Gerar um programa de robô
Depois de ter a simulação pronta no RoboDK, você pode facilmente gerar o programa do robô. O programa do robô permite que você execute o programa no controlador do robô sem precisar escrever uma única linha de código.
Siga estas etapas para gerar um programa de robô:
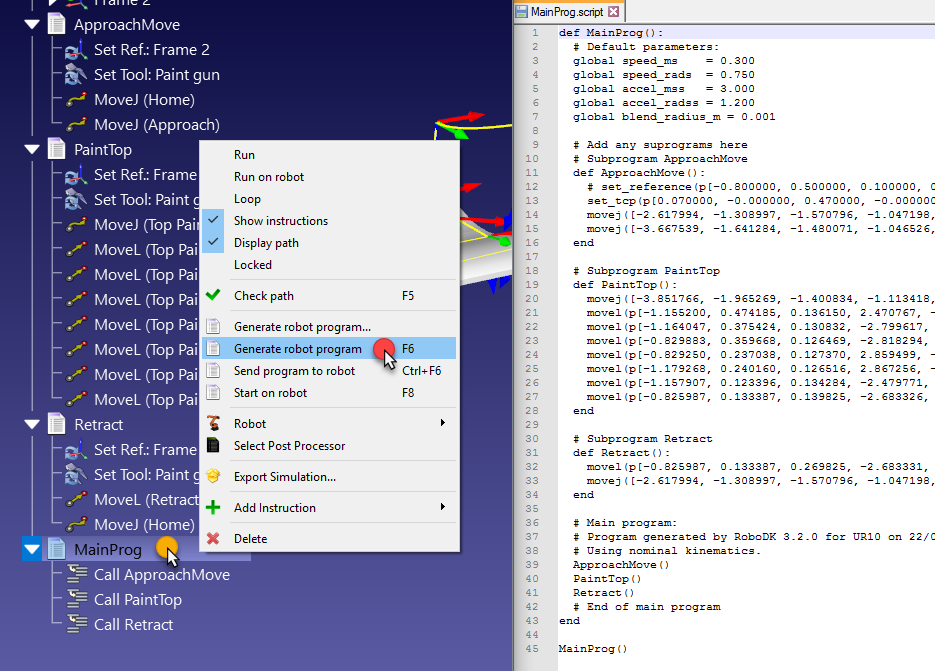
1.Clique com o botão direito do mouse no programa (MainProg, por exemplo). Você também pode manter pressionada a tecla Ctrl para selecionar vários programas de uma vez e gerá-los.
2.Selecione Gerar programa do robô (F6). Como alternativa, você pode selecionar Gerar programa do robô como... para especificar o local para salvar o arquivo.
Em seguida, você verá o programa do robô exibido em um editor de texto.
Para obter mais informações sobre como gerar programas de robôs, consulte a seção Programas.
Neste exemplo, você obterá o arquivo do programa SCRIPT para o seu robô UR. Especificamente para Universal Robots, você pode exportar qualquer programa individualmente ou o programa principal, incluindo os subprogramas.
O arquivo que você obteve é o resultado da geração do programa off-line. O arquivo pode ser enviado para o controlador do robô para executar os mesmos movimentos que foram simulados no RoboDK.
É possível alterar o pós-processador para robôs UR e personalizar a forma como um programa é gerado:
1.Clique com o botão direito do mouse em um programa ou robô.
2.Selecione
3.Selecione Universal Robots URP.
Gere o programa novamente. Neste exemplo, o pós-processador padrão usa valores de eixo para definir cada movimento linear e o segundo pós-processador usa coordenadas cartesianas para definir cada movimento linear.