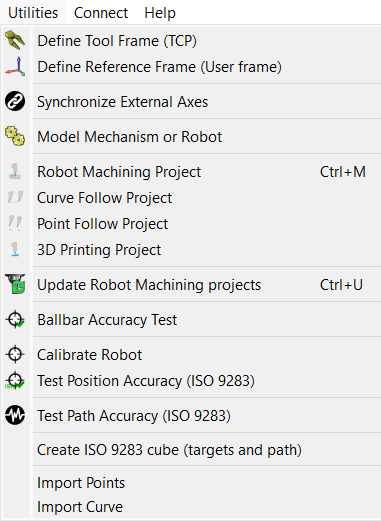
O menu Utilitários permite executar tarefas específicas para configurar o robô e realizar operações de manufatura específicas, como usinagem, perfuração ou impressão 3D do robô.
Calibrar Frame da Ferramenta (TCP) permite calibrar um TCP de robô fornecendo dados da configuração real, como as configurações de eixos para alcançar um ponto usando diferentes orientações. Esse procedimento geralmente está disponível na maioria dos terminais de programação de robôs. O RoboDK permite calibrar um TCP com quantas configurações você desejar. O uso de mais configurações permite obter um valor de TCP mais preciso. Leia mais sobre a calibração do TCP.
A opção Calibrar frame de referência permite identificar um frame de referência com relação a um frame de base do robô. Isso permite combinar com precisão a peça da configuração real com o ambiente virtual. Leia mais sobre a calibração do Frame de Referência.
A opção Sincronizar eixos externos permite configurar um ou mais eixos externos e um robô como um mecanismo de robô. Mais informações estão disponíveis na seção Eixos externos.
Projeto de Usinagem de Robôs permite que você converta trajetórias de ferramentas de usinagem em simulações de robôs e programas de robôs. O RoboDK pode importar programas feitos para CNC de 5 eixos usando software CAM, como código G genérico ou arquivos APT. Esses programas/caminhos de ferramentas podem ser facilmente simulados e convertidos em programas de robôs com o RoboDK. Mais informações estão disponíveis nesta seção.
Projeto de Seguimento de Curva é como um projeto de fresagem com robô, mas permite selecionar curvas extraídas da geometria 3D como trajetórias de ferramenta. Também é possível selecionar Importar Curva para importar curvas 3D de arquivos CSV ou TXT. Essas curvas devem ser fornecidas como uma lista de pontos XYZ e, opcionalmente, como um vetor IJK. Mais informações estão disponíveis na seção de Projeto de Seguimento de Curva.
Projeto de Seguimento de Pontos é como um projeto de fresagem com robô, mas permite selecionar pontos extraídos da geometria 3D e criar facilmente um caminho de ferramenta de robô. Também é possível selecionar Importar Pontos para importar pontos 3D de arquivos CSV ou TXT. Esses pontos devem ser fornecidos como uma lista de pontos XYZ e, opcionalmente, como um vetor IJK. Mais informações estão disponíveis na seção de Projeto de Seguimento de Pontos.
Selecione o Projeto de Impressão 3D para gerar um programa de impressão 3D do robô para um objeto específico. O objeto deve estar disponível na estação RoboDK. A trajetória da ferramenta de impressão 3D é convertido em código G nos bastidores usando um Slicer e, em seguida, é tratada como um caminho de ferramenta de usinagem de 3 eixos. Mais informações disponíveis na seção de impressão 3D com robô.
O teste Ballbar Accuracy permite verificar o desempenho do robô usando um dispositivo Telescoping Double Ballbar. Mais informações sobre o teste de ballbar do robô estão disponíveis aqui: https://robodk.com/ballbar-test.
Calibrar Robô permite a configuração de um projeto de calibração para melhorar a precisão e encontrar os parâmetros de erro do robô. Um robô calibrado pode ser usado em qualquer projeto de programação off-line do RoboDK. A calibração do robô geralmente melhora a precisão do robô em um fator de 5 ou mais, dependendo do modelo do robô. A calibração requer o uso de sistemas de medição para fazer as medições do robô. A precisão e a repetibilidade do robô podem ser testadas com a ISO9283 antes e/ou depois da calibração. Mais informações sobre calibração de robôs e testes de desempenho aqui: https://robodk.com/robot-calibration.
Observação: algumas dessas ferramentas podem exigir uma licença específica que amplia a licença padrão de programação off-line.