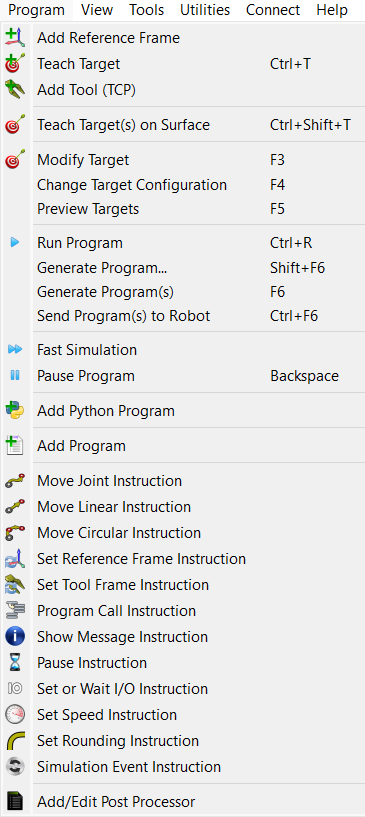
O menu Programa contém todos os componentes relacionados à programação off-line (OLP) e à geração de programas. É possível adicionar novos programas, frames de referência, pontos ou ferramentas aos robôs. Esses componentes de programação off-line (frames de referência, ferramentas, pontos etc.) aparecem em todos os programas gerados off-line.
Adicionar Frame de Referência adicionará um novo Frame de Referência anexado à raiz da estação ou anexado a outro Frame de Referência se esse Frame de Referência tiver sido selecionado.
Adicionar Ferramenta vazia adicionará um novo TCP a um robô. Não é necessária nenhuma geometria para adicionar uma nova ferramenta. Múltiplas ferramentas permitem fazer referência a diferentes partes da mesma geometria vinculada a uma ferramenta.
Marcar Ponto (Ctrl+T) adicionará um novo ponto ao Frame de Referência ativo para a ferramenta ativa do robô. O Frame de Referência ativo e a ferramenta ativa podem ser selecionados no painel do robô. Também é possível clicar com o botão direito do mouse em um Frame de Referência ou em uma ferramenta para torná-los ativos.
Marcar Pontos na Superfície (Ctrl+Shift+T) permitirá que o usuário selecione pontos de um objeto para criar pontos facilmente. Um exemplo está disponível nesta seção.
Adicionar Programa adicionará um novo programa que pode ser criado usando a interface gráfica do usuário (GUI) do RoboDK. Não é necessário ter experiência em programação para criar ou modificar esse tipo de programa de robô. O programa do robô pode ser simulado e gerado para um robô específico, de forma automática e fácil.
A seção Instruções de programa do documento Programação off-line fornece mais informações sobre as instruções de programa disponíveis por meio da GUI.
A opção Adicionar Programas Python incluirá um exemplo de programa/macro/script/módulo Python na estação que se vincula à API do RoboDK. Um programa Python usando a API do RoboDK permite criar programas de robô a partir de um código de programação genérico (Python). É possível implementar esses programas para qualquer controlador de robô específico. Também é possível simular tarefas específicas para ampliar os programas da GUI. Essas tarefas podem ser subprogramas de robôs para programação off-line, programação on-line ou simplesmente simular eventos específicos, como fazer com que os objetos apareçam automaticamente em pontos aleatórios para uma simulação de pegar e colocar. Um programa Python é como um arquivo de texto incorporado na estação e contém código Python para automatizar tarefas específicas no RoboDK. A API do RoboDK é implementada usando Python por padrão, mas outras linguagens de programação podem ser usadas para fazer a interface com o RoboDK.
Observação: a diferença entre um programa normal (usando Adicionar Programa) gerado usando a interface gráfica do usuário (GUI) e um programa Python (usando Adicionar Programa Python) é que o primeiro não requer experiência em programação. Por outro lado, uma macro Python usando a API do RoboDK permite estender os limites de um programa gerado usando a interface gráfica do usuário.
Por fim, é possível Adicionar ou Editar Pós-processadores. Os Pós-processadores definem a forma como os programas são gerados para um controlador de robô específico, permitindo utilizar a sintaxe específica do fornecedor. Os Pós-processadores são o componente final do processo de programação off-line.