Primeiros passos
O senhor pode criar facilmente um novo programa que retraia com segurança o robô da peça para uma posição segura.
Semelhante às operações anteriores:
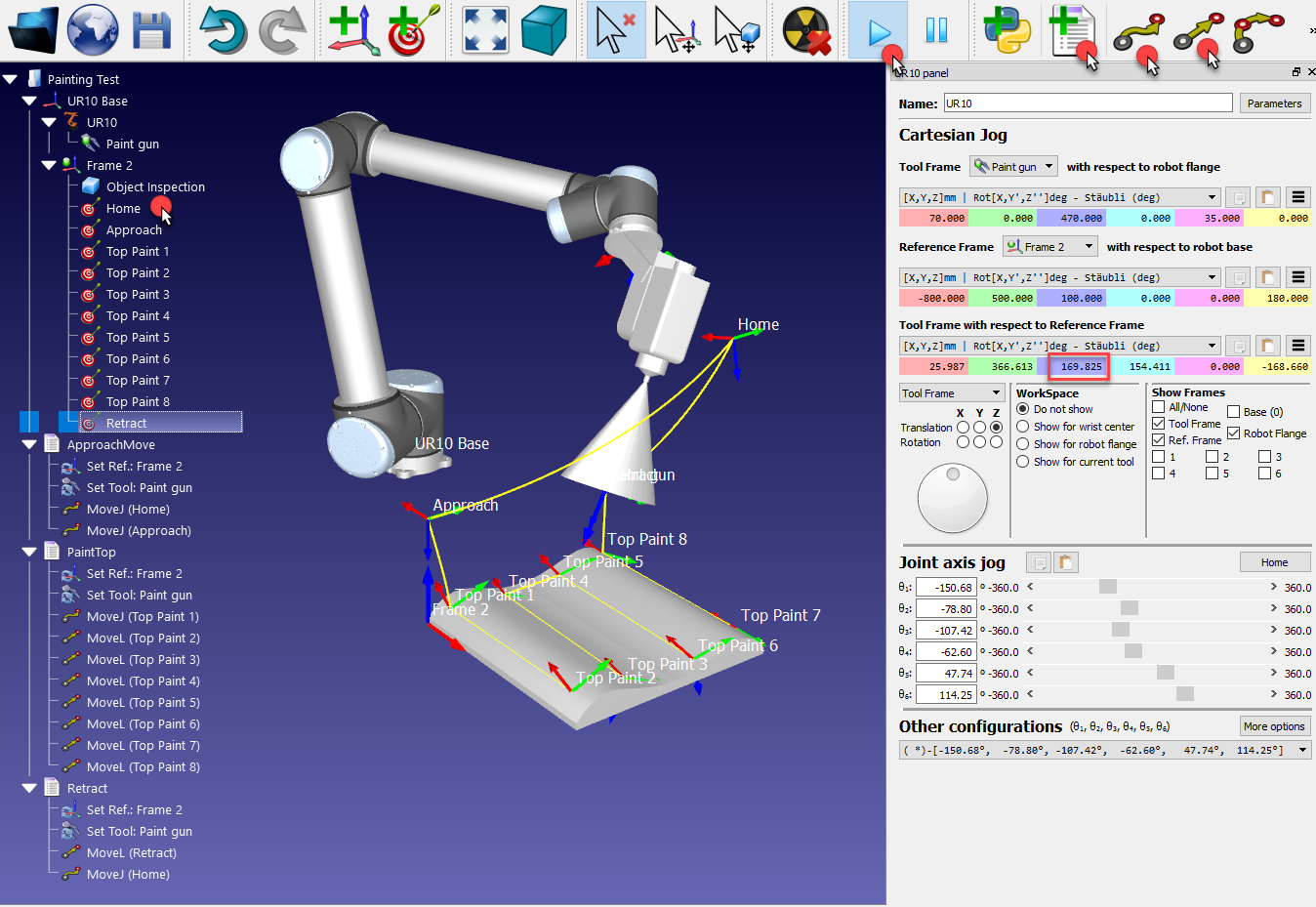
1.Com o robô posicionado no último alvo, mova o robô para cima aumentando a coordenada Z do TCP em relação ao quadro de referência no painel do robô (caso destacado na próxima imagem).
2.Selecione Program➔![]() Add Program ou o botão apropriado na barra de ferramentas.
Add Program ou o botão apropriado na barra de ferramentas.
3.Selecione Program➔![]() Move Linear Instruction ou o botão apropriado na barra de ferramentas
Move Linear Instruction ou o botão apropriado na barra de ferramentas![]() . Renomeie-a para Retract pressionando a tecla F2.
. Renomeie-a para Retract pressionando a tecla F2.
4.Selecione o alvo Home
5.Selecione Program➔![]() Move Joint Instruction. Uma nova instrução de movimentação será adicionada, vinculada ao alvo Home.
Move Joint Instruction. Uma nova instrução de movimentação será adicionada, vinculada ao alvo Home.
Simule cada programa individualmente clicando duas vezes nele. A simulação pode ser acelerada mantendo pressionada a barra de espaço ou selecionando o botão Fast Simulation (Simulação rápida) / .![]()
![]()