Painel do Robô
Clique duas vezes em um robô para abrir o painel do robô (você pode clicar duas vezes nele na árvore ou na visualização 3D). É possível movimentar os eixos do robô usando a seção Movimentar eixos e inserir valores específicos do eixo nas caixas de texto. Os valores dos eixos e as coordenadas do robô devem corresponder aos valores exibidos pelo controlador do robô.
Você pode clicar duas vezes nos limites dos eixos para modificar os limites do eixo do robô. Por padrão, o RoboDK usa os mesmos limites de articulação usados pelo controlador do robô (limites físicos de hardware). Alguns aplicativos podem exigir limites de articulação mais restritos (limites de software). Os valores dos eixos podem ser copiados

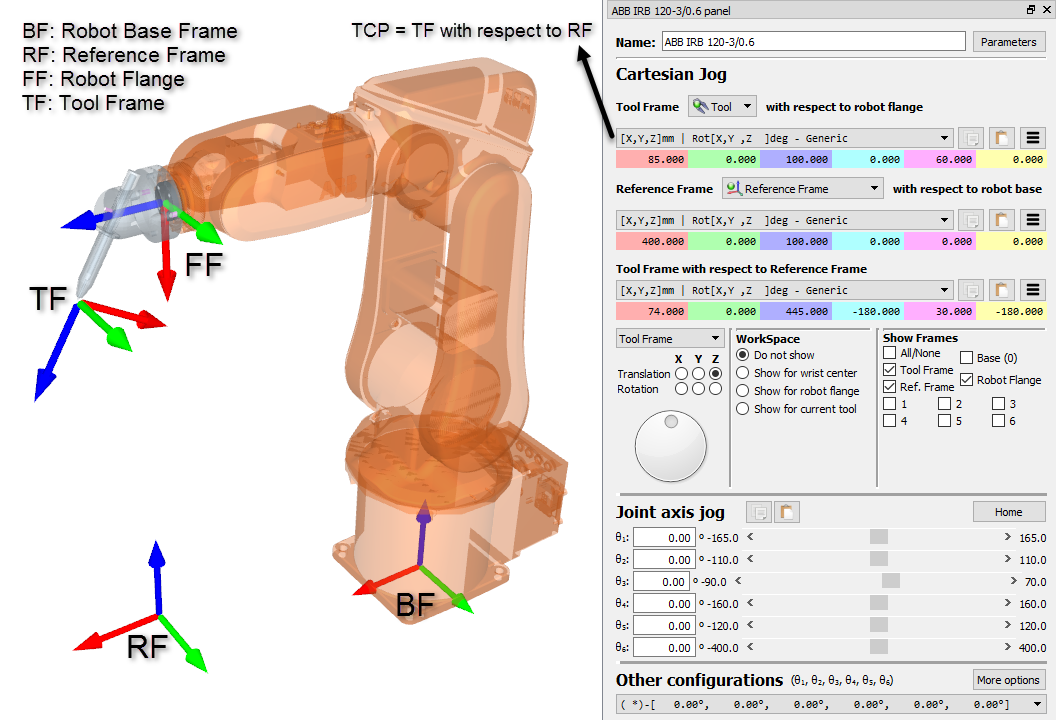
A seção Movimento Cartesiano exibe todas as informações relacionadas à cinemática do robô:
●O frame da ferramenta (TF) em relação ao flange do robô (FF) define onde o frame da ferramenta selecionada está localizada em relação ao flange do robô. O flange do robô é sempre o mesmo, mas O frame da ferramenta muda de acordo com a ferramenta que está montada no robô. Essa relação também é conhecida como UTOOL, ToolData ou apenas Tool na maioria dos controladores de robôs. A ferramenta do robô também é conhecida como TCP (Tool Center Point, ponto central da ferramenta). A ferramenta selecionada se torna a ferramenta "ativa". A ferramenta ativa é usada na criação de novos pontos e programas. A ferramenta selecionada exibe uma marca verde em seu ícone: .
●O Frame de Referência (RF) em relação à Base do Robô (BF) define onde o Frame de Referência está localizado em relação ao Frame da Base do Robô. O frame da base do robô nunca se move; no entanto, diferentes frames de referência podem ser usados para posicionar qualquer objeto em relação à mesma frame da base do robô. Essa relação também é conhecida como UFRAME, WorkObject MFRAME ou Referência na maioria dos controladores de robôs. O Frame de Referência selecionado no painel do robô torna-se o Frame de Referência "Ativo". O Frame de Referência ativo é usado como referência para novos pontos e programas do robô. O Frame de Referência selecionado exibe uma marca verde em seu ícone: .
●O Frame da Ferramenta (TF) com relação ao Frame de Referência (RF) mostra a posição do TCP ativo com relação ao Frame de Referência ativo para a posição atual do robô. Modifique esse valor para mover o robô. Os eixos das articulações são recalculados automaticamente. Essas coordenadas cartesianas são registradas quando um novo ponto é criado (Programa ➔ Marcar Ponto), juntamente com os eixos do robô. O ponto também é anexado ao Frame de Referência ativo.
Uma lista de configurações possíveis está disponível na seção Outras configurações. A configuração do robô define um estado específico do robô sem cruzar nenhuma singularidade. A alteração da configuração requer o cruzamento de uma singularidade. Mais informações estão disponíveis na seção Configurações do robô.
Por fim, o botão Parâmetros no canto superior direito permite fazer alguns ajustes cinemáticos, selecionar o pós-processador preferido ou extrair parâmetros precisos após um projeto de calibração do robô. A modificação desses valores só deve ser necessária em circunstâncias específicas.