Primeiros passos
O senhor pode criar facilmente um novo programa que aproxime o robô da peça com segurança.
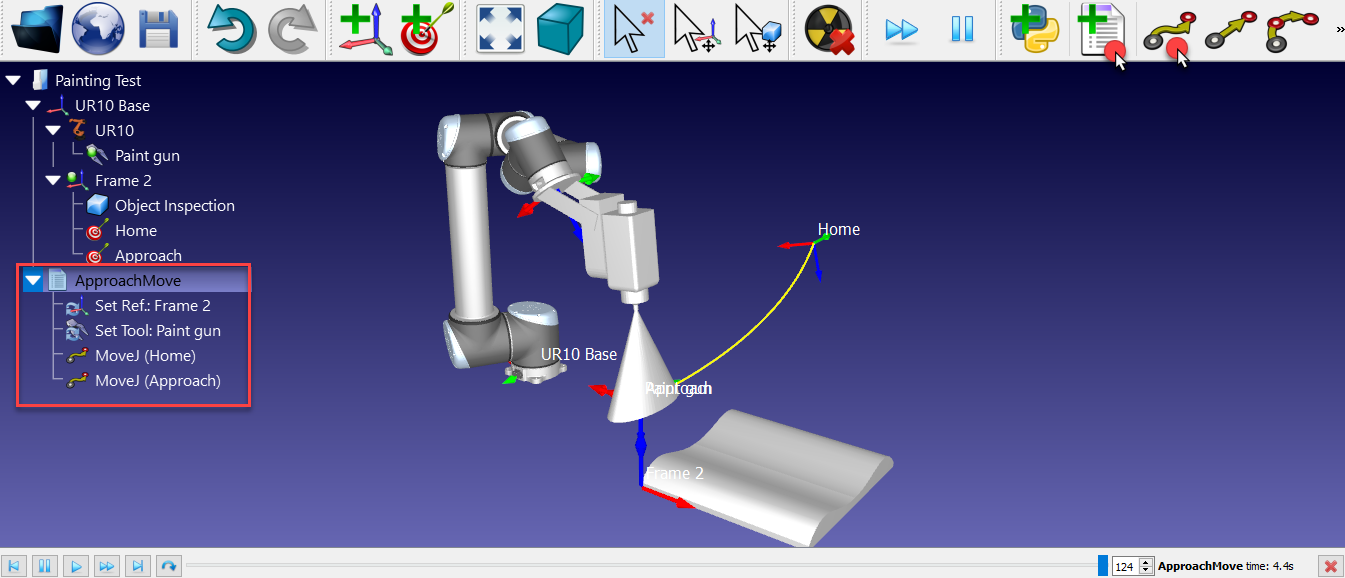
Siga estas etapas para criar um programa que se mova do alvo Home para o alvo Approach:
1.Selecione Program➔![]() Add Program no menu ou o botão correspondente na barra de ferramentas (como mostrado na próxima imagem).
Add Program no menu ou o botão correspondente na barra de ferramentas (como mostrado na próxima imagem).
2.Renomeie o programa para ApproachMove.
3.Selecione o destino Home.
4.Selecione Program➔![]() Move Joint Instruction (ou o botão correspondente na barra de ferramentas)
Move Joint Instruction (ou o botão correspondente na barra de ferramentas)
Duas instruções serão adicionadas automaticamente para informar ao robô qual quadro de ferramentas e quadros de referência estamos usando.
5.Selecione o alvo da abordagem
6.Selecione Program➔![]() Move Joint Instruction novamente.
Move Joint Instruction novamente.
Clique duas vezes no programa ApproachMove e ele executará a simulação do programa. A barra de simulação e o tempo de ciclo estimado serão exibidos.