Ponto do robô
Os pontos do robô permitem que você registre posições específicas do robô para que ele possa ser movido para esse local.
Siga estas etapas para adicionar um novo ponto e ver as informações anexadas a ele:
●Selecione Programa ➔
Isso registrará a posição atual do robô usando os Frames de Referência 

●Clique com o botão direito do mouse em um ponto e selecione Mais Opções... (F3) para ver os valores de pose e articulação registrados.
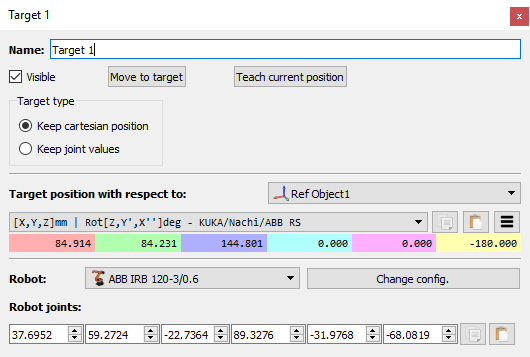
A criação de um novo ponto registra o TCP em relação ao Frame de Referência no espaço cartesiano, bem como os eixos atuais do robô. Por padrão, o RoboDK cria pontos como pontos cartesianos (Manter Posições Cartesianas 
Por outro lado, é possível especificar o ponto angular no espaço (Manter valores de eixo 
É uma prática comum usar pontos conjuntos para alcançar uma primeira posição de aproximação próxima à área de trabalho; depois, os pontos cartesianos garantem que o trajetória da ferramenta não seja alterado se o Frame de Referência ou os quadros da ferramenta forem modificados.
É possível ver outras configurações para alcançar a mesma pose com o robô. Mais informações na próxima seção.