Importar objetos 3D
O RoboDK é compatível com a maioria dos formatos 3D padrão, como os formatos STL, STEP (ou STP) e IGES (ou IGS). Outros formatos, como VRML, 3DS ou OBJ, também são suportados (STEP e IGES não são suportados nas versões para Mac e Linux).
Siga estas etapas para carregar um novo arquivo 3D:
1.Selecione Arquivo ➔ 
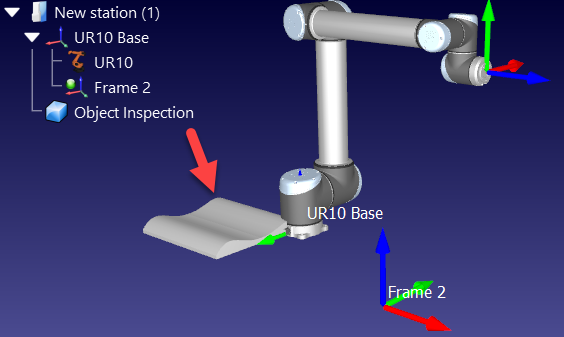
2.Selecione o objeto Object Inspection disponível na biblioteca padrão do RoboDK:
C:/RoboDK/Library/Object Inspection.
3.Como alternativa, arraste e solte os arquivos na janela principal do RoboDK para importá-los automaticamente
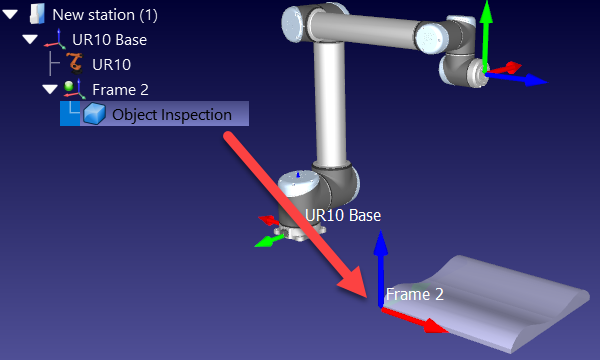
4.Arraste e solte o objeto no frame de referência Frame 2 (dentro da árvore de estações)
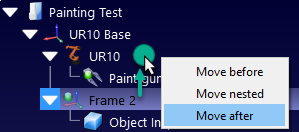
Dica: Arraste e solte o objeto mantendo pressionado o botão direito do mouse para reordenar os itens dentro da árvore.
Vídeo: Como importar objetos e criar ferramentas: https://www.youtube.com/watch?v=gNgCwwpZrWE&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=4.
Importante: É importante colocar o objeto aninhado no frame de referência para ensinar os pontos com relação ao objeto. Então, se o frame de referência for movido, os pontos serão movidos junto com o objeto.
Dica: Para arquivos STEP ou IGES grandes, é possível acelerar a velocidade de importação selecionando:
Ferramentas ➔ Opções ➔ CAD ➔ Configurações de importação rápida. Mais informações estão disponíveis na seção STEP/IGES.
Ferramentas ➔ Opções ➔ CAD ➔ Configurações de importação rápida. Mais informações estão disponíveis na seção STEP/IGES.
Dica: Embora os objetos possam ser movidos em relação ao frame de referência ao qual estão conectados (clicando duas vezes no objeto e inserindo as coordenadas), é recomendável mantê-los sempre em relação ao frame de referência fornecido e, em vez disso, mover o frame de referência. Isso permite a correspondência correta da referência do objeto apenas atualizando o frame de referência de/para o controlador do robô.