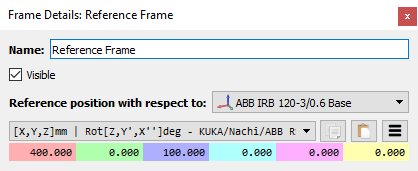
Clique duas vezes em um Frame de Referência para ver mais detalhes sobre esse Frame de Referência e modificar sua posição em relação ao frame de base do robô ou a qualquer outro Frame de Referência disponível na estação. Por padrão, as coordenadas exibidas (pose) são relativas ao pai do frame de referência (neste exemplo, a frame de base do robô).
Observação: A frame de referência também pode ser modificada no painel do robô.
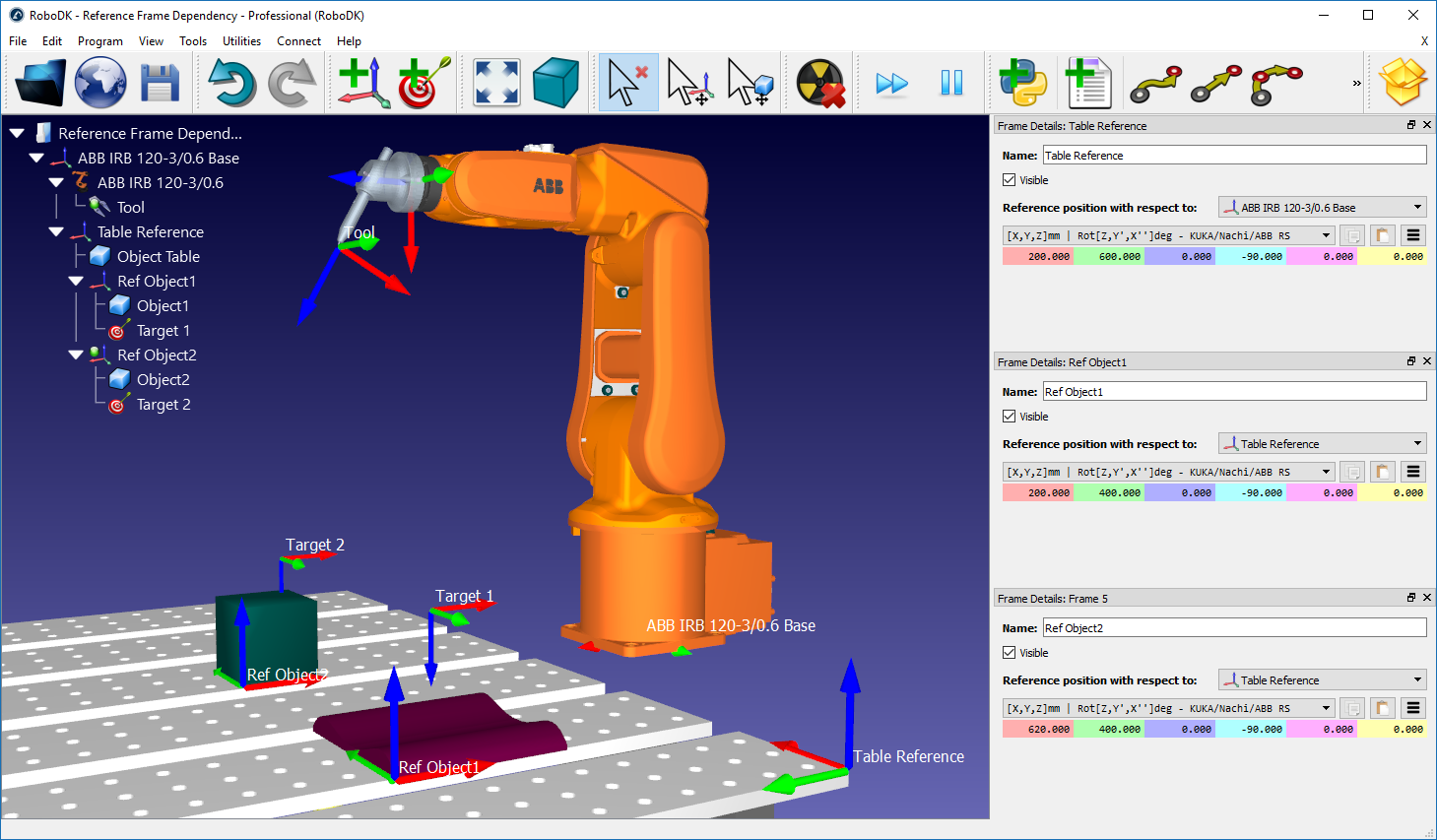
Vários frames de referência podem ser relacionados uns aos outros para criar a dependência que existe em um aplicativo real. Por exemplo, uma mesa pode ter uma posição específica em relação ao robô. Em seguida, dois ou mais objetos na mesa podem ter uma posição específica em relação à referência da mesa. Mover a referência da mesa não alterará a relação entre os objetos e a mesa, mas alterará a relação de todos os objetos com relação ao robô. A imagem a seguir mostra esse exemplo.
Dica: Recomenda-se mover objetos usando frames de referência. Nesse caso, é mais fácil movê-los na estação e usar o mesmo Frame de Referência como referência para os pontos do robô.
Vídeo: Saiba mais sobre os frames de referência e por que eles são importantes para a simulação e a programação off-line: https://www.youtube.com/watch?v=GGc_bXPs2dk.