Criar uma ferramenta
Novas ferramentas do robô (TCPs) podem ser carregadas ou criadas no RoboDK a partir da geometria 3D carregada anteriormente.
Siga estas etapas para carregar um objeto e configurá-lo como uma ferramenta do robô:
1.Selecione Arquivo ➔
2.Selecione o arquivo Paint gun.stl para adicioná-lo como um objeto (ele será adicionado no frame da base do robô)
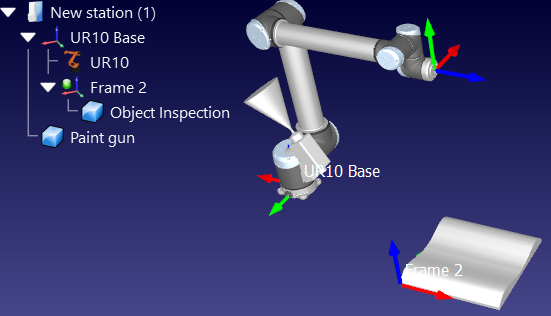
3.Arraste e solte o objeto para o item do robô dentro da árvore de estações, conforme mostrado na próxima imagem
Novas ferramentas podem ser carregadas ou salvas no formato .tool.
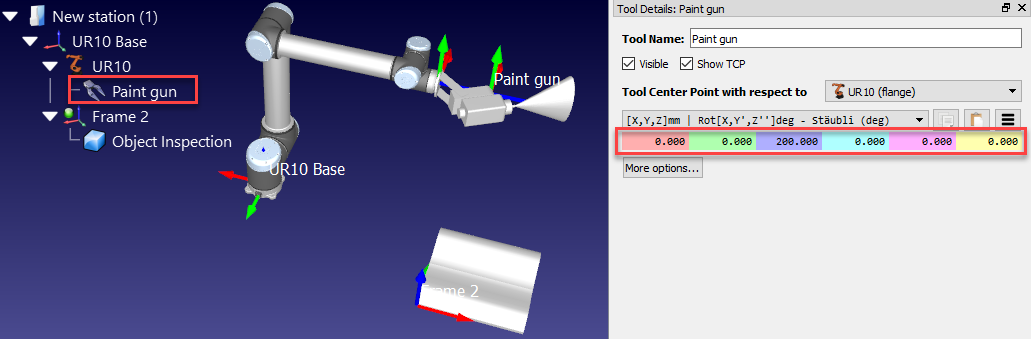
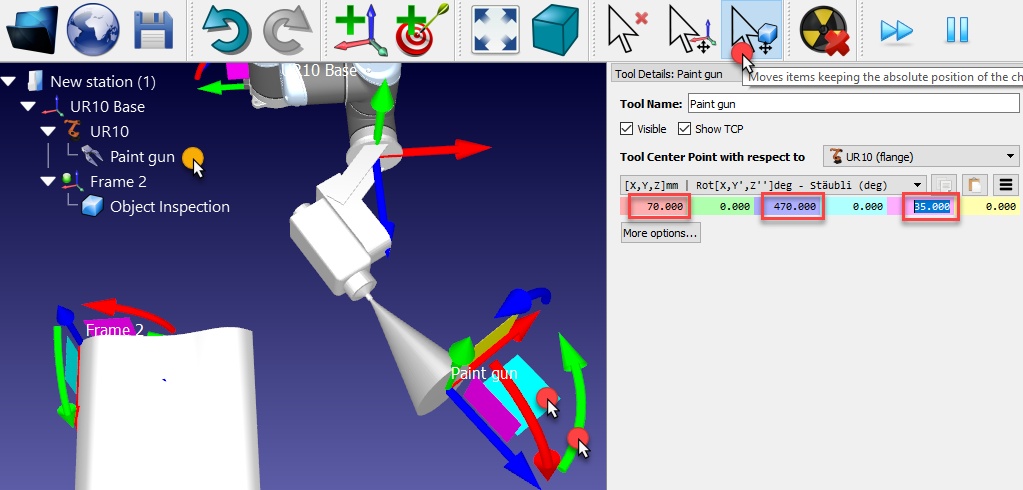
Por padrão, o RoboDK definirá o TCP na posição [X,Y,Z]=[0,0,200] mm. Isso pode ser alterado inserindo as coordenadas manualmente e/ou movendo o TCP segurando a tecla ALT+Shift, conforme mostrado na próxima imagem:
1.Mantenha pressionado ALT+Shift ou selecione o botão destacado na barra de ferramentas
2.Selecione o plano azul claro (plano XZ do TCP) e arraste o TCP aproximadamente em direção à superfície da pistola de pulverização, conforme mostrado na próxima imagem
3.Selecione a seta arredondada verde (rotação em torno do eixo Y) para fazer com que o eixo Z aponte para fora
4.Depois de obter uma estimativa das coordenadas, é possível retocar esses valores manualmente clicando duas vezes no objeto da pistola de pintura. A roda do mouse pode ser usada em cima de cada caso para atualizar rapidamente a posição na tela principal.
Nesse ponto, a estação pode ser salva:
1.Selecione Arquivo ➔
2.Salve o arquivo como Paint Test.rdk. O título da janela e o nome da estação serão atualizados
Definir um TCP relativo
Você pode fazer referência a uma ferramenta (TCP) em relação a outra, por exemplo, para definir um determinado afastamento ou para posicionar uma fresa em relação a uma referência ou a um suporte de ferramenta.
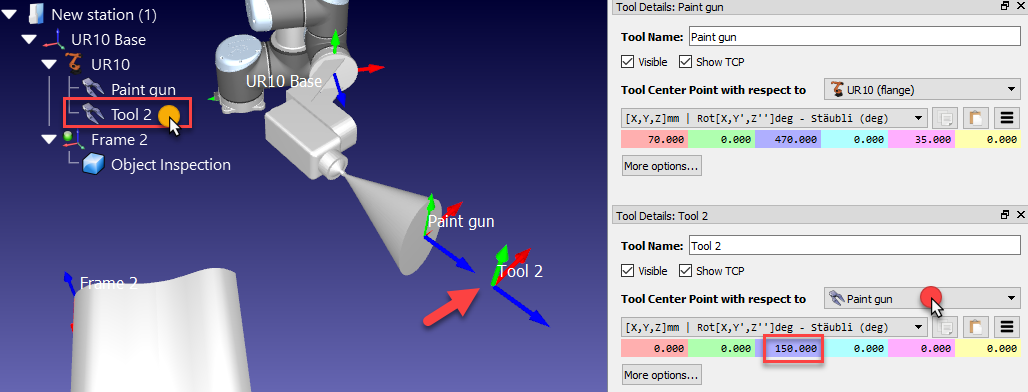
Essas etapas pressupõem que um segundo TCP deve ser adicionado em relação ao primeiro a 150 mm ao longo do eixo Z:
1.Clique com o botão direito do mouse no robô
2.Selecione
3.Clique duas vezes nesse novo TCP
4.Selecione o ponto central da ferramenta em relação à pistola de pintura➔
5.Insira a coordenada Z como 150 mm e defina as outras translações e rotações como 0.
Esse novo TCP em relação ao TCP definido anteriormente será removido nas próximas seções desta demonstração.
Mover a geometria da ferramenta
A geometria da ferramenta pode não estar alinhada corretamente com relação ao flange do robô (frame de referência do adaptador) quando ela é carregada no RoboDK.
As etapas a seguir pressupõem que foi cometido um erro e que a ferramenta foi montada 180 graus em torno do eixo Z, de modo que a correção a seguir deve ser aplicada:
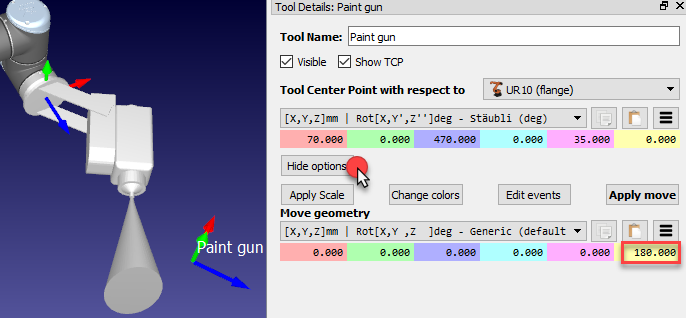
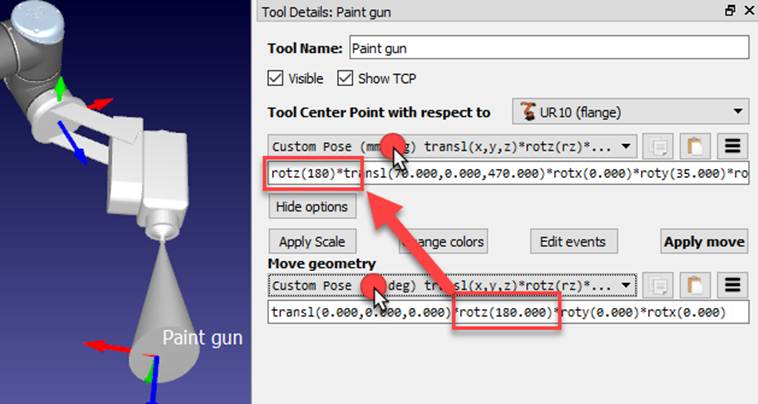
1.Selecione Mais opções na janela Detalhes da ferramenta.
2.Digite 180 na caixa amarela (rotação Z) da geometria da pistola de pintura, conforme mostrado na imagem a seguir. A roda do mouse pode ser usada na parte superior de cada caixa para atualizar rapidamente a posição na tela principal.