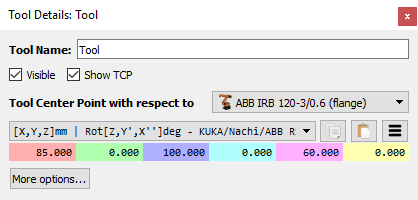
Ferramenta do robô (TCP)
Clique duas vezes em uma ferramenta do robô
Observação: A posição do TCP também pode ser modificada no painel do robô.
A seleção de Mais opções... permite aplicar um fator de escala à geometria da ferramenta ou mover a geometria em relação ao flange do robô. A alteração desses valores não tem impacto sobre os programas do robô. A geometria é usada para fins de exibição e verificação de colisão. (mantendo o TCP intacto).
Dica: É possível fornecer a posição do TCP com relação a outro TCP selecionando esse TCP de referência em vez do flange do robô. Por exemplo, uma ferramenta de corte pode ser definida em uma distância específica ao longo do eixo Z em relação a outro TCP que representa o fuso. Este exemplo fornece mais detalhes.
Vídeo: O vídeo a seguir fornece uma visão geral das ferramentas do robô (TCP): https://www.youtube.com/watch?v=FltOFBCzx-w&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=11