Adicione um programa de retração
Você pode criar facilmente um novo programa que retraia com segurança o robô da peça para uma posição segura.
Semelhante às operações anteriores:
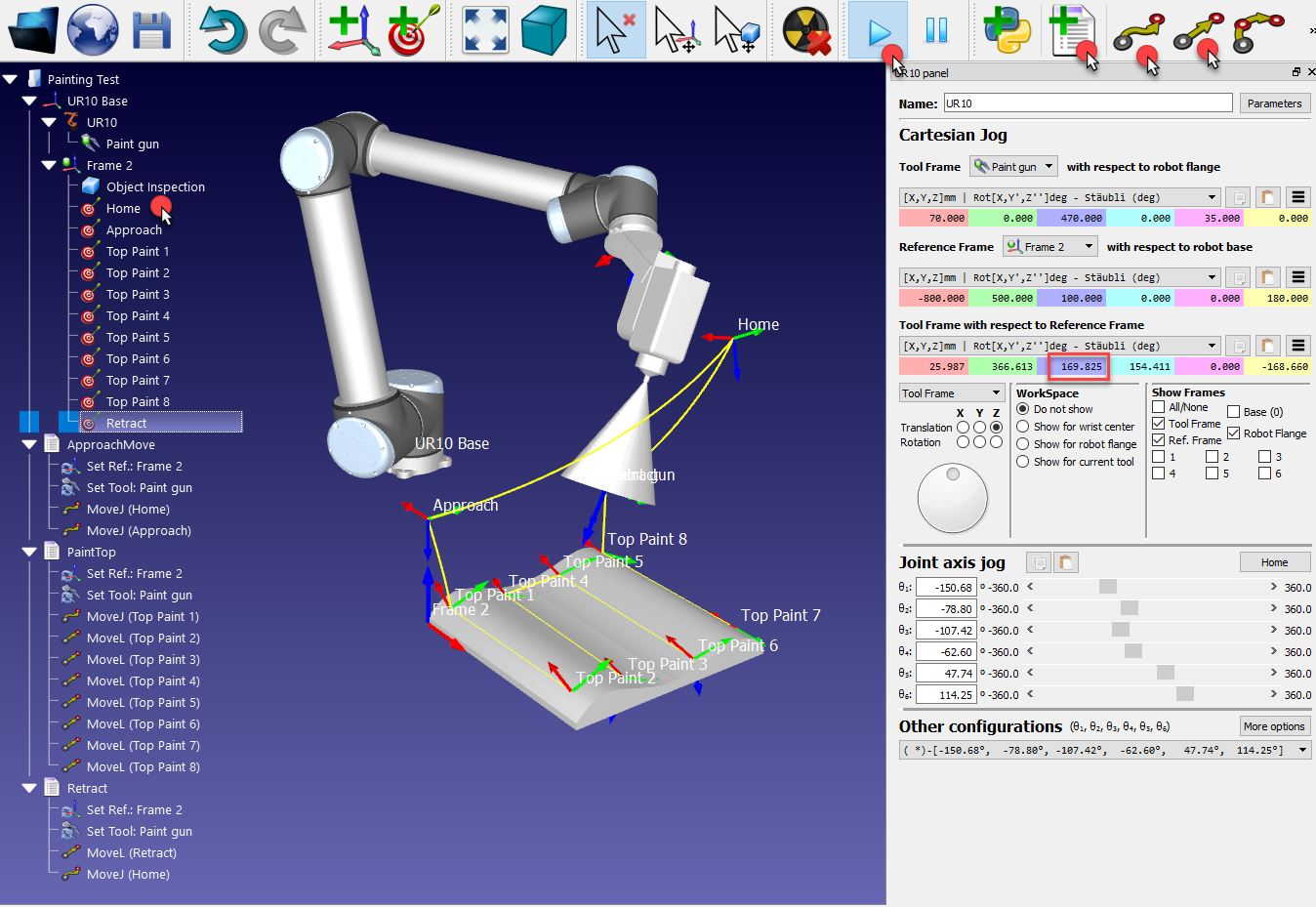
1.Com o robô posicionado no último ponto, mova o robô para cima aumentando a coordenada Z do TCP em relação ao frame de referência no painel do robô (caso destacado na próxima imagem).
2.Selecione Programa ➔
3.Selecione Programa ➔

4.Selecione o ponto Home
5.Selecione Programa ➔
Simule cada programa individualmente clicando duas vezes nele. A simulação pode ser acelerada mantendo pressionada a barra de espaço ou selecionando o botão Fast Simulation (Simulação rápida) / .