Definir um TCP relativo
Você pode fazer referência a uma ferramenta (TCP) em relação a outra, por exemplo, para definir um determinado afastamento ou para posicionar uma fresa em relação a uma referência ou a um suporte de ferramenta.
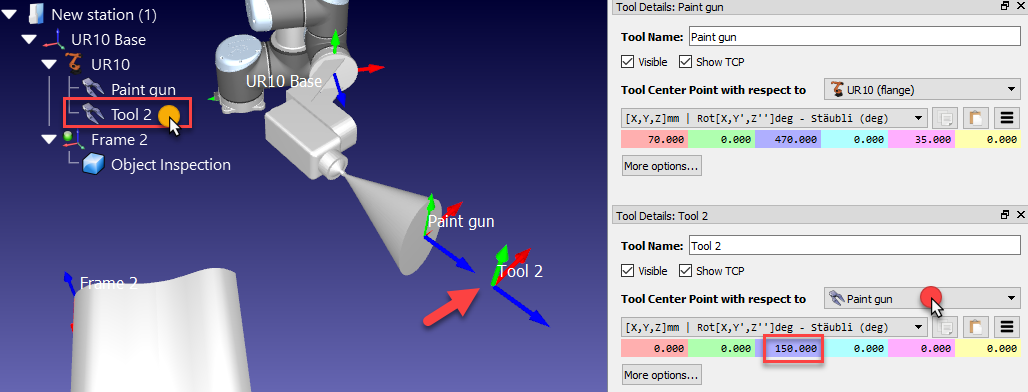
Essas etapas pressupõem que um segundo TCP deve ser adicionado em relação ao primeiro a 150 mm ao longo do eixo Z:
1.Clique com o botão direito do mouse no robô
2.Selecione
3.Clique duas vezes nesse novo TCP
4.Selecione o ponto central da ferramenta em relação à pistola de pintura➔
5.Insira a coordenada Z como 150 mm e defina as outras translações e rotações como 0.
Esse novo TCP em relação ao TCP definido anteriormente será removido nas próximas seções desta demonstração.