Adicionar um frame de referência
Um frame de referência (ou também chamado de sistema de coordenadas) permite posicionar objetos em relação a um robô ou em relação a outros objetos no espaço 3D (incluindo posição e orientação).
Siga estas etapas para adicionar um novo frame de referência:
1.Selecione Programa ➔
Como alternativa, selecione o botão equivalente na barra de ferramentas
2.Clique duas vezes no frame de referência (na árvore ou na geometria 3D na tela principal) para inserir as coordenadas mostradas na imagem (posição X,Y,Z e ângulos de Euler para a orientação). A roda do mouse pode ser usada na parte superior de cada caso para atualizar rapidamente a posição do frame de referência na tela principal.
As seguintes cores são usadas por padrão:
●Coordenada X➔ Vermelho.
●Coordenada Y➔ Verde.
●Coordenada Z➔ Azul.
●1ª rotação de Euler➔ Ciano.
●2ª rotação de Euler➔ Magenta.
●3ª rotação de Euler➔ Amarelo.
3.Selecione Visualizar ➔ Aumentar Frames de Referência (+) para aumentar o tamanho dos frames de referência.
4.Selecione Visualizar ➔ Diminuir Frames de Referência (-) para diminuir o tamanho dos frames de referência.
5.Selecione Visualizar ➔ Exibir/Ocultar o texto na tela (/) para mostrar ou ocultar o texto na tela.
6.Opcionalmente, renomeie qualquer frame de referência ou objeto na árvore selecionando F2.
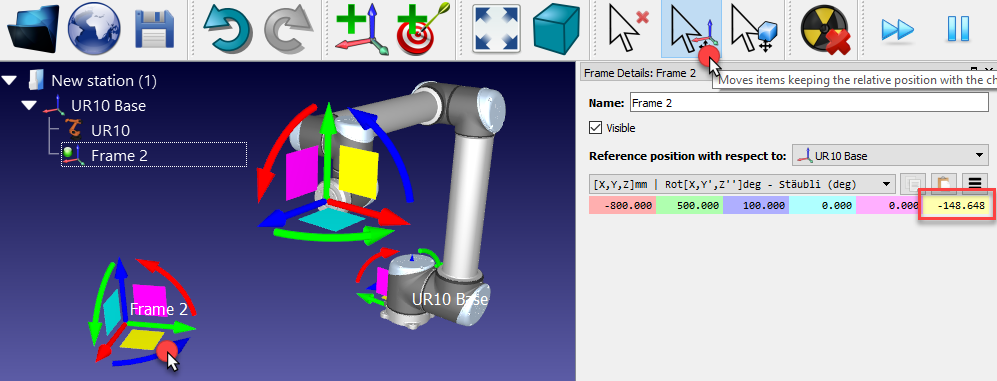
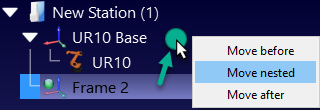
Se mais de um frame de referência for usado, é possível arrastá-los e soltá-los dentro da Árvore de estações para corresponder à dependência existente na configuração real. Por exemplo, o Frame de referência 2 pode ser colocado em relação à referência da base do robô. Nesse caso, se a referência da base UR10 for movida, o Frame 2 também será movido com ela. É importante levar isso em conta se outros robôs ou frames de referência forem usados. A próxima imagem mostra a diferença na dependência.
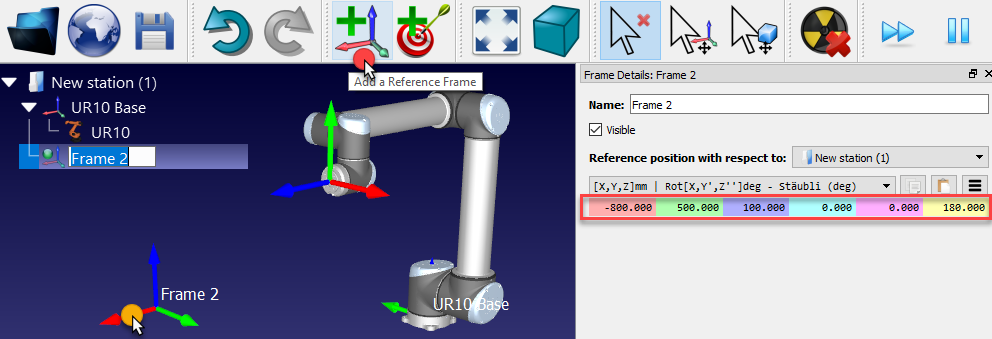
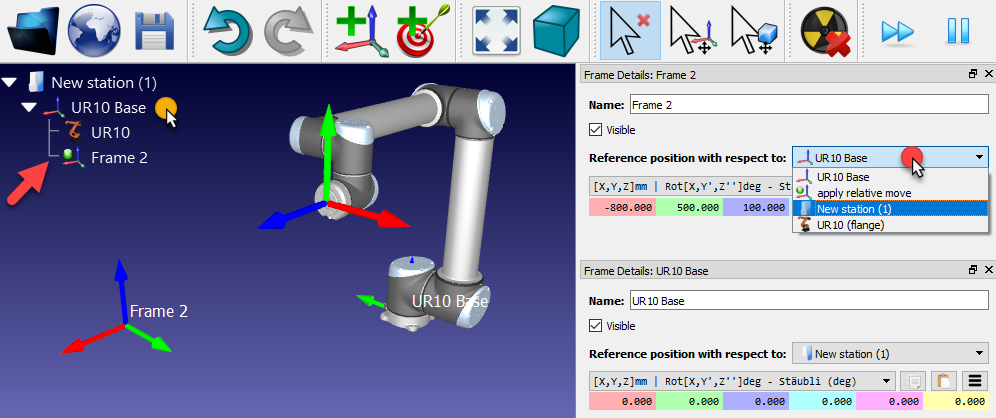
Mesmo que a dependência seja diferente, ainda é possível inserir ou recuperar as coordenadas de qualquer frame de referência em relação a qualquer outro frame de referência, conforme mostrado na próxima imagem. A maioria dos controladores de robôs exige as coordenadas do frame de referência em relação ao frame de base do robô.
Os frames de referência também podem ser movidos na tela principal, mantendo pressionada a tecla Alt ou selecionando o botão correspondente na barra de ferramentas