Interface
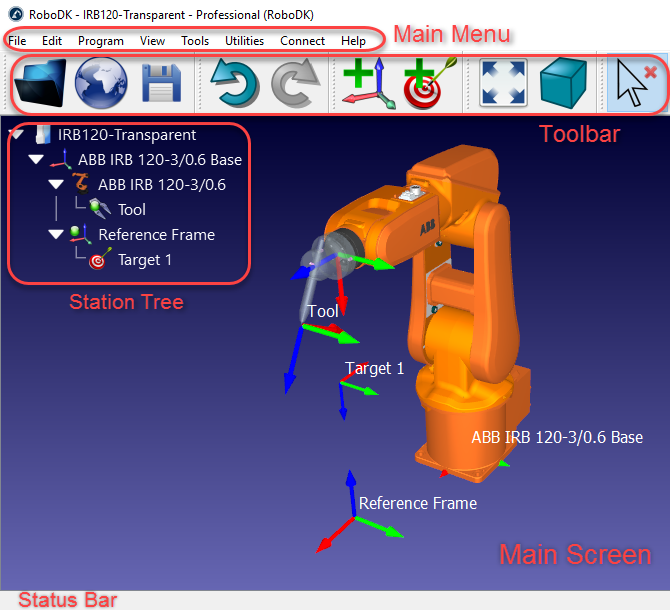
Este documento fornece uma visão geral da interface principal do RoboDK. A interface principal é composta pelo menu principal, a barra de ferramentas, a árvore de estações, a barra de status e a visualização 3D.
●O Menu principal está localizado na parte superior. Todas as ações e opções disponíveis estão disponíveis nesse menu.
●A barra de ferramentas contém ícones gráficos que permitem acesso rápido às ações usadas com frequência no menu. Mais informações estão disponíveis na seção Barra de Ferramentas.
●A árvore de estações lista todos os componentes (itens) presentes na estação. Esses itens podem ser robôs, ferramentas, objetos, pontos ou configurações específicas para fins de fabricação ou calibração. A árvore permite compreender e modificar a dependência que existe no ambiente real. Por exemplo, um ponto pode ser anexado a um frame de referência específico, esse frame de referência pode ser anexado ao frame de base do robô, as ferramentas do robô geralmente são anexadas ao robô etc.
●A barra de status está localizada na parte inferior e pode exibir dicas úteis para determinadas operações.
●A visualização 3D (tela principal) exibe a visualização em um ambiente virtual 3D e reproduz a árvore de estações com sua hierarquia
Clicar duas vezes em um item (na árvore ou na visualização 3D) exibirá uma nova janela com as propriedades do item. Por exemplo, clicar duas vezes em um robô exibirá o Painel do robô. Essas janelas podem ser fechadas selecionando a cruz no canto superior direito da subjanela.
Como exceção, clicar duas vezes em um ponto moverá o robô para esse ponto. Se um ponto for selecionado apenas uma vez (em vez de ser clicado duas vezes), o robô simulará um movimento linear ou angular de sua posição atual para esse ponto.
Painel do Robô
Clique duas vezes em um robô para abrir o painel do robô (você pode clicar duas vezes nele na árvore ou na visualização 3D). É possível movimentar os eixos do robô usando a seção Movimentar eixos e inserir valores específicos do eixo nas caixas de texto. Os valores dos eixos e as coordenadas do robô devem corresponder aos valores exibidos pelo controlador do robô.
Você pode clicar duas vezes nos limites dos eixos para modificar os limites do eixo do robô. Por padrão, o RoboDK usa os mesmos limites de articulação usados pelo controlador do robô (limites físicos de hardware). Alguns aplicativos podem exigir limites de articulação mais restritos (limites de software). Os valores dos eixos podem ser copiados

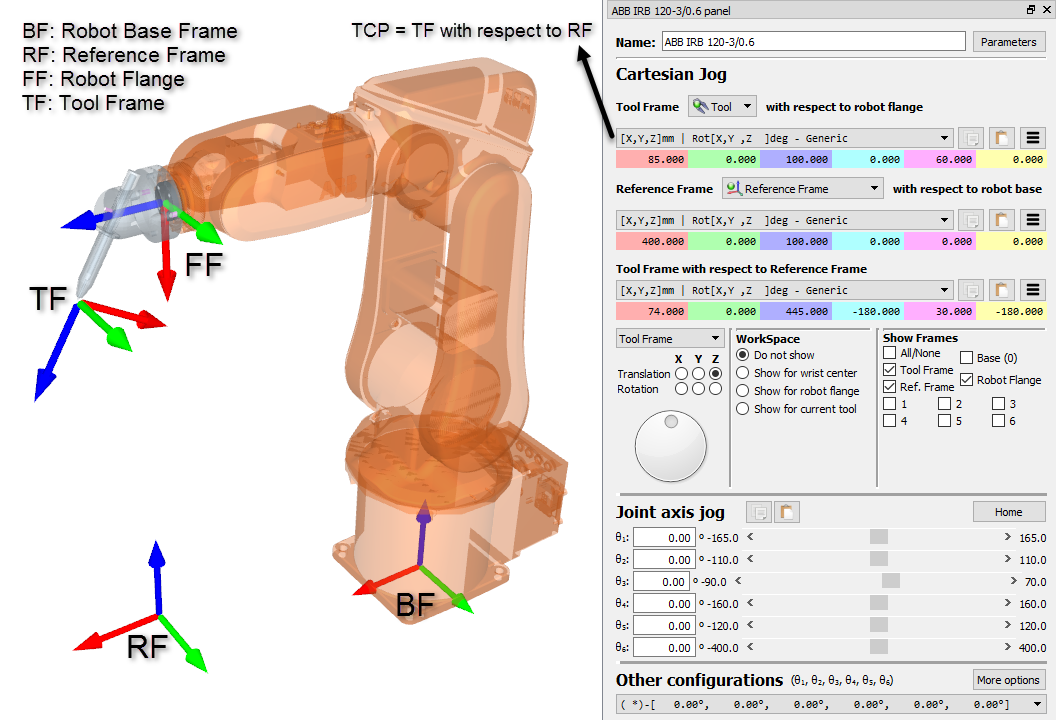
A seção Movimento Cartesiano exibe todas as informações relacionadas à cinemática do robô:
●O frame da ferramenta (TF) em relação ao flange do robô (FF) define onde o frame da ferramenta selecionada está localizada em relação ao flange do robô. O flange do robô é sempre o mesmo, mas O frame da ferramenta muda de acordo com a ferramenta que está montada no robô. Essa relação também é conhecida como UTOOL, ToolData ou apenas Tool na maioria dos controladores de robôs. A ferramenta do robô também é conhecida como TCP (Tool Center Point, ponto central da ferramenta). A ferramenta selecionada se torna a ferramenta "ativa". A ferramenta ativa é usada na criação de novos pontos e programas. A ferramenta selecionada exibe uma marca verde em seu ícone: .
●O Frame de Referência (RF) em relação à Base do Robô (BF) define onde o Frame de Referência está localizado em relação ao Frame da Base do Robô. O frame da base do robô nunca se move; no entanto, diferentes frames de referência podem ser usados para posicionar qualquer objeto em relação à mesma frame da base do robô. Essa relação também é conhecida como UFRAME, WorkObject MFRAME ou Referência na maioria dos controladores de robôs. O Frame de Referência selecionado no painel do robô torna-se o Frame de Referência "Ativo". O Frame de Referência ativo é usado como referência para novos pontos e programas do robô. O Frame de Referência selecionado exibe uma marca verde em seu ícone: .
●O Frame da Ferramenta (TF) com relação ao Frame de Referência (RF) mostra a posição do TCP ativo com relação ao Frame de Referência ativo para a posição atual do robô. Modifique esse valor para mover o robô. Os eixos das articulações são recalculados automaticamente. Essas coordenadas cartesianas são registradas quando um novo ponto é criado (Programa ➔ Marcar Ponto), juntamente com os eixos do robô. O ponto também é anexado ao Frame de Referência ativo.
Uma lista de configurações possíveis está disponível na seção Outras configurações. A configuração do robô define um estado específico do robô sem cruzar nenhuma singularidade. A alteração da configuração requer o cruzamento de uma singularidade. Mais informações estão disponíveis na seção Configurações do robô.
Por fim, o botão Parâmetros no canto superior direito permite fazer alguns ajustes cinemáticos, selecionar o pós-processador preferido ou extrair parâmetros precisos após um projeto de calibração do robô. A modificação desses valores só deve ser necessária em circunstâncias específicas.
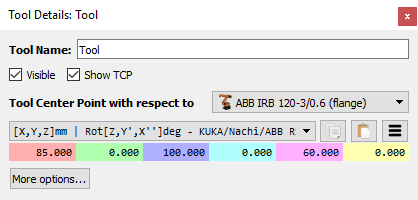
Ferramenta do robô (TCP)
Clique duas vezes em uma ferramenta do robô
A seleção de Mais opções... permite aplicar um fator de escala à geometria da ferramenta ou mover a geometria em relação ao flange do robô. A alteração desses valores não tem impacto sobre os programas do robô. A geometria é usada para fins de exibição e verificação de colisão. (mantendo o TCP intacto).
Frame de Referência
Clique duas vezes em um Frame de Referência
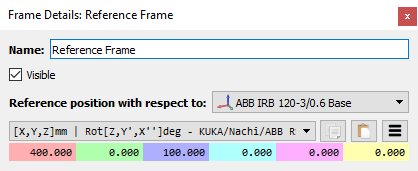
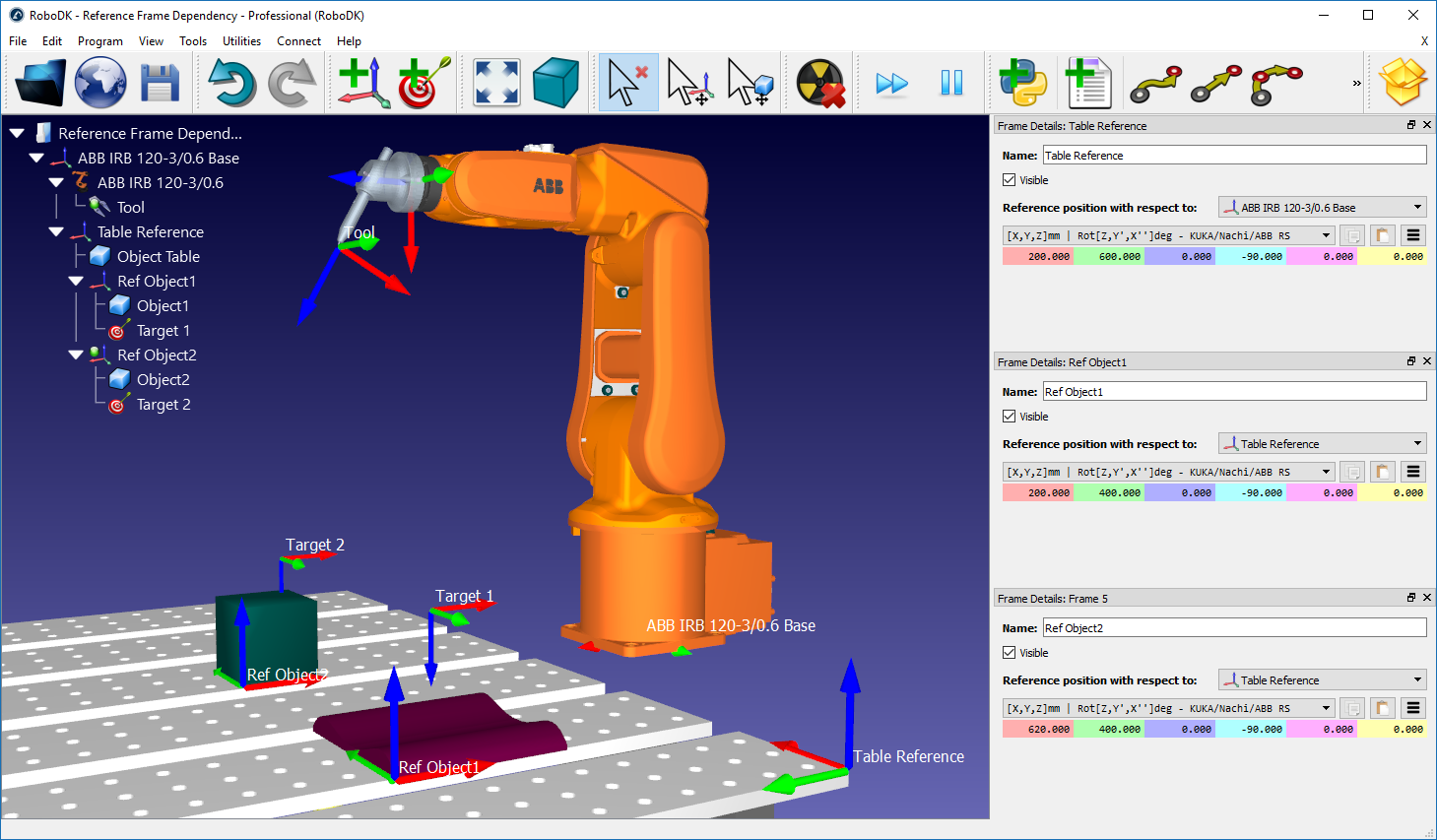
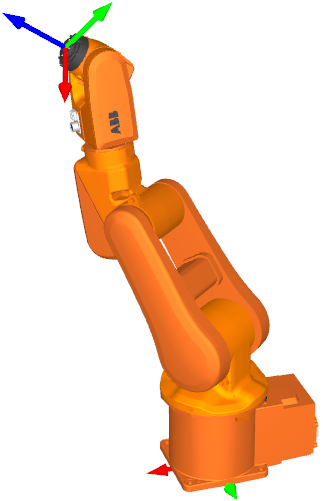
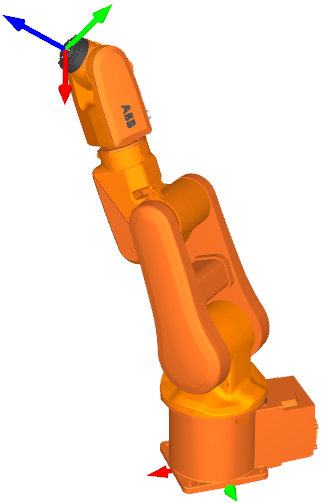
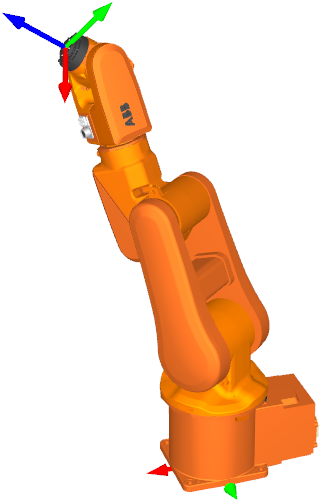
Vários frames de referência podem ser relacionados uns aos outros para criar a dependência que existe em um aplicativo real. Por exemplo, uma mesa pode ter uma posição específica em relação ao robô. Em seguida, dois ou mais objetos na mesa podem ter uma posição específica em relação à referência da mesa. Mover a referência da mesa não alterará a relação entre os objetos e a mesa, mas alterará a relação de todos os objetos com relação ao robô. A imagem a seguir mostra esse exemplo.
Ponto do robô
Os pontos do robô permitem que você registre posições específicas do robô para que ele possa ser movido para esse local.
Siga estas etapas para adicionar um novo ponto e ver as informações anexadas a ele:
●Selecione Programa ➔
Isso registrará a posição atual do robô usando os Frames de Referência
●Clique com o botão direito do mouse em um ponto e selecione Mais Opções... (F3) para ver os valores de pose e articulação registrados.
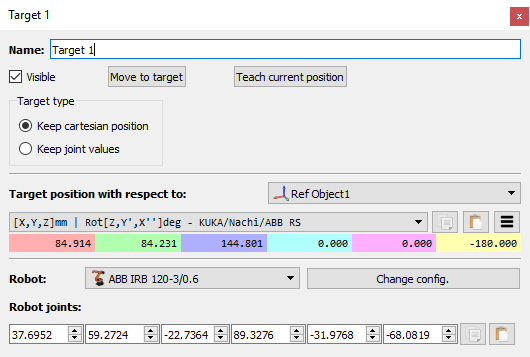
A criação de um novo ponto registra o TCP em relação ao Frame de Referência no espaço cartesiano, bem como os eixos atuais do robô. Por padrão, o RoboDK cria pontos como pontos cartesianos (Manter Posições Cartesianas 
Por outro lado, é possível especificar o ponto angular no espaço (Manter valores de eixo 
É uma prática comum usar pontos conjuntos para alcançar uma primeira posição de aproximação próxima à área de trabalho; depois, os pontos cartesianos garantem que o trajetória da ferramenta não seja alterado se o Frame de Referência ou os quadros da ferramenta forem modificados.
É possível ver outras configurações para alcançar a mesma pose com o robô. Mais informações na próxima seção.
Configurações do robô
Uma configuração do robô define um estado específico dele. Para alterar a configuração, é necessário atravessar uma singularidade. Os robôs não podem atravessar uma singularidade quando um movimento linear está sendo feito (para isso, seria necessário um movimento angular).
Em outras palavras, para realizar um movimento linear entre dois pontos, a configuração do robô deve ser a mesma para todo o movimento, incluindo o primeiro e o último pontos.
Clique com o botão direito do mouse em um robô e selecione Alterar configuração para abrir a janela de configurações do robô. Também é possível abrir essa janela selecionando Mais opções no painel do robô.
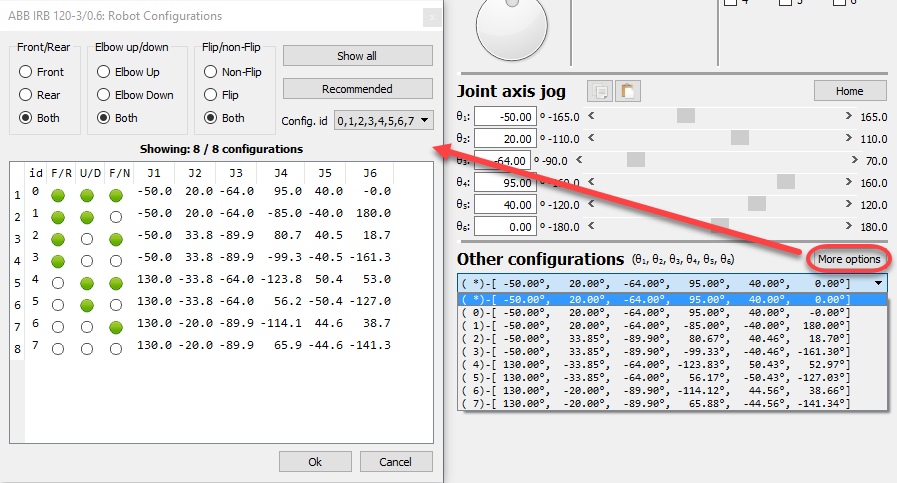
Para um robô padrão de 6 eixos, normalmente há 8 configurações diferentes para qualquer posição do robô, se presumirmos que cada eixo do robô pode se mover uma volta completa. Na prática, os limites dos eixos podem ser mais ou menos restritos, dependendo do robô. Portanto, pode ser possível ter de 1 a mais de 100 configurações diferentes de robô para um local específico, dependendo do robô.
Uma configuração de robô define uma maneira específica (modo de montagem) de alcançar uma posição com o robô. Por exemplo, o robô pode ter o cotovelo para cima ou para baixo (Up vs. Down, ou U/D), ao mesmo tempo em que pode estar de frente para o ponto ou a base pode girar 180 graus para alcançar o ponto de costas (Front vs. Rear, ou F/R). Por fim, a articulação 5 pode virar trocando o sinal ao mesmo tempo em que o eixo 4 e o eixo 6 compensam esse movimento (Flip vs. Non-Flip, ou F/N). No total, isso fornece as configurações 2*2*2=8.
Configurações de objeto
Os objetos podem ser carregados no RoboDK usando formatos de arquivo 3D, como STL, STEP ou IGES. Clique duas vezes em um objeto na árvore ou na visualização 3D para abrir a janela de configurações
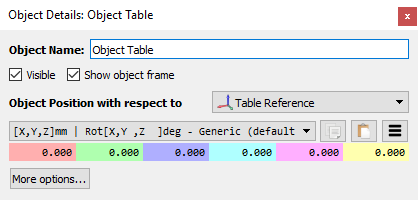
É possível definir ou visualizar a posição em relação a qualquer Frame de Referência. No entanto, os objetos geralmente são vinculados a frames de referência e é recomendável mover o Frame de Referência se um objeto precisar ser movido. Os objetos também podem ser agarrados pelas ferramentas do robô após a ocorrência de um determinado evento de simulação.
O menu Mais opções... permite alterar a cor do objeto, aplicar um fator de escala ou mover a geometria em relação ao seu próprio Frame de Referência.
Menu principal
O menu principal é dividido nas seguintes seções:
1.Menu Arquivo:Permite importar novos arquivos (geometria 3D, robôs, ferramentas, caminhos de ferramentas, ...) e abrir ou salvar projetos do RoboDK (extensão de arquivo RDK).
2.Menu Editar:Permite cortar/copiar/colar um item ou um grupo de itens e desfazer/refazer ações.
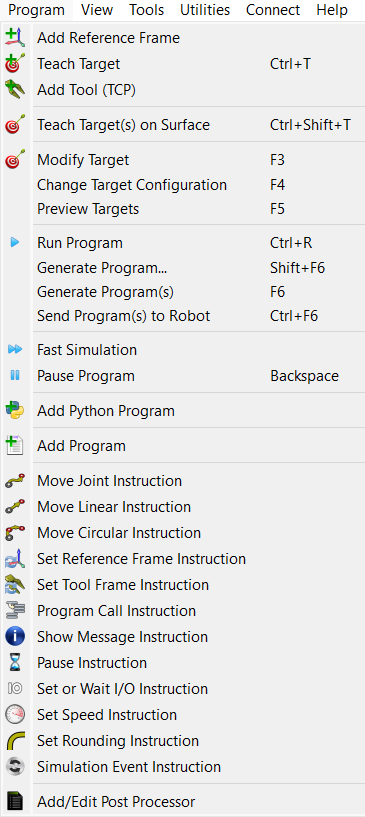
3.Menu Programa:Permite criar ou modificar os programas do robô e outras opções relacionadas à programação off-line (OLP).
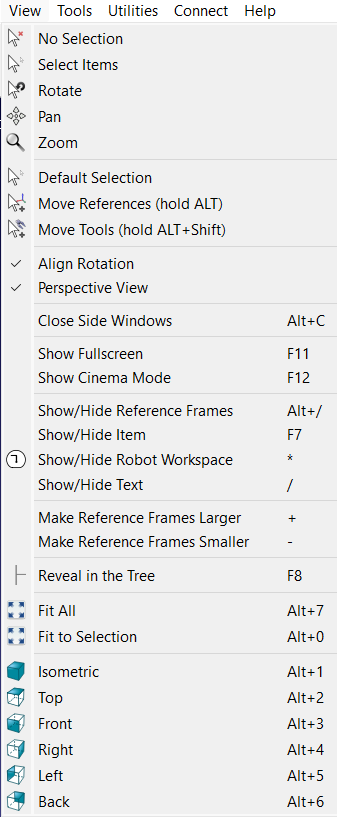
4.Menu Visualizar: Oferece ações úteis para navegar em 3D e configurar visualizações específicas.
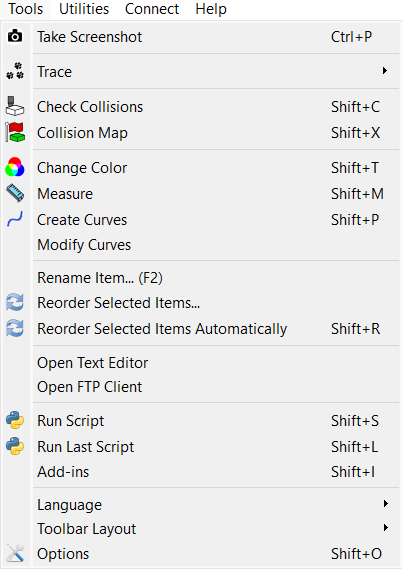
5.Menu Ferramentas:Fornece ferramentas gerais, como verificação de colisões, medição de pontos ou abertura das opções principais.
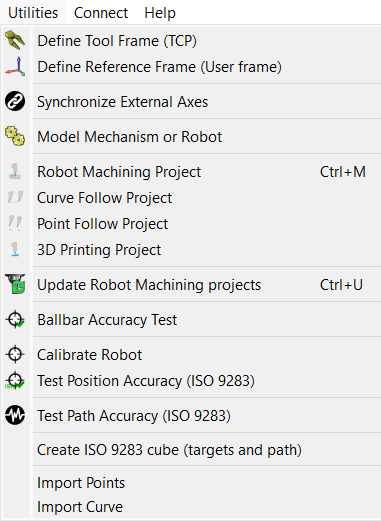
6.Menu Utilitários:Permite realizar operações específicas, como usar robôs para operações de manufatura, calibrar um TCP ou um Frame de Referência, usar robôs como uma impressora 3D ou como um CNC de 5 eixos, calibrar um robô... Essas operações podem exigir uma opção de licença específica.
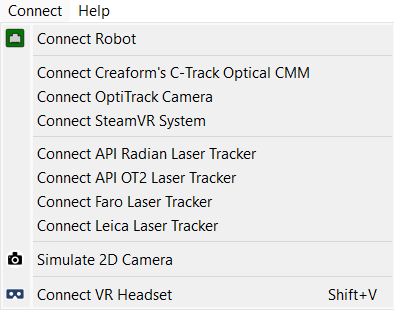
7.Menu Conectar: Permite conectar-se a um robô, a um sistema de medição ou simular câmeras.
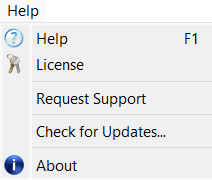
8.Menu Ajuda:Permite abrir a documentação on-line (F1), verificar se há atualizações ou configurar uma licença.
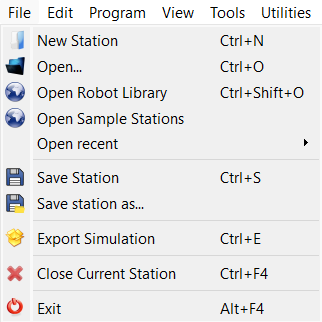
Menu Arquivo
O Menu Arquivo permite que você abra e salve projetos do RoboDK. Você também pode carregar qualquer tipo de arquivo suportado pelo RoboDK ou exportar seu projeto usando diferentes formatos ou métodos.






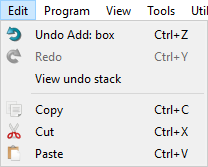
Menu Editar
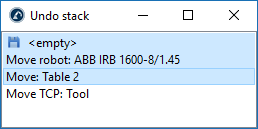
As ações Desfazer (Ctrl+Z) e Refazer (Ctrl+Y) podem ser acessadas no menu Editar. O histórico de ações de desfazer também está disponível e permite reverter as alterações, para trás ou para frente, para um estado específico, selecionando a ação.
Também é possível
Menu Programa
O menu Programa contém todos os componentes relacionados à programação off-line (OLP) e à geração de programas. É possível adicionar novos programas, frames de referência, pontos ou ferramentas aos robôs. Esses componentes de programação off-line (frames de referência, ferramentas, pontos etc.) aparecem em todos os programas gerados off-line.



A seção Instruções de programa do documento Programação off-line fornece mais informações sobre as instruções de programa disponíveis por meio da GUI.

Por fim, é possível
Menu Exibir
A maioria das opções necessárias para navegar em 3D está disponível no menu Exibir. É possível girar, deslocar e aplicar zoom nesse menu (bem como clicar com o botão direito do mouse na visualização 3D). Isso é útil para navegar em 3D usando um touchpad de laptop (em vez de um mouse).
Para permitir uma rotação livre em qualquer direção, desmarque a opção: Exibir ➔ Alinhar rotação. Caso contrário, o RoboDK bloqueia a referência da estação para manter o plano XY horizontal por padrão.
É possível mostrar ou ocultar o espaço de trabalho do robô selecionando a tecla asterisco (*). Também é possível alternar entre itens visíveis e invisíveis selecionando a tecla F7.
Menu Ferramentas
Você pode acessar ferramentas genéricas no Menu Ferramentas, como fazer medições em 3D, ativar a verificação de colisões ou ativar o rastreamento do robô.
A ativação 


É possível especificar o idioma da interface do RoboDK selecionando Ferramentas ➔ Idioma e selecionando o idioma preferido. O RoboDK será exibido imediatamente no idioma selecionado.
O Layout da barra de ferramentas permite configurar a barra de ferramentas padrão. Como alternativa, é possível especificar uma barra de ferramentas para um uso mais básico ou mais avançado.
Selecione
Menu Utilitários
O menu Utilitários permite executar tarefas específicas para configurar o robô e realizar operações de manufatura específicas, como usinagem, perfuração ou impressão 3D do robô.



Selecione o Projeto de Impressão 3D para gerar um programa de impressão 3D do robô para um objeto específico. O objeto deve estar disponível na estação RoboDK. A trajetória da ferramenta de impressão 3D é convertido em código G nos bastidores usando um Slicer e, em seguida, é tratada como um caminho de ferramenta de usinagem de 3 eixos. Mais informações disponíveis na seção de impressão 3D com robô.
O teste Ballbar Accuracy permite verificar o desempenho do robô usando um dispositivo Telescoping Double Ballbar. Mais informações sobre o teste de ballbar do robô estão disponíveis aqui: https://robodk.com/ballbar-test.
Menu Conectar
É possível conectar-se a um robô e inserir os parâmetros de conexão, como o IP do robô, o nome de usuário do FTP e a senha do FTP. A configuração de uma conexão com o robô permite a transferência de programas por FTP ou a execução de programas diretamente do PC.
Novos drivers de robô podem ser desenvolvidos por usuários finais; mais informações estão disponíveis na seção de drivers de robô.
Também é possível conectar-se a sistemas de medição, como rastreadores a laser ou o Creaform Optical CMM. Isso permite automatizar totalmente a calibração do robô e o teste de desempenho.
Menu Ajuda
A seleção da ajuda no RoboDK abre essa documentação on-line. Além disso, quando você pressiona F1, o RoboDK exibe o tópico da Ajuda relacionado ao item atualmente selecionado.
Selecione Verificar Atualizações... para verificar se há uma atualização disponível. Uma mensagem aparecerá com uma atualização recomendada ou apenas notificando que a versão atual já está atualizada. Se nenhuma mensagem for exibida, isso significa que um firewall está bloqueando a comunicação entre o RoboDK e a Internet.
Ícones modernos
O RoboDK 5.7 e as versões mais recentes se beneficiam de ícones redesenhados, que podem ser ativados com Ferramentas ➔ Opções ➔ Geral ➔ Usar ícones modernos. A tabela abaixo apresenta uma visão geral dos principais ícones e seu novo design.
Legado | Moderno |
|
|
| Abrir |
|
| Abrir a biblioteca on-line |
|
| Salvar estação |
|
| Desfazer |
|
| Refazer |
|
| Adicionar um Frame de Referência |
|
| Adicionar um novo ponto |
|
| Ajustar tudo |
|
| Vista isométrica Exibir a visualização isométrica 3D padrão |
|
| Mover frames de referência |
|
| Mover TCP (ferramenta de robô) |
|
| Verificar colisões |
|
| Simulação rápida |
|
| Pausar a simulação |
|
| Adicionar Programa |
|
| Adicionar Programa |
|
| Instrução de movimento joint |
|
| Instrução de movimento linear |
|
| Exportar Simulação |