Primeiros passos
As posições do robô são registradas como alvos. Um alvo cartesiano define a posição da ferramenta em relação a um sistema de coordenadas. Um alvo de articulação define a posição do robô com base nos valores de articulação do robô.
Siga estas etapas para criar dois alvos como um novo alvo inicial e um alvo de aproximação, respectivamente:
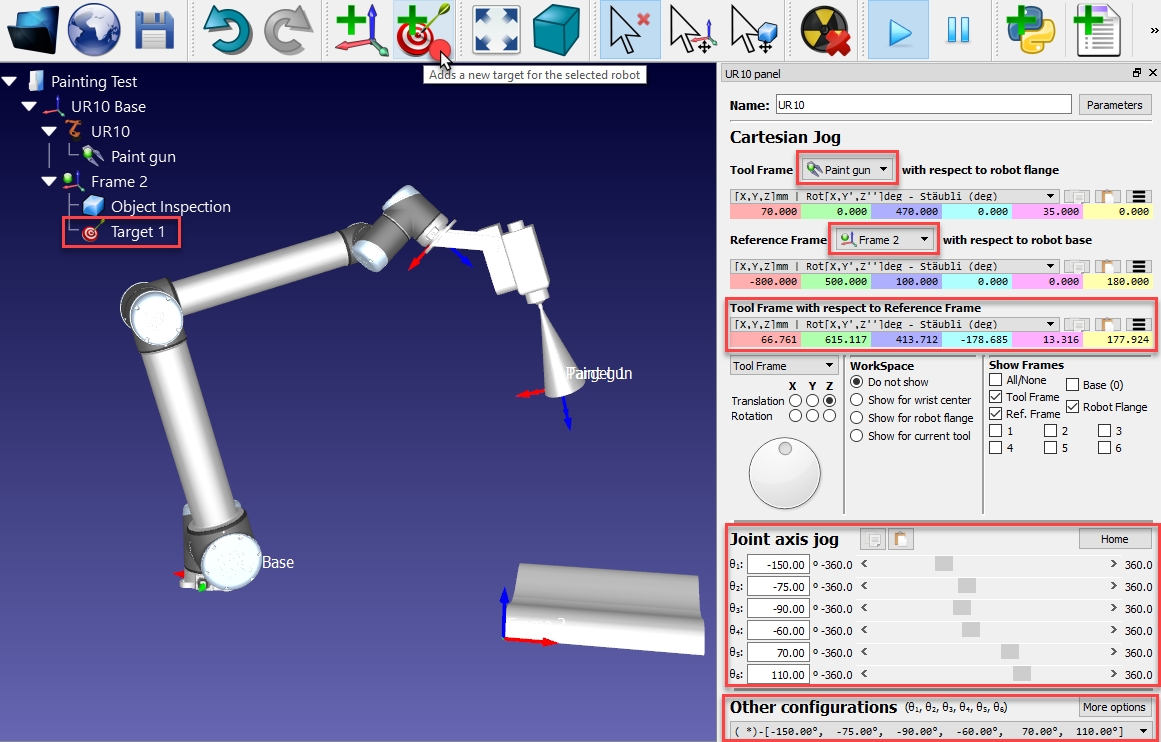
1.Clique duas vezes no robô para exibir o painel do robô.
2.Selecione Paint gun como Tool Frame. Quando uma ferramenta ou um quadro de referência estiver ativo, ele mostrará um ponto verde no ícone de árvore.
3.Selecione Frame 2 como Reference Frame (Quadro de referência).
4.Mantenha a tecla Alt pressionada e mova o robô arrastando-o pelo TCP ou pelo flange do robô para uma posição segura, livre de colisões com qualquer objeto. Como alternativa, mova as coordenadas do Tool Frame (TCP) em relação ao quadro de referência.
5.Use a seção Outras configurações para alternar entre diferentes configurações do robô e certifique-se de que nenhum dos eixos do robô esteja próximo dos limites do eixo.
6.Selecione Program➔![]() Teach Target (Ctrl+T) ou o botão correspondente na barra de ferramentas (como mostrado na imagem). O alvo será colocado como uma dependência do quadro de referência ativo e lembrará automaticamente a posição atual do robô (eixos cartesianos e de articulações).
Teach Target (Ctrl+T) ou o botão correspondente na barra de ferramentas (como mostrado na imagem). O alvo será colocado como uma dependência do quadro de referência ativo e lembrará automaticamente a posição atual do robô (eixos cartesianos e de articulações).
Neste exemplo, as coordenadas da articulação do robô usadas para o primeiro alvo são: [-150, -75, -90, -60, 70, 110] deg. O senhor pode copiar esses valores de articulação do texto e colá-los![]() no jog de eixo de articulação do painel do robô usando o botão correspondente.
no jog de eixo de articulação do painel do robô usando o botão correspondente.
7.Renomeie o primeiro alvo como Home pressionando F2. Como alternativa, selecione Tools (Ferramentas)➔ item Rename (Renomear).
8.Mova o robô para mais perto de uma borda da peça (arrastando a ferramenta usando a tecla Alt, inserindo coordenadas ou deslocando o eixo manualmente). Neste exemplo, usamos as seguintes coordenadas de articulação do robô [0,0,200,180,0,180] graus.
9.Selecione Program➔![]() Teach Target (Ctrl+T) ou o botão apropriado na barra de ferramentas para criar um novo alvo.
Teach Target (Ctrl+T) ou o botão apropriado na barra de ferramentas para criar um novo alvo.
10.Renomeie o destino para Approach, conforme mostrado na etapa 7.
11.Selecione o alvo Home e o alvo Approach alternativamente para ver o robô se movendo entre os dois alvos.
12.Clique com o botão direito do mouse no alvo e selecione Ensinar posição atual (Alt+ clique duas vezes) se for necessário registrar uma posição diferente para um dos alvos.
13.Clique com o botão direito do mouse no alvo e selecione![]() Target Options... (F3) para abrir a janela de opções de alvo mostrada na próxima imagem.
Target Options... (F3) para abrir a janela de opções de alvo mostrada na próxima imagem.
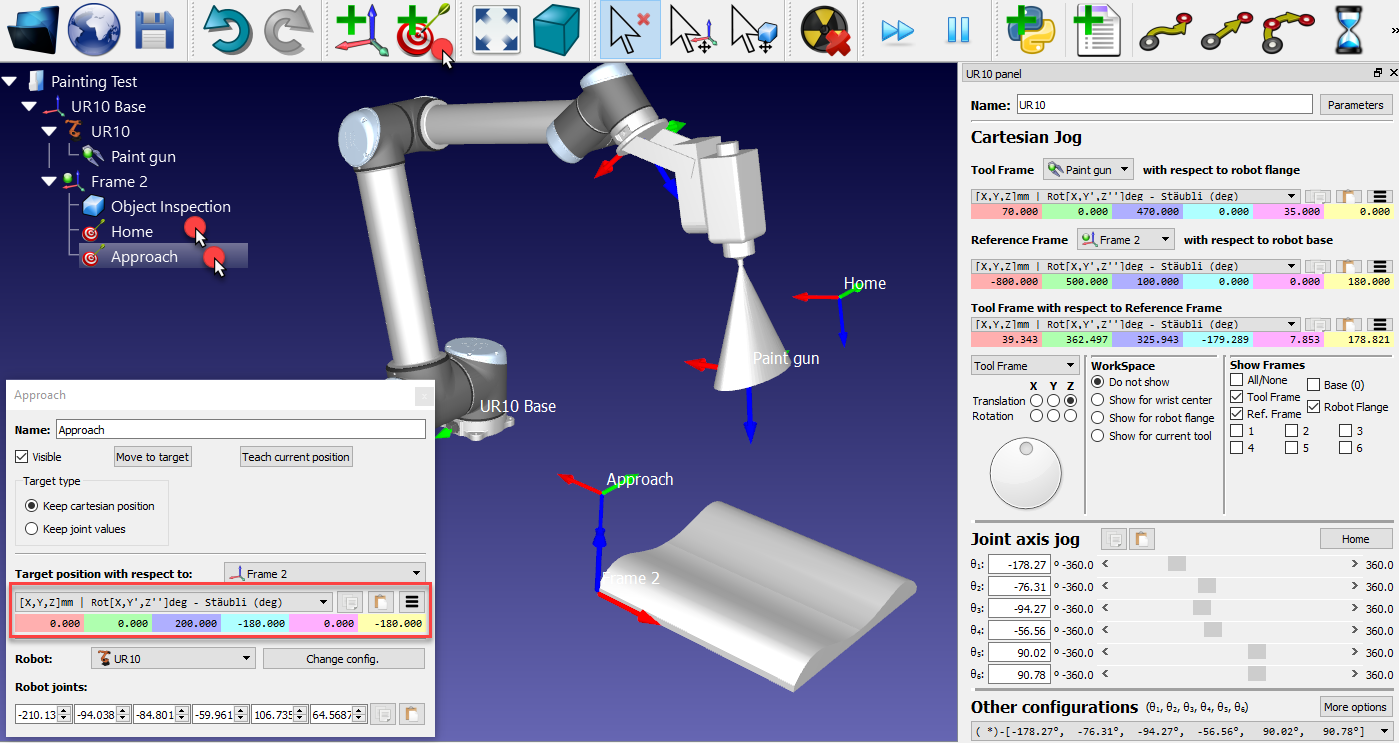
Se necessário, forneça valores diferentes para definir os alvos.