1.Menu Arquivo:Permite importar novos arquivos (geometria 3D, robôs, ferramentas, caminhos de ferramentas, ...) e abrir ou salvar projetos do RoboDK (extensão de arquivo RDK).
2.Menu Editar:Permite cortar/copiar/colar um item ou um grupo de itens e desfazer/refazer ações.
3.Menu Programa:Permite criar ou modificar os programas do robô e outras opções relacionadas à programação off-line (OLP).
4.Menu Visualizar: Oferece ações úteis para navegar em 3D e configurar visualizações específicas.
5.Menu Ferramentas:Fornece ferramentas gerais, como verificação de colisões, medição de pontos ou abertura das opções principais.
6.Menu Utilitários:Permite realizar operações específicas, como usar robôs para operações de manufatura, calibrar um TCP ou um Frame de Referência, usar robôs como uma impressora 3D ou como um CNC de 5 eixos, calibrar um robô... Essas operações podem exigir uma opção de licença específica.
7.Menu Conectar: Permite conectar-se a um robô, a um sistema de medição ou simular câmeras.
8.Menu Ajuda:Permite abrir a documentação on-line (F1), verificar se há atualizações ou configurar uma licença.
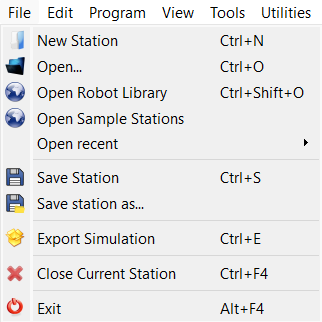
Menu Arquivo
O Menu Arquivo permite que você abra e salve projetos do RoboDK. Você também pode carregar qualquer tipo de arquivo suportado pelo RoboDK ou exportar seu projeto usando diferentes formatos ou métodos.
Nova Estação adicionará uma nova estação à árvore. Uma estação pode ser carregada ou salva como um arquivo RDK. O arquivo RDK (extensão RDK) contém todas as informações sobre os robôs e objetos, portanto, não é necessário manter uma cópia separada dos itens importados.
Dica: É possível ter mais de uma estação aberta ao mesmo tempo. Ao clicar duas vezes no ícone da estação na árvore, a estação será exibida.
Abrir carregará um novo arquivo RoboDK (RDK Station) ou importará qualquer outro formato de arquivo reconhecido, como .robot para arquivos de robôs, STEP/IGES/STL para objetos, .tool para arquivos de ferramentas, etc.
Abrir biblioteca on-line mostrará uma nova janela com a biblioteca disponível on-line.
Salvar Estação salvará o arquivo RDK. Selecione Salvar Estação como... para fornecer o local do arquivo.
Exportar Simulação exportará um programa ou uma simulação específica como um link compartilhável do RoboDK para a Web, um PDF 3D ou um arquivo HTML 3D. Este exemplo mostra a exportação de uma simulação HTML 3D.
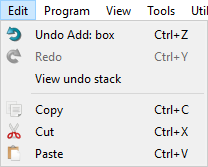
Menu Editar
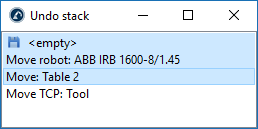
As ações Desfazer (Ctrl+Z) e Refazer (Ctrl+Y) podem ser acessadas no menu Editar. O histórico de ações de desfazer também está disponível e permite reverter as alterações, para trás ou para frente, para um estado específico, selecionando a ação.
Também é possível cortar (Ctrl+X), copiar (Ctrl+C) ou colar (Ctrl+V) um item ou um grupo de itens da árvore de estações. Se um item for copiado, todos os itens anexados a ele também serão copiados.
Dica: É possível agrupar ações semelhantes em uma só. Por exemplo, se o robô for movido manualmente, cada pequena etapa será registrada (por padrão). Para agrupar todas as pequenas etapas em uma só: selecione Ferramentas ➔ Opções ➔ marque a opção Agrupar ações semelhantes.
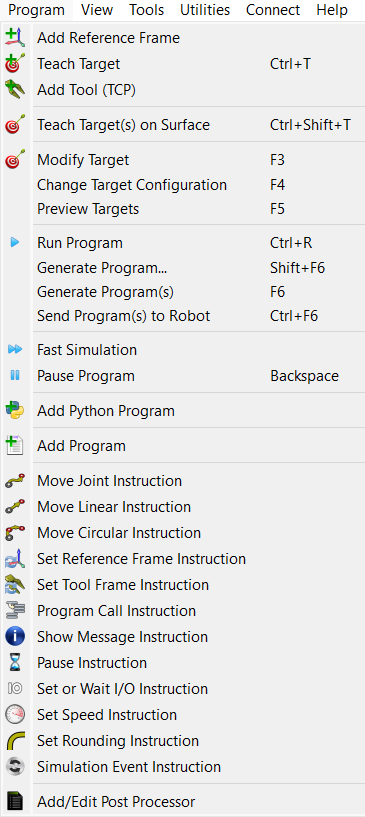
Menu Programa
O menu Programa contém todos os componentes relacionados à programação off-line (OLP) e à geração de programas. É possível adicionar novos programas, frames de referência, pontos ou ferramentas aos robôs. Esses componentes de programação off-line (frames de referência, ferramentas, pontos etc.) aparecem em todos os programas gerados off-line.
Adicionar Frame de Referência adicionará um novo Frame de Referência anexado à raiz da estação ou anexado a outro Frame de Referência se esse Frame de Referência tiver sido selecionado.
Adicionar Ferramenta vazia adicionará um novo TCP a um robô. Não é necessária nenhuma geometria para adicionar uma nova ferramenta. Múltiplas ferramentas permitem fazer referência a diferentes partes da mesma geometria vinculada a uma ferramenta.
Marcar Ponto (Ctrl+T) adicionará um novo ponto ao Frame de Referência ativo para a ferramenta ativa do robô. O Frame de Referência ativo e a ferramenta ativa podem ser selecionados no painel do robô. Também é possível clicar com o botão direito do mouse em um Frame de Referência ou em uma ferramenta para torná-los ativos.
Marcar Pontos na Superfície (Ctrl+Shift+T) permitirá que o usuário selecione pontos de um objeto para criar pontos facilmente. Um exemplo está disponível nesta seção.
Adicionar Programa adicionará um novo programa que pode ser criado usando a interface gráfica do usuário (GUI) do RoboDK. Não é necessário ter experiência em programação para criar ou modificar esse tipo de programa de robô. O programa do robô pode ser simulado e gerado para um robô específico, de forma automática e fácil.
A seção Instruções de programa do documento Programação off-line fornece mais informações sobre as instruções de programa disponíveis por meio da GUI.
A opção Adicionar Programas Python incluirá um exemplo de programa/macro/script/módulo Python na estação que se vincula à API do RoboDK. Um programa Python usando a API do RoboDK permite criar programas de robô a partir de um código de programação genérico (Python). É possível implementar esses programas para qualquer controlador de robô específico. Também é possível simular tarefas específicas para ampliar os programas da GUI. Essas tarefas podem ser subprogramas de robôs para programação off-line, programação on-line ou simplesmente simular eventos específicos, como fazer com que os objetos apareçam automaticamente em pontos aleatórios para uma simulação de pegar e colocar. Um programa Python é como um arquivo de texto incorporado na estação e contém código Python para automatizar tarefas específicas no RoboDK. A API do RoboDK é implementada usando Python por padrão, mas outras linguagens de programação podem ser usadas para fazer a interface com o RoboDK.
Observação: a diferença entre um programa normal (usando Adicionar Programa) gerado usando a interface gráfica do usuário (GUI) e um programa Python (usando Adicionar Programa Python) é que o primeiro não requer experiência em programação. Por outro lado, uma macro Python usando a API do RoboDK permite estender os limites de um programa gerado usando a interface gráfica do usuário.
Por fim, é possível Adicionar ou Editar Pós-processadores. Os Pós-processadores definem a forma como os programas são gerados para um controlador de robô específico, permitindo utilizar a sintaxe específica do fornecedor. Os Pós-processadores são o componente final do processo de programação off-line.
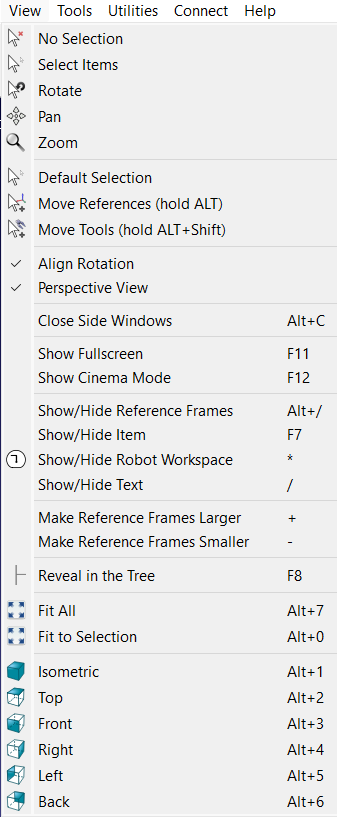
Menu Exibir
A maioria das opções necessárias para navegar em 3D está disponível no menu Exibir. É possível girar, deslocar e aplicar zoom nesse menu (bem como clicar com o botão direito do mouse na visualização 3D). Isso é útil para navegar em 3D usando um touchpad de laptop (em vez de um mouse).
Para permitir uma rotação livre em qualquer direção, desmarque a opção: Exibir ➔ Alinhar rotação. Caso contrário, o RoboDK bloqueia a referência da estação para manter o plano XY horizontal por padrão.
É possível mostrar ou ocultar o espaço de trabalho do robô selecionando a tecla asterisco (*). Também é possível alternar entre itens visíveis e invisíveis selecionando a tecla F7.
Dica: É possível aumentar ou diminuir os frames de referência pressionando a tecla + ou - várias vezes. Se muitos itens estiverem visíveis, isso é útil para ajustar o tamanho dos frames de referência e selecioná-los adequadamente se precisarem ser movidos da visualização 3D (mantendo pressionada a tecla ALT, por exemplo).
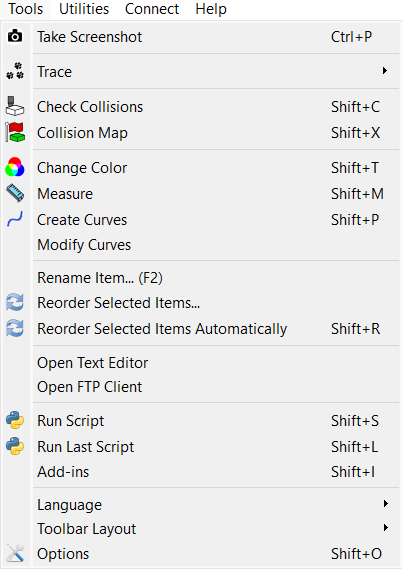
Menu Ferramentas
Você pode acessar ferramentas genéricas no Menu Ferramentas, como fazer medições em 3D, ativar a verificação de colisões ou ativar o rastreamento do robô.
A ativação Rastro mostrará o rastreamento de todos os robôs à medida que eles se movem.
Verificar colisões ativará ou desativará a verificação de colisões. Quando a verificação de colisão estiver ativada, os objetos que estiverem em estado de colisão serão exibidos em vermelho. O Mapa de Colisões permite especificar quais interações de objetos estão sendo verificadas.
Observação: mais informações sobre a detecção de colisões estão disponíveis na seção Colisões.
A ferramenta Mudar Cor exibirá uma pequena janela que permite alterar a cor de robôs e objetos. Também é possível inverter os vetores normais das superfícies.
Medir exibirá uma janela que permite medir pontos em 3D com relação a um Frame de Referência local ou ao Frame de Referência da estação (medições absolutas).
É possível especificar o idioma da interface do RoboDK selecionando Ferramentas ➔ Idioma e selecionando o idioma preferido. O RoboDK será exibido imediatamente no idioma selecionado.
O Layout da barra de ferramentas permite configurar a barra de ferramentas padrão. Como alternativa, é possível especificar uma barra de ferramentas para um uso mais básico ou mais avançado.
Selecione Opções para abrir o menu principal de opções. Mais informações estão disponíveis na seção Menu Opções.
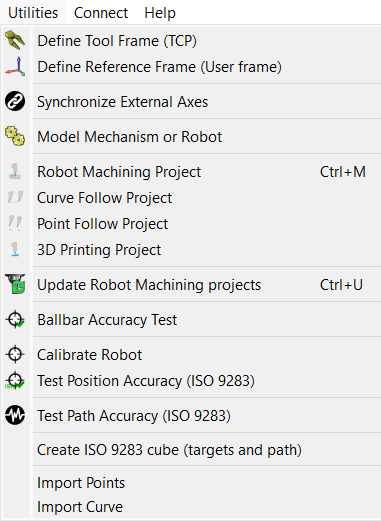
Menu Utilitários
O menu Utilitários permite executar tarefas específicas para configurar o robô e realizar operações de manufatura específicas, como usinagem, perfuração ou impressão 3D do robô.
Calibrar Frame da Ferramenta (TCP) permite calibrar um TCP de robô fornecendo dados da configuração real, como as configurações de eixos para alcançar um ponto usando diferentes orientações. Esse procedimento geralmente está disponível na maioria dos terminais de programação de robôs. O RoboDK permite calibrar um TCP com quantas configurações você desejar. O uso de mais configurações permite obter um valor de TCP mais preciso. Leia mais sobre a calibração do TCP.
A opção Calibrar frame de referência permite identificar um frame de referência com relação a um frame de base do robô. Isso permite combinar com precisão a peça da configuração real com o ambiente virtual. Leia mais sobre a calibração do Frame de Referência.
A opção Sincronizar eixos externos permite configurar um ou mais eixos externos e um robô como um mecanismo de robô. Mais informações estão disponíveis na seção Eixos externos.
Projeto de Usinagem de Robôs permite que você converta trajetórias de ferramentas de usinagem em simulações de robôs e programas de robôs. O RoboDK pode importar programas feitos para CNC de 5 eixos usando software CAM, como código G genérico ou arquivos APT. Esses programas/caminhos de ferramentas podem ser facilmente simulados e convertidos em programas de robôs com o RoboDK. Mais informações estão disponíveis nesta seção.
Projeto de Seguimento de Curva é como um projeto de fresagem com robô, mas permite selecionar curvas extraídas da geometria 3D como trajetórias de ferramenta. Também é possível selecionar Importar Curva para importar curvas 3D de arquivos CSV ou TXT. Essas curvas devem ser fornecidas como uma lista de pontos XYZ e, opcionalmente, como um vetor IJK. Mais informações estão disponíveis na seção de Projeto de Seguimento de Curva.
Projeto de Seguimento de Pontos é como um projeto de fresagem com robô, mas permite selecionar pontos extraídos da geometria 3D e criar facilmente um caminho de ferramenta de robô. Também é possível selecionar Importar Pontos para importar pontos 3D de arquivos CSV ou TXT. Esses pontos devem ser fornecidos como uma lista de pontos XYZ e, opcionalmente, como um vetor IJK. Mais informações estão disponíveis na seção de Projeto de Seguimento de Pontos.
Selecione o Projeto de Impressão 3D para gerar um programa de impressão 3D do robô para um objeto específico. O objeto deve estar disponível na estação RoboDK. A trajetória da ferramenta de impressão 3D é convertido em código G nos bastidores usando um Slicer e, em seguida, é tratada como um caminho de ferramenta de usinagem de 3 eixos. Mais informações disponíveis na seção de impressão 3D com robô.
O teste Ballbar Accuracy permite verificar o desempenho do robô usando um dispositivo Telescoping Double Ballbar. Mais informações sobre o teste de ballbar do robô estão disponíveis aqui: https://robodk.com/ballbar-test.
Calibrar Robô permite a configuração de um projeto de calibração para melhorar a precisão e encontrar os parâmetros de erro do robô. Um robô calibrado pode ser usado em qualquer projeto de programação off-line do RoboDK. A calibração do robô geralmente melhora a precisão do robô em um fator de 5 ou mais, dependendo do modelo do robô. A calibração requer o uso de sistemas de medição para fazer as medições do robô. A precisão e a repetibilidade do robô podem ser testadas com a ISO9283 antes e/ou depois da calibração. Mais informações sobre calibração de robôs e testes de desempenho aqui: https://robodk.com/robot-calibration.
Observação: algumas dessas ferramentas podem exigir uma licença específica que amplia a licença padrão de programação off-line.
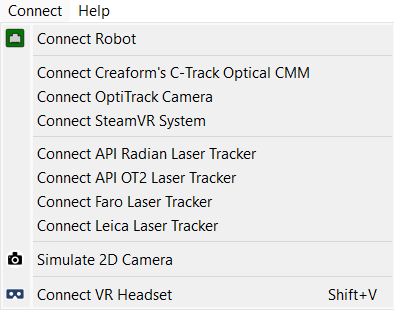
Menu Conectar
É possível conectar-se a um robô e inserir os parâmetros de conexão, como o IP do robô, o nome de usuário do FTP e a senha do FTP. A configuração de uma conexão com o robô permite a transferência de programas por FTP ou a execução de programas diretamente do PC.
Novos drivers de robô podem ser desenvolvidos por usuários finais; mais informações estão disponíveis na seção de drivers de robô.
Também é possível conectar-se a sistemas de medição, como rastreadores a laser ou o Creaform Optical CMM. Isso permite automatizar totalmente a calibração do robô e o teste de desempenho.
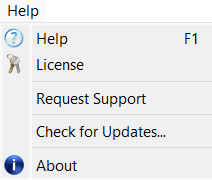
Menu Ajuda
A seleção da ajuda no RoboDK abre essa documentação on-line. Além disso, quando você pressiona F1, o RoboDK exibe o tópico da Ajuda relacionado ao item atualmente selecionado.
Selecione Verificar Atualizações... para verificar se há uma atualização disponível. Uma mensagem aparecerá com uma atualização recomendada ou apenas notificando que a versão atual já está atualizada. Se nenhuma mensagem for exibida, isso significa que um firewall está bloqueando a comunicação entre o RoboDK e a Internet.