Configurações de objeto
Os objetos podem ser carregados no RoboDK usando formatos de arquivo 3D, como STL, STEP ou IGES. Clique duas vezes em um objeto na árvore ou na visualização 3D para abrir a janela de configurações
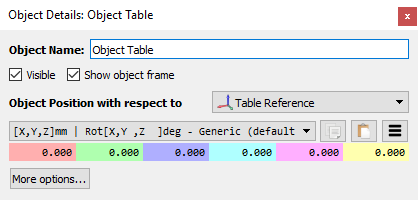
É possível definir ou visualizar a posição em relação a qualquer Frame de Referência. No entanto, os objetos geralmente são vinculados a frames de referência e é recomendável mover o Frame de Referência se um objeto precisar ser movido. Os objetos também podem ser agarrados pelas ferramentas do robô após a ocorrência de um determinado evento de simulação.
Dica: Se você quiser mover um objeto para um local específico, é melhor colocar o objeto em um Frame de Referência e, em vez disso, mover o Frame de Referência. Isso ajudará a definir a localização do objeto em relação ao robô se você estiver planejando usar um objeto para criar um novo programa de robô (por exemplo, usando as ferramentas de seguimento de curva ou as ferramentas de marcação de pontos em superfície). Você pode arrastar e soltar um objeto em um Frame de Referência dentro da árvore para especificar essa dependência.
O menu Mais opções... permite alterar a cor do objeto, aplicar um fator de escala ou mover a geometria em relação ao seu próprio Frame de Referência.
Dica: é possível mesclar vários objetos em um só selecionando dois ou mais objetos (mantendo pressionada a tecla Ctrl) e, em seguida, clicando com o botão direito do mouse e selecionando Mesclar.