Mover a geometria da ferramenta
A geometria da ferramenta pode não estar alinhada corretamente com relação ao flange do robô (frame de referência do adaptador) quando ela é carregada no RoboDK.
As etapas a seguir pressupõem que foi cometido um erro e que a ferramenta foi montada 180 graus em torno do eixo Z, de modo que a correção a seguir deve ser aplicada:
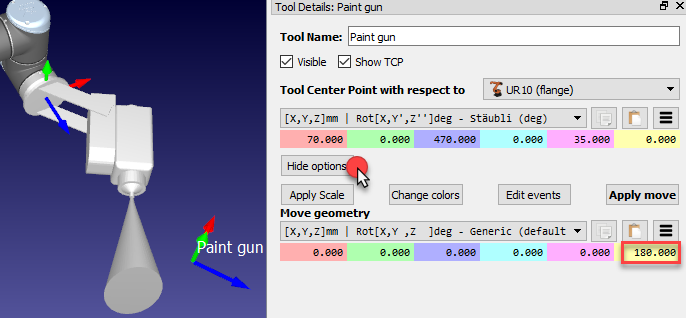
1.Selecione Mais opções na janela Detalhes da ferramenta.
2.Digite 180 na caixa amarela (rotação Z) da geometria da pistola de pintura, conforme mostrado na imagem a seguir. A roda do mouse pode ser usada na parte superior de cada caixa para atualizar rapidamente a posição na tela principal.
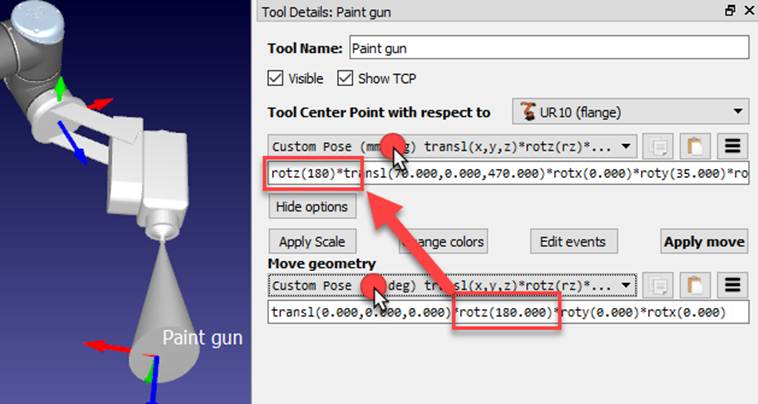
Dica: Se o TCP tiver sido definido antes dessa operação, ele não corresponderá mais à geometria. Para atualizar a posição do TCP para o local correto, podemos seguir as etapas descritas no início desta seção (mantendo pressionada a tecla Alt ou inserindo os valores manualmente). Como alternativa, poderíamos girar o TCP em torno do flange do robô selecionando o método de representação Script (pose personalizada) (como mostrado na próxima imagem) e inserir a rotação Z pré-multiplicando a definição do TCP (no início da definição da linha do TCP).
Observação: Mais informações sobre como fornecer transformações e poses estão disponíveis na seção de frames de referência.