Exemplo de cliente OPC UA
Este exemplo mostrará como você pode adicionar a conectividade do cliente OPC UA ao RoboDK. O RoboDK inclui um Add-in OPC UA que permite a você adicionar compatibilidade OPC UA aos seus projetos do RoboDK.
Neste exemplo, você aprenderá como obter os dados da Estação RoboDK via OPC UA Client.
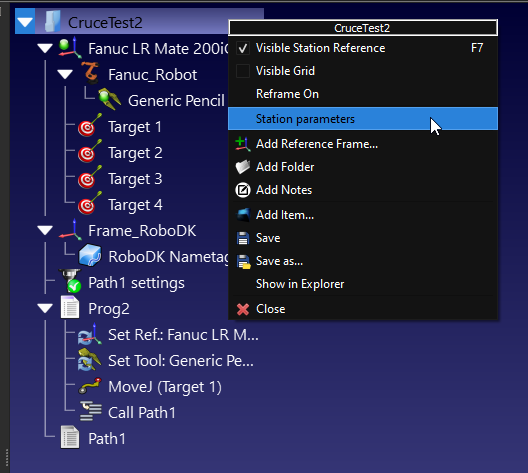
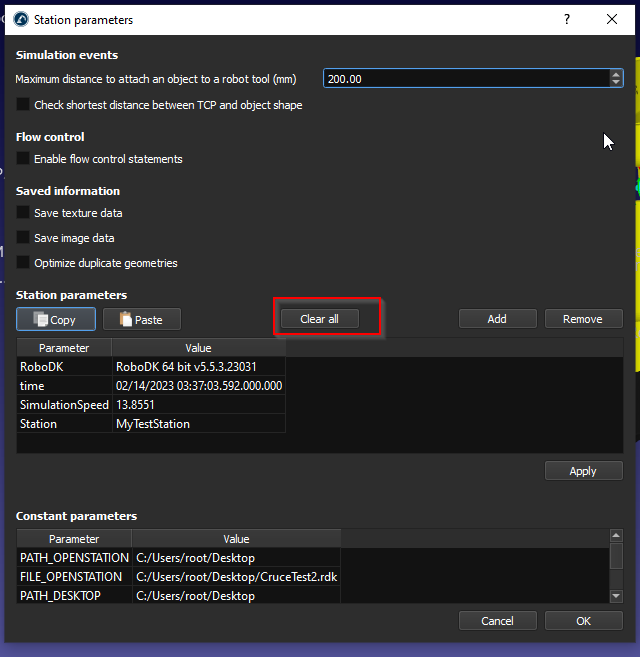
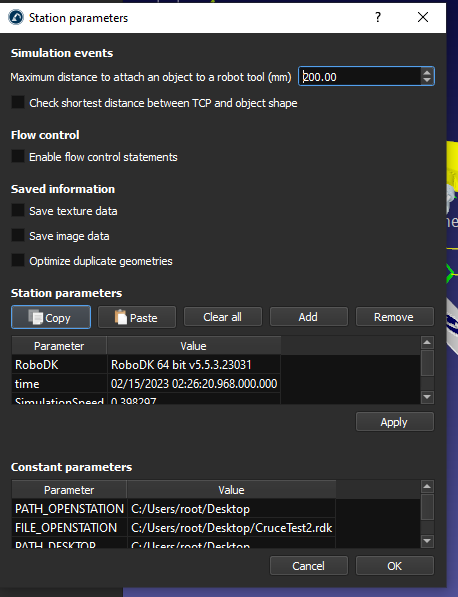
A tela de parâmetros da estação é exibida e pressione "Limpar tudo" para excluir todos os parâmetros da estação.
Implementação com a interface
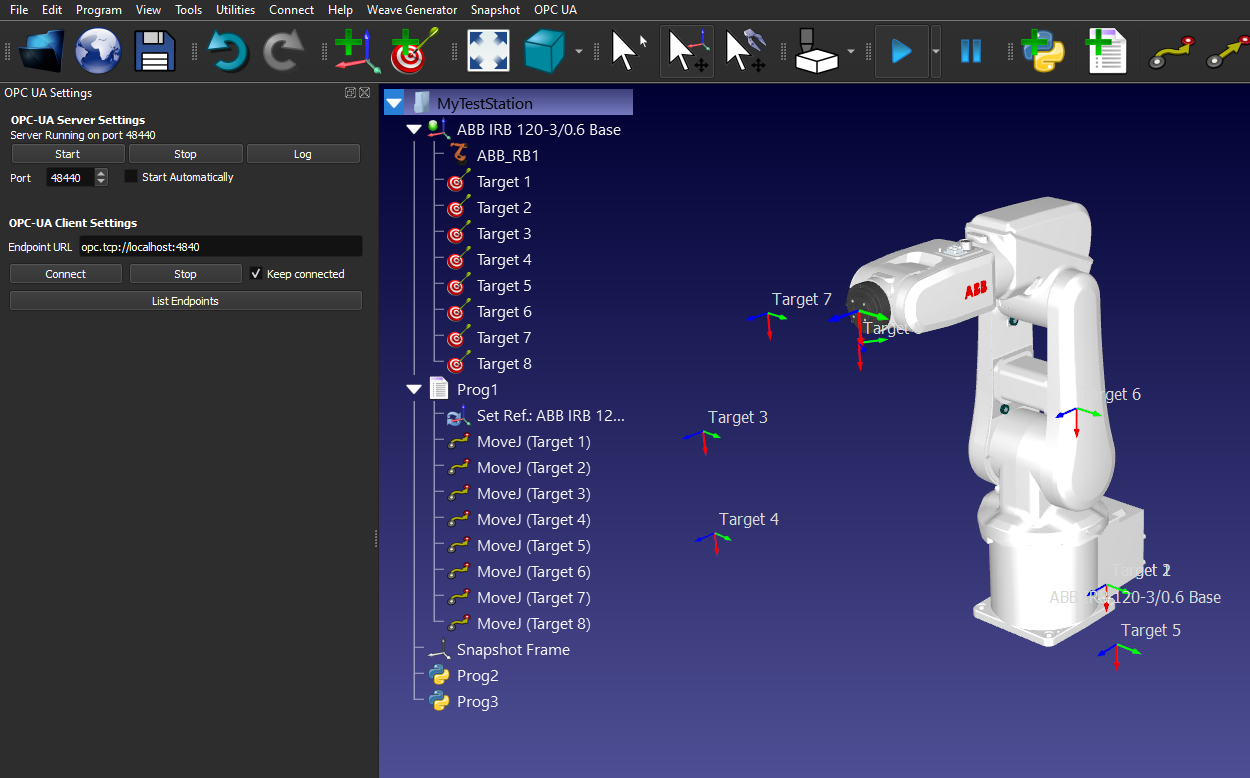
Podemos criar mais um projeto do RoboDK com o servidor OPC UA configurado e iniciado.
Adicionar Cliente
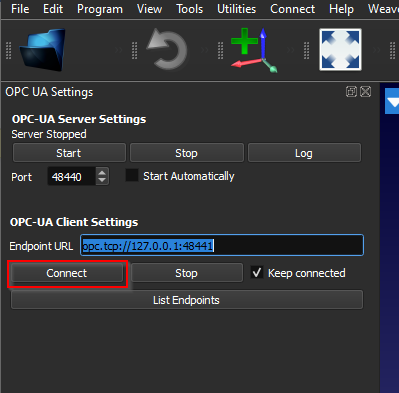
Esta seção mostra como adicionar um cliente OPC UA.
Digite o URL do endpoint, por exemplo: opc.tcp://127.0.0.1:48441.
Você precisa fazer a correspondência do endereço IP e da configuração da porta com o servidor OPC UA de destino.
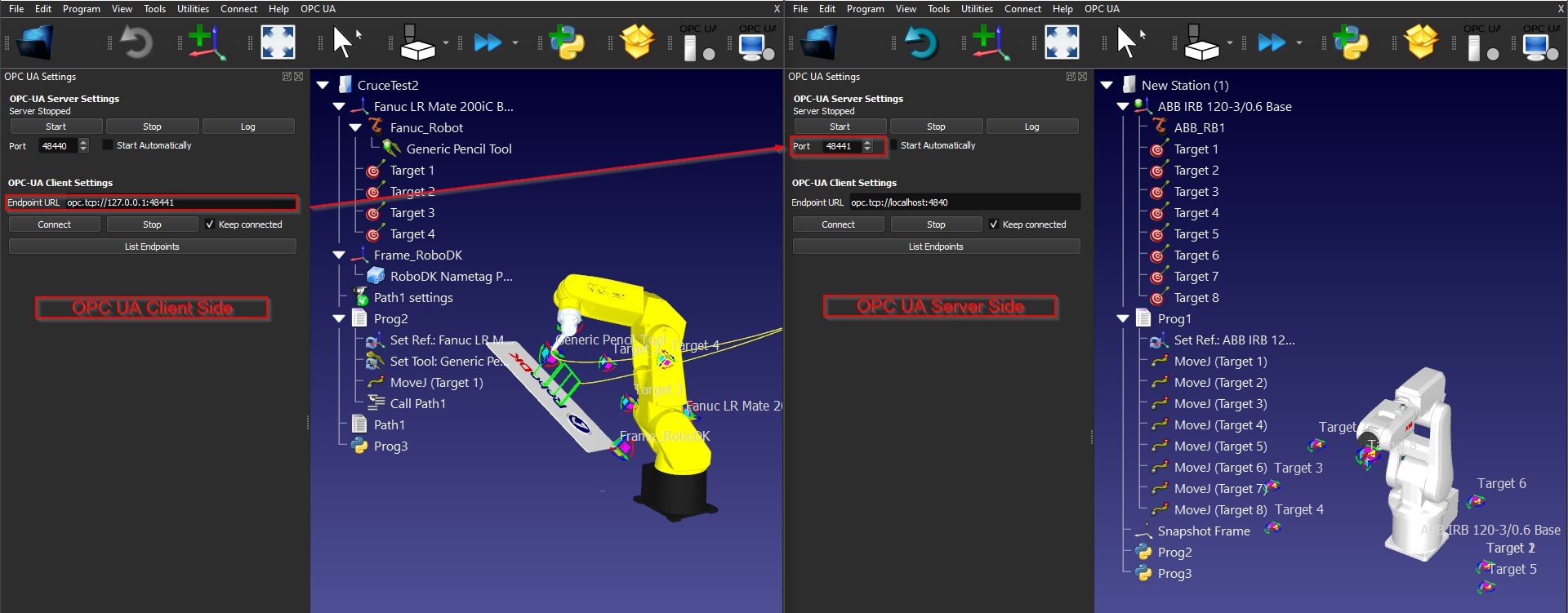
Pressione "Connect" para estabelecer a conexão.
Se houver uma mensagem com "Variáveis do servidor recuperadas. Clique com o botão direito do mouse no item da estação e selecione 'Parâmetro da Estação' para ver as variáveis.", a conexão será estabelecida.
Clique com o botão direito do mouse em sua estação e selecione "Parâmetro da Estação".

Nós de clientes
Você pode verificar os detalhes de cada nó na seção de nós.
Implementação com a API do RoboDK
Depois de obter os dados dos nós do servidor OPC UA por meio do cliente OPC UA no RoboDK, você também pode obter esses dados usando a RoboDK-Python-API.
Instalação
Você pode consultar este link para instalar a Python-API do RoboDK.
https://robodk.com/doc/en/PythonAPI/intro.html#how-to-install
Ou instale manualmente o pacote robodk para Python:
pip install robodk
Script
Este script de exemplo mostra como obter os parâmetros da estação por meio da API Python do RoboDK.
from robodk import robolink # API do RoboDK
RDK = robolink.Robolink()
from robodk import * # API do RoboDK
from robolink import * # Caixa de ferramentas do robô
itemlist = RDK.ItemList()
se itemlist:
# Obter todos os parâmetros da estação
print('Vaild Paramaters are configured in your Station...')
StationParameters=RDK.getParams()
para StationParameter em StationParameters:
print("Parâmetro da Estaçãos %s : %s"%(StationParameter[0],str((StationParameter[1]))))
E mais:
print('No Parameter list...')
Aqui está o resultado do script de exemplo:
Os parâmetros válidos são configurados em sua estação.
Parâmetros da estação RoboDK: RoboDK 64 bit v5.5.3.23031
Hora dos parâmetros da estação: 14/02/2023 03:58:29.191.000.000
Parâmetros da estação VelocidadeDaSimulacao : 13,8551
Parâmetros da estação Estação: MyTestStation