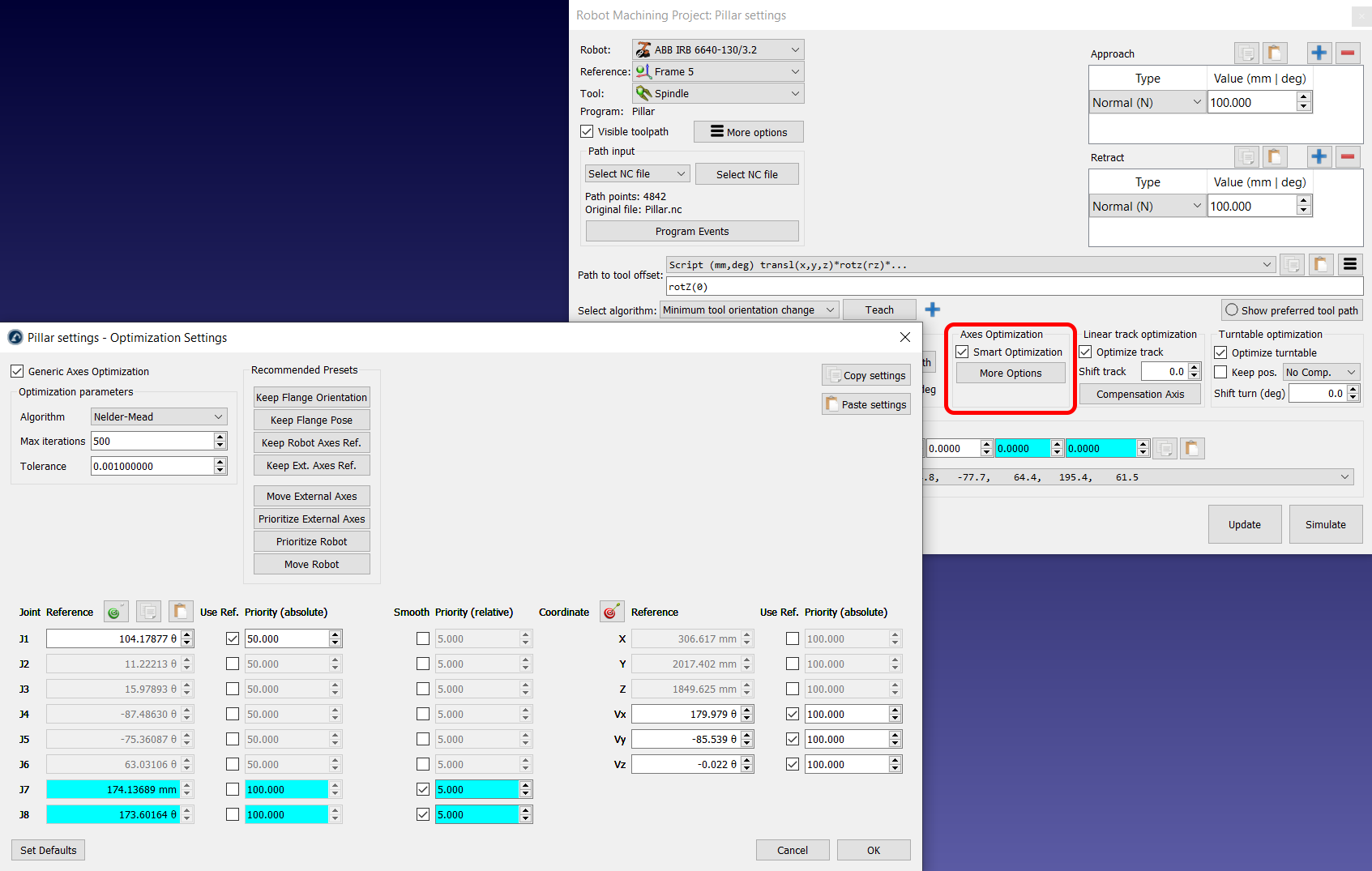
Você pode fornecer prioridade diferente de acordo com os seguintes critérios:
●Atualizar eixos de referência: Você pode impor uma posição de eixo desejada para algumas (ou todas) articulações. Um peso maior significa que é mais provável que o valor de referência corresponda a qualquer momento durante o programa.
●Minimizar o movimento (igualar a posição anterior): Você pode impor uma "penalidade" ao movimento abrupto de determinados eixos (movimento relativo).
●Manter pose de referência: Você pode impor uma pose absoluta desejada para o robô manter. A pose de referência é a pose do flange do robô que você deseja manter em relação à base estática do robô. A restrição de orientação tentará combinar os vetores X, Y e Z da pose do flange do robô de acordo com a pose de referência.
Por exemplo, se você selecionar a predefinição Manter Orientação da Flange, o RoboDK priorizará a manutenção da orientação do flange do robô para corresponder à pose do robô que você tinha na simulação quando selecionou essa predefinição (a seleção dessa predefinição atualiza a pose de referência). Além disso, se você quiser que o valor da articulação 1 do robô permaneça próximo a 105 graus, poderá ativar essa prioridade.
Se Você selecionar a predefinição Manter Referência do Robô, verá que a referência de posição é atualizada para corresponder à posição atual dos eixos do robô. Você também verá que os valores de eixo do robô têm um determinado peso (100), enquanto os eixos externos não têm peso (sem preferência). Por outro lado, os eixos externos terão um peso pequeno (5) para evitar que façam movimentos bruscos ou indesejados.
Você pode alterar essas configurações para obter o efeito desejado depois de atualizar o projeto de usinagem do robô.