Configurações do robô
Uma configuração do robô define um estado específico dele. Para alterar a configuração, é necessário atravessar uma singularidade. Os robôs não podem atravessar uma singularidade quando um movimento linear está sendo feito (para isso, seria necessário um movimento angular).
Em outras palavras, para realizar um movimento linear entre dois pontos, a configuração do robô deve ser a mesma para todo o movimento, incluindo o primeiro e o último pontos.
Clique com o botão direito do mouse em um robô e selecione Alterar configuração para abrir a janela de configurações do robô. Também é possível abrir essa janela selecionando Mais opções no painel do robô.
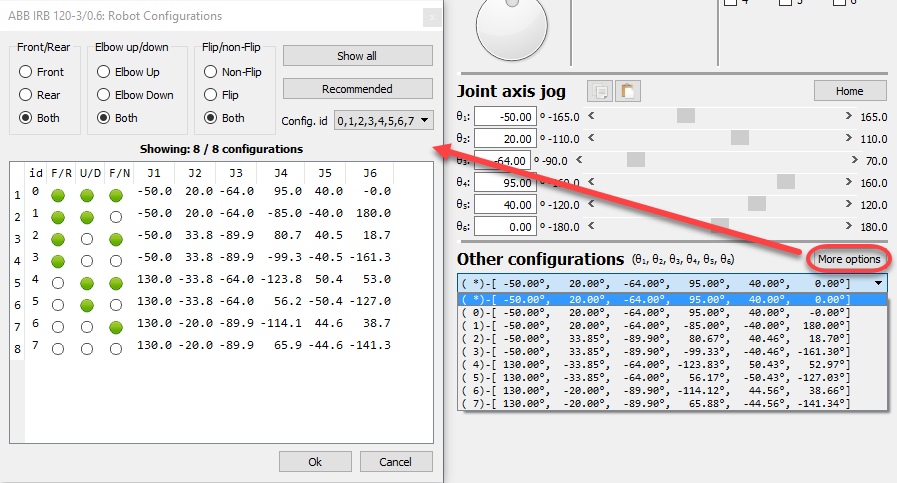
Para um robô padrão de 6 eixos, normalmente há 8 configurações diferentes para qualquer posição do robô, se presumirmos que cada eixo do robô pode se mover uma volta completa. Na prática, os limites dos eixos podem ser mais ou menos restritos, dependendo do robô. Portanto, pode ser possível ter de 1 a mais de 100 configurações diferentes de robô para um local específico, dependendo do robô.
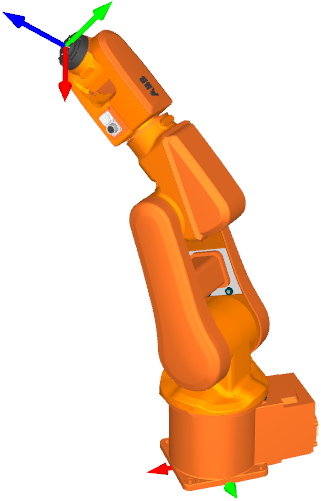
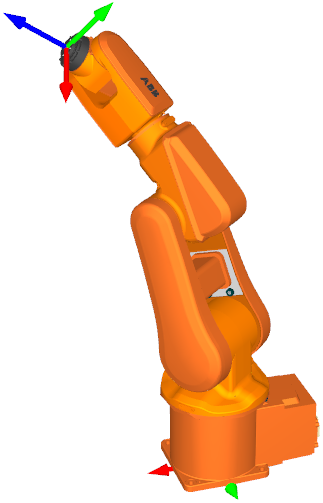
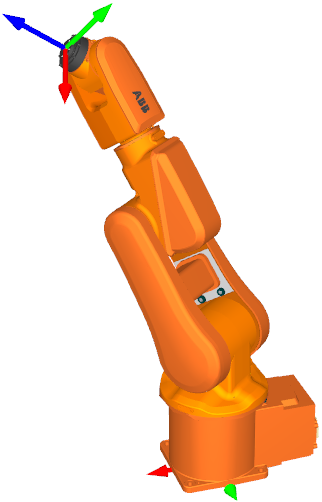
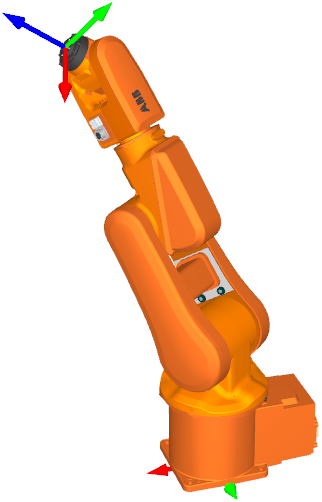
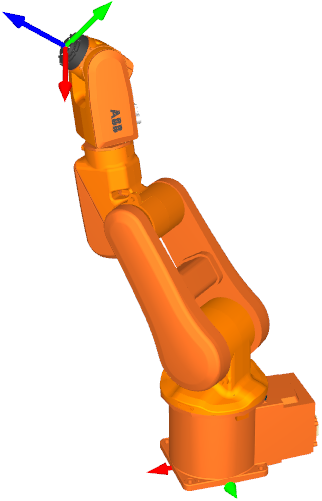
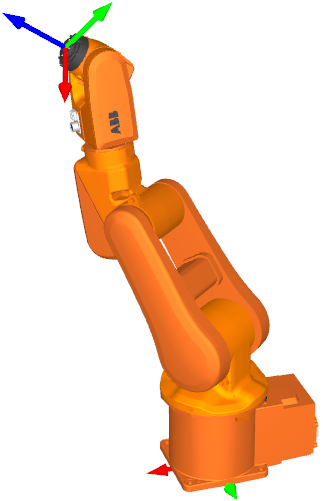
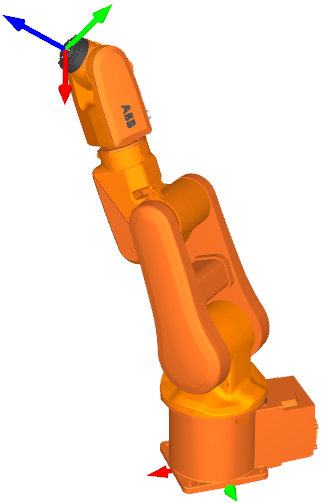
Uma configuração de robô define uma maneira específica (modo de montagem) de alcançar uma posição com o robô. Por exemplo, o robô pode ter o cotovelo para cima ou para baixo (Up vs. Down, ou U/D), ao mesmo tempo em que pode estar de frente para o ponto ou a base pode girar 180 graus para alcançar o ponto de costas (Front vs. Rear, ou F/R). Por fim, a articulação 5 pode virar trocando o sinal ao mesmo tempo em que o eixo 4 e o eixo 6 compensam esse movimento (Flip vs. Non-Flip, ou F/N). No total, isso fornece as configurações 2*2*2=8.