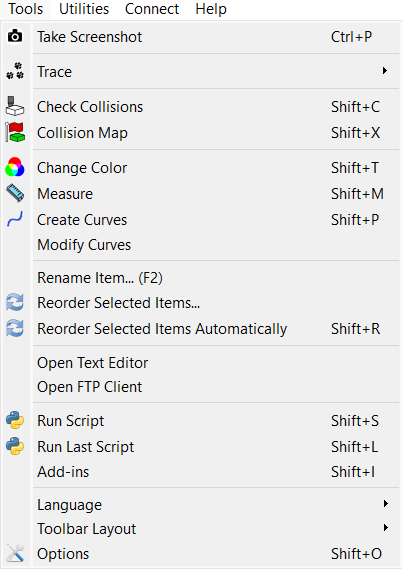
Você pode acessar ferramentas genéricas no Menu Ferramentas, como fazer medições em 3D, ativar a verificação de colisões ou ativar o rastreamento do robô.
A ativação Rastro mostrará o rastreamento de todos os robôs à medida que eles se movem.
Verificar colisões ativará ou desativará a verificação de colisões. Quando a verificação de colisão estiver ativada, os objetos que estiverem em estado de colisão serão exibidos em vermelho. O Mapa de Colisões permite especificar quais interações de objetos estão sendo verificadas.
Observação: mais informações sobre a detecção de colisões estão disponíveis na seção Colisões.
A ferramenta Mudar Cor exibirá uma pequena janela que permite alterar a cor de robôs e objetos. Também é possível inverter os vetores normais das superfícies.
Medir exibirá uma janela que permite medir pontos em 3D com relação a um Frame de Referência local ou ao Frame de Referência da estação (medições absolutas).
É possível especificar o idioma da interface do RoboDK selecionando Ferramentas ➔ Idioma e selecionando o idioma preferido. O RoboDK será exibido imediatamente no idioma selecionado.
O Layout da barra de ferramentas permite configurar a barra de ferramentas padrão. Como alternativa, é possível especificar uma barra de ferramentas para um uso mais básico ou mais avançado.
Selecione Opções para abrir o menu principal de opções. Mais informações estão disponíveis na seção Menu Opções.