Uso de scripts
Você pode personalizar a simulação usando scripts. A API do RoboDK permite que você personalize a simulação tanto quanto desejar. O RoboDK integra-se ao Python e, usando um script de exemplo ou usando a API do RoboDK, você pode melhorar o resultado da sua simulação.
Por padrão, o RoboDK instala o Python e um conjunto de scripts de exemplo que permitem que você melhore as simulações. Isso inclui a simulação de uma pistola de pintura, a simulação de câmeras 2D, a conversão de arquivos SVG em programas de robôs, a configuração automática de um TCP com base em um afastamento, a programação de robôs usando Python, a simulação de eventos discretos etc. Outras linguagens de programação também podem ser usadas, como C#, C++ ou Matlab. Mais informações estão disponíveis na seção API do RoboDK.
Neste exemplo, adicionaremos um script de exemplo existente que simulará o comportamento da pistola de pintura. Você também pode alterar a cor do spray com uma cor transparente (selecionando Ferramentas ➔ Ferramenta Mudar Cor - Shift+T) ou carregar o modelo existente com as cores apropriadas (disponível na biblioteca local como paint_gun.tool ou na biblioteca on-line; observe que a instrução Set Tool talvez precise ser atualizada para vincular-se à nova ferramenta).
1.Selecione Arquivo ➔
2.Navegue até C:/RoboDK/Library/Macros/ para ver alguns exemplos de macros.
3.Selecione SprayOn.
4.Selecione Abrir. Um novo objeto Python
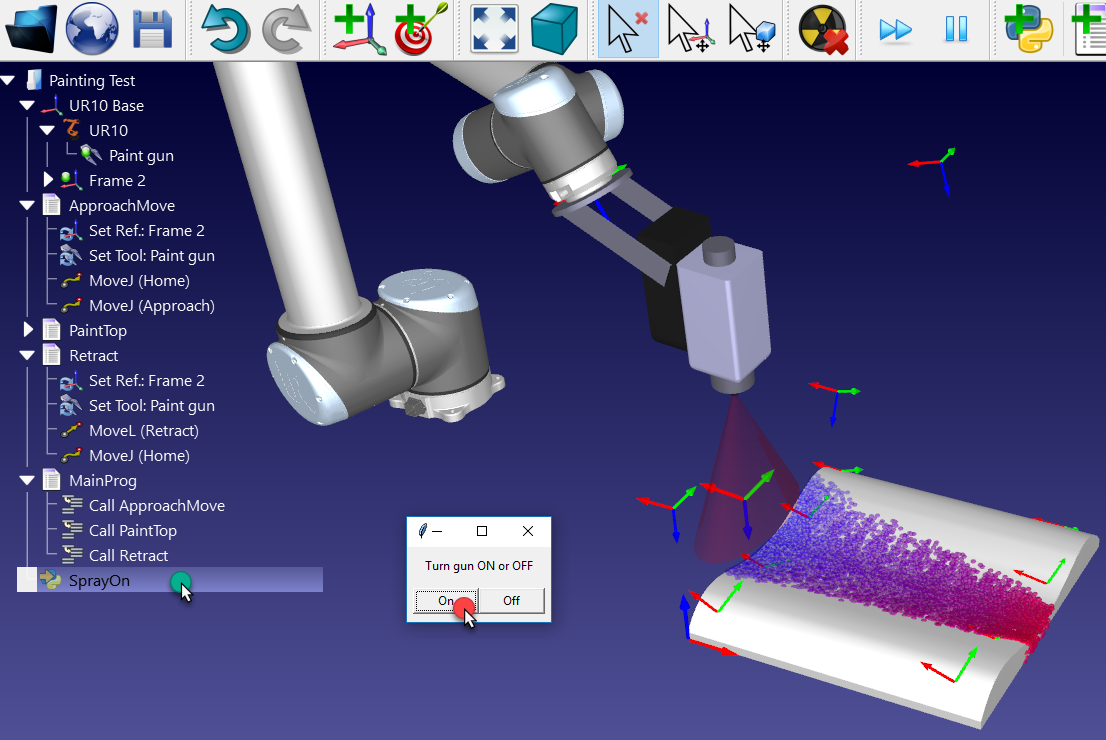
5.Clique duas vezes na macro SprayOn para testá-la.
6.Selecione On para ativá-la.
7.Mantenha a tecla Alt pressionada, arraste o flange do robô e mova o robô ao longo da superfície com a pistola de pintura.
Você deve ver o rastro da pistola de pintura. A cor e a transparência devem mudar dependendo de quão perto ou longe o TCP está da superfície.
Selecione Esc uma vez para limpar a tinta simulada.
8.Clique duas vezes no mesmo programa SprayOn e selecione Off para desativar a simulação de partículas.
Para entender melhor o que acontece nos bastidores, é possível visualizar ou editar o código Python da seguinte forma:
1.Clique com o botão direito do mouse em
2.Selecione Editar Script Python.
Uma nova janela (editor de texto) aparecerá mostrando o código que modela o comportamento do spray e como o Python está integrado ao RoboDK.
Para levar em conta a simulação de pulverização no programa principal, podemos seguir estas etapas:
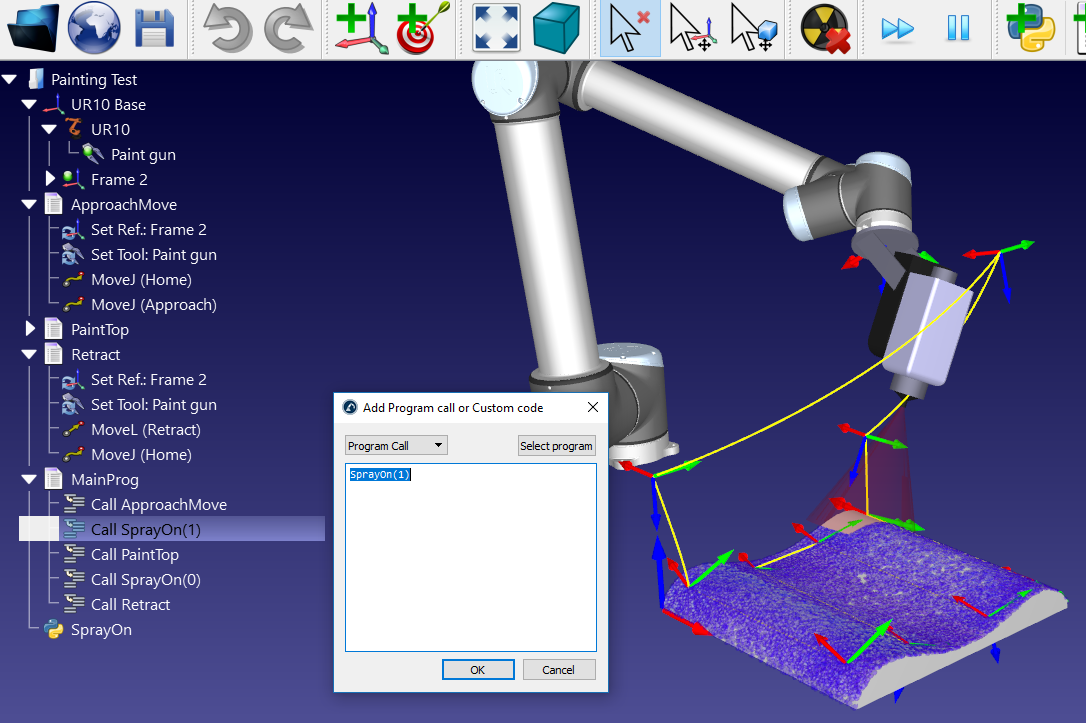
1.Clique com o botão direito do mouse na instrução Call ApproachMove.
2.Selecione Adicionar Instrução ➔
3.Digite SprayOn(1).
4.Selecione OK.
5.Repita a mesma operação após a configuração SprayOn(0) do programa PaintTop, conforme mostrado na imagem a seguir.
Se necessário, reordene as instruções arrastando-as e soltando-as dentro do programa.
6.Execute o programa MainProg. Após duas iterações, o resultado deve ser semelhante ao mostrado na imagem (simulando em velocidade normal).
Também é possível criar novas macros:
1.Selecione Programa ➔
2.Clique com o botão direito do mouse no novo programa e selecione Editar Script Python.
O RoboDK suporta a configuração da velocidade do robô dentro do programa, a configuração de saídas digitais, a espera por entradas digitais, a exibição de mensagens, etc. Essas instruções estão disponíveis no menu Programa.