Implementação com UaExpert
Você pode usar o software UaExpert para testar a conectividade com o Servidor RoboDK OPC UA.
Você pode fazer o download da versão gratuita do software UaExpert no site da Unified Automation: https://www.unified-automation.com/downloads/OPC UA-clients.html.
Adicionar servidor no UaExpert
Inicie o UaExpert e clique no botão "+" para adicionar o servidor OPC UA do RoboDK.
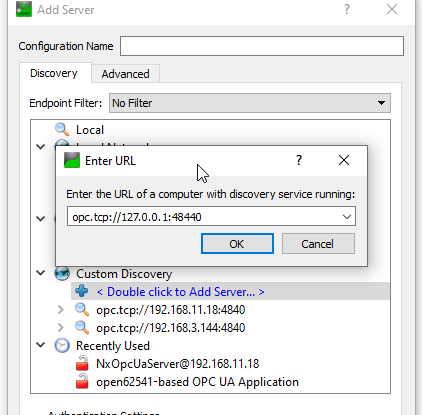
Expanda o Custom Discovery e selecione a opção <Double clicks to Add Server.> para adicionar o Servidor RoboDK OPC UA.
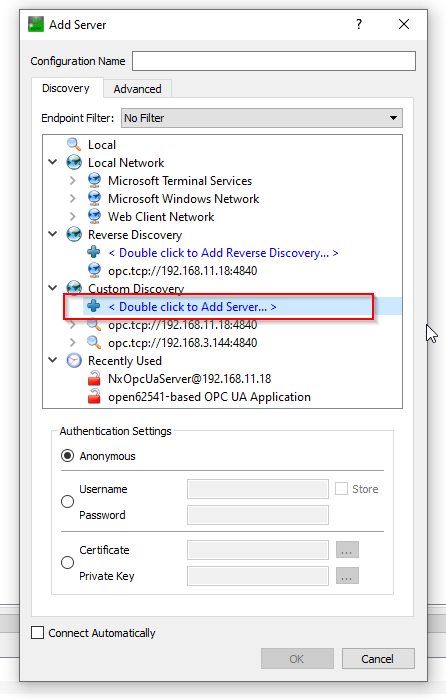
Digite o URL do servidor OPC UA, opc.tcp://127.0.0.1:48440, que você configurou na etapa anterior.
Conecte o servidor OPC UA com a segurança "None".
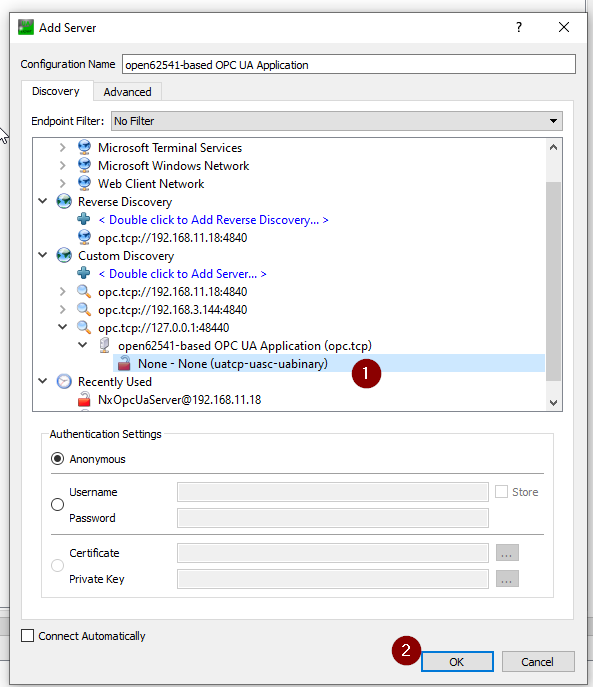
O servidor está configurado.
Conecte-se ao servidor
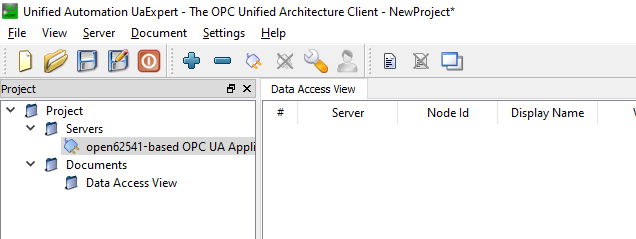
Agora você pode se conectar ao Servidor RoboDK OPC UA a partir do UaExpert.
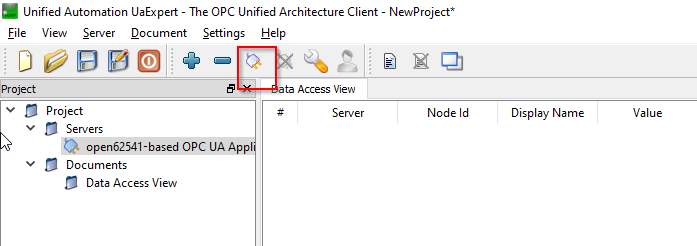
Você pode ver os nós e os métodos quando a conexão for estabelecida.

Nós do servidor
Há alguns nós dentro do servidor OPC UA do RoboDK que permitem que você troque algumas informações básicas sobre a sua estação.
RoboDK
O nó do RoboDK é um nó que fornece a versão real do seu software RoboDK.
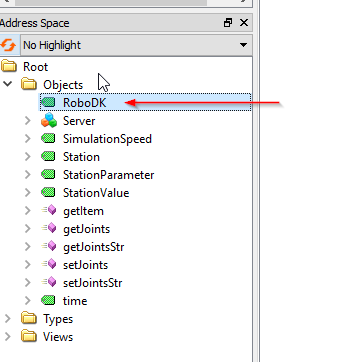
A versão RoboDK 64 Bit v5.5.3.23031 foi usada neste exemplo.

Velocidade de Simulação
Velocidade de simulação é um nó que mostra a velocidade de simulação real e permite que o usuário substitua a velocidade de simulação atual.
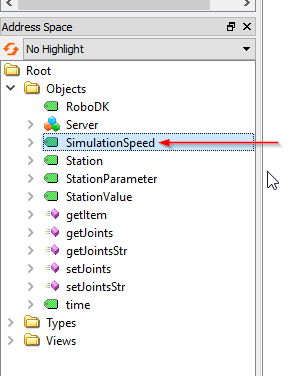
O valor do nó tem como referência a barra deslizante da velocidade de simulação.
A simulação atual pode ser lida a partir desse nó e pode substituir a velocidade da simulação.

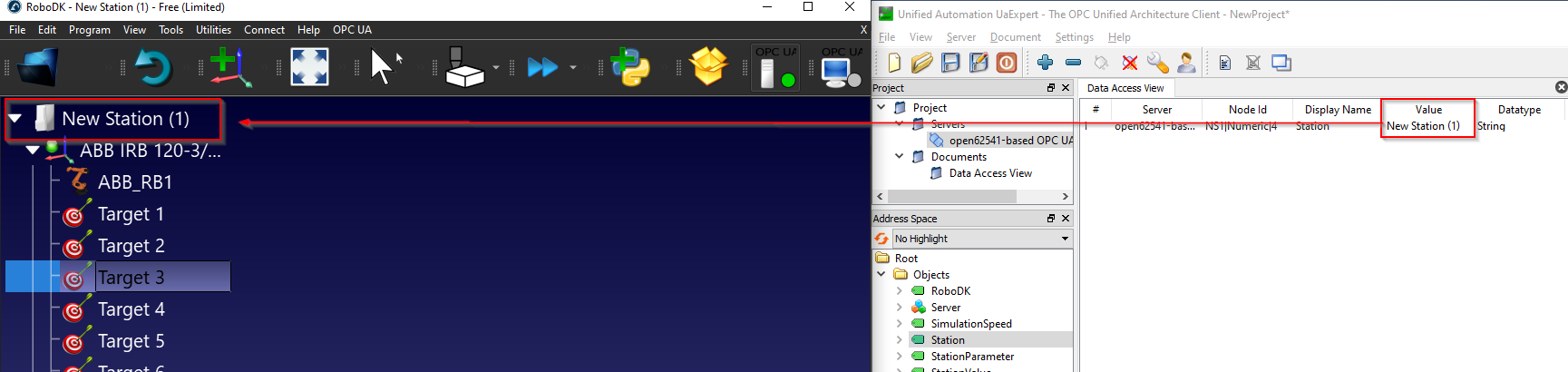
Estação
O Nó Estação é um nó que permite ao usuário obter o nome atual da estação no RoboDK.
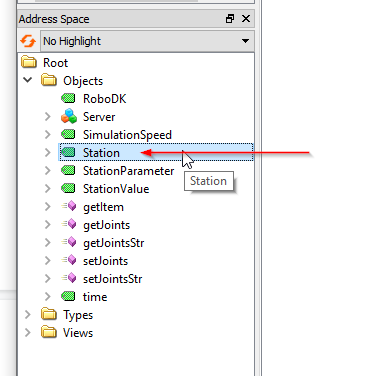
Como você vê abaixo, o nó Station é referenciado ao seu "Nome da Estação" no RoboDK.
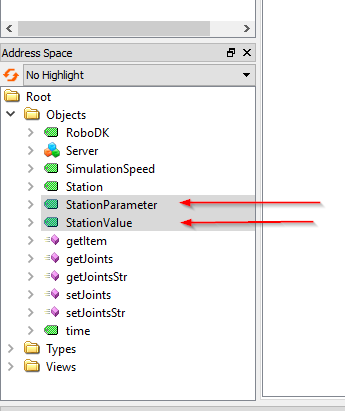
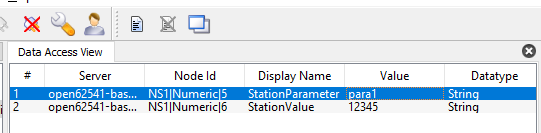
Parâmetros da estação/Valor da estação
Parâmetro da Estação e Valor da Estação são um par de nós que permite ao usuário obter ou definir qualquer parâmetro dentro da estação. O servidor OPC UA do RoboDK monitorará continuamente o valor real de "Parâmetro da estação" e retornará o valor desse "Parâmetro da estação", a partir do nó Valor da Estação.
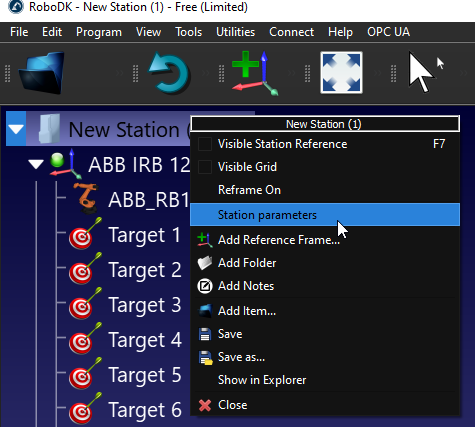
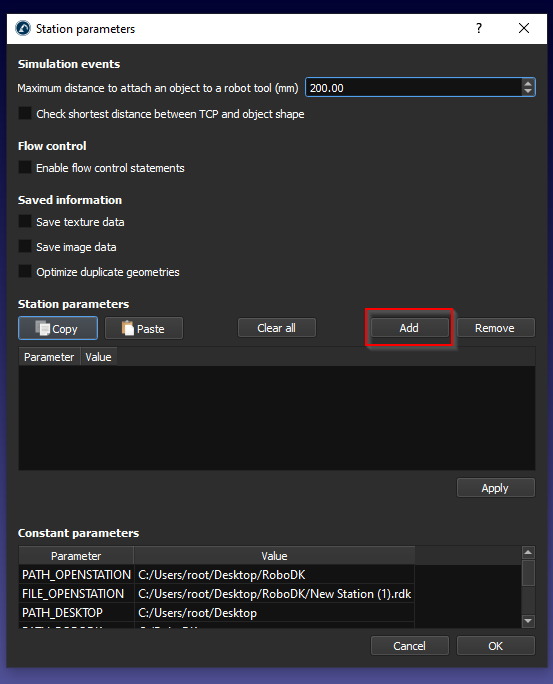
Você pode visualizar os parâmetros da sua estação clicando com o botão direito do mouse na estação RoboDK > Parâmetros da estação.
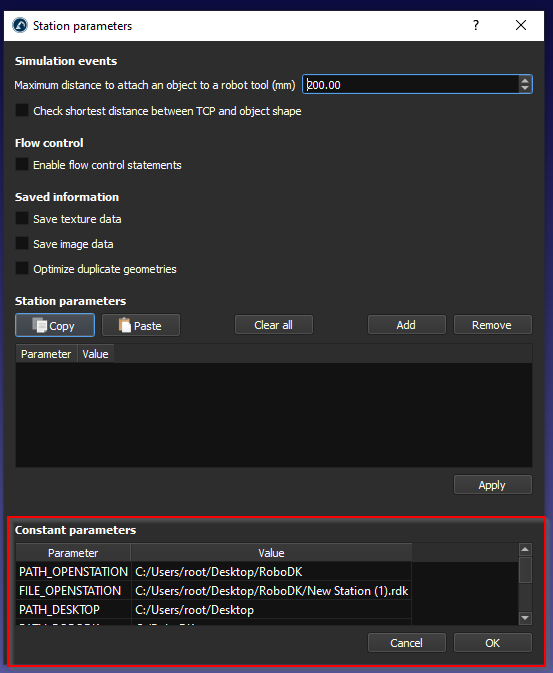
No campo Parâmetros constantes, você pode ver os parâmetros padrão da estação e seus valores.
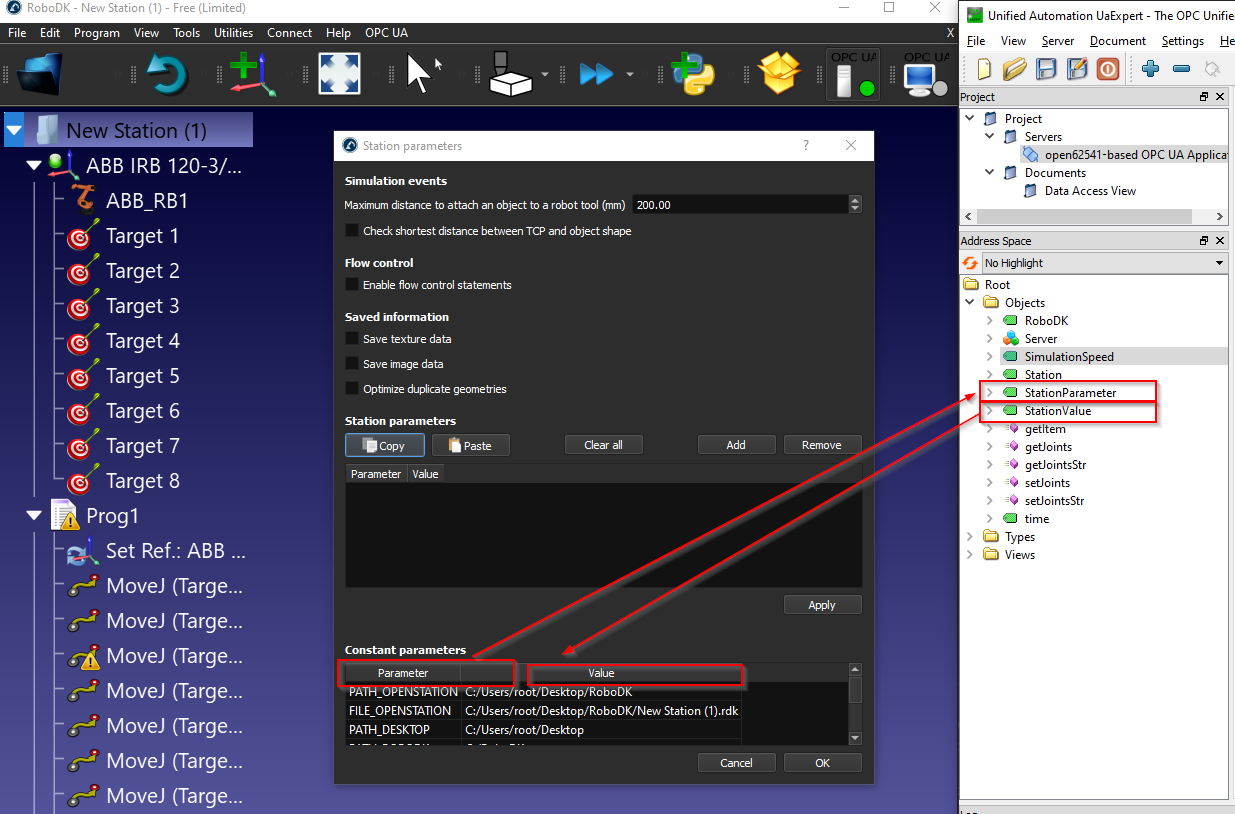
O parâmetro da estação é referenciado no campo "Parâmetro" e o valor da estação é referenciado no campo " Valor".
E podemos criar nossos próprios parâmetros clicando no botão "Adicionar".
Um novo parâmetro Estação foi adicionado.
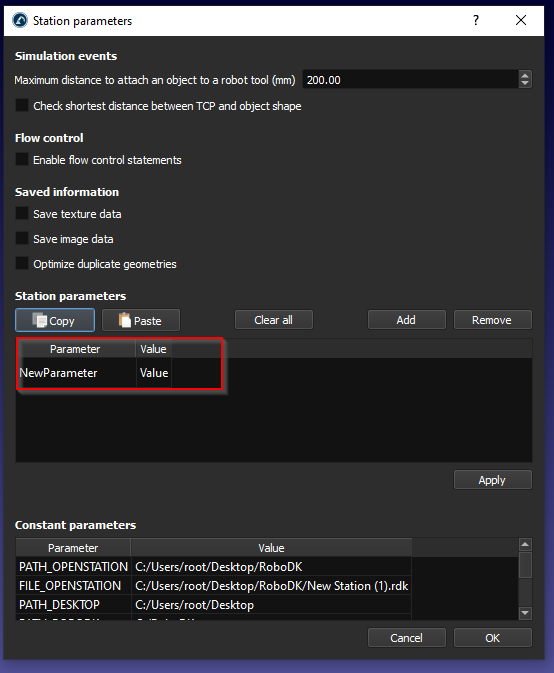
Digite o nome do parâmetro e o valor do parâmetro e, em seguida, pressione Aplicar para salvá-lo.
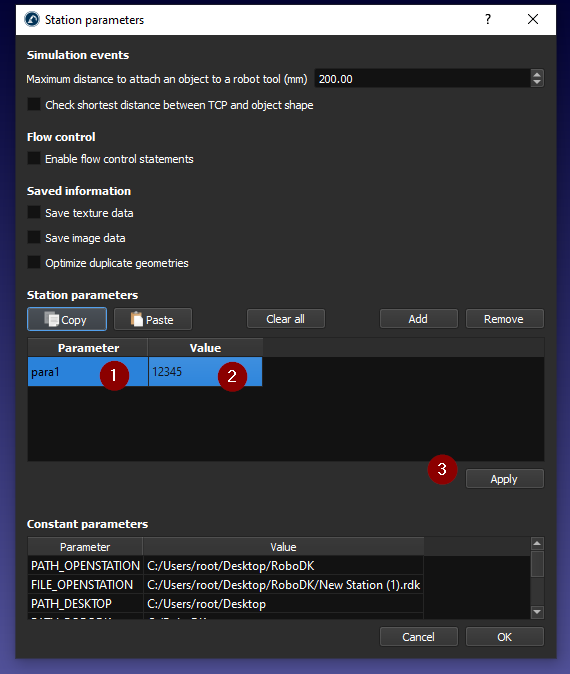
Você também pode obter seu próprio parâmetro de estação.
Tempo
O nó Hora é um nó que permite a você obter a hora atual da Estação RoboDK.
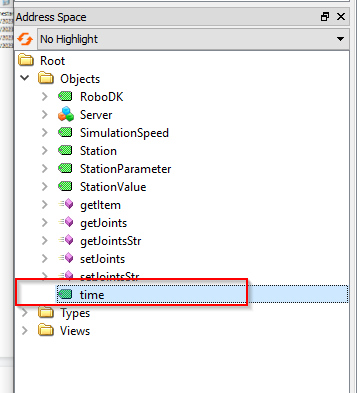
É retornado um valor com o formato DataHora.

E esse nó é atualizado continuamente.

Métodos
O Servidor RoboDK OPC UA também é fornecido com alguns métodos para permitir que o usuário acesse os dados da estação RoboDK dinamicamente.
Podemos simplesmente clicar com o botão direito do mouse no Método > Chamada para executar o método.
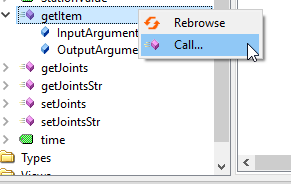
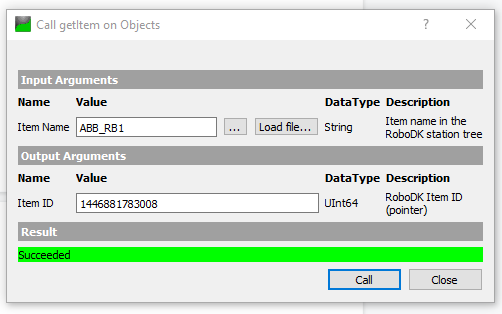
ObterItem
ObterItem é um método que permite que o usuário obtenha o ponteiro do seu Item.
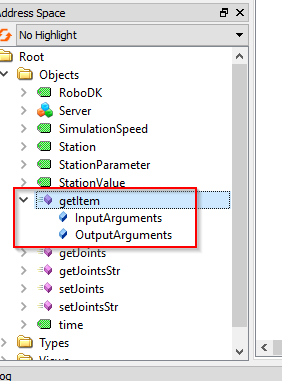
Para os ArgumentosDeEntrada, o Nome do Dispositivo é necessário, você pode imaginar que o Nome do Dispositivo é o nome da estação, o nome do robô, etc. E Item ID é o ArgumentosDeSaida que retorna o ponteiro desse dispositivo.
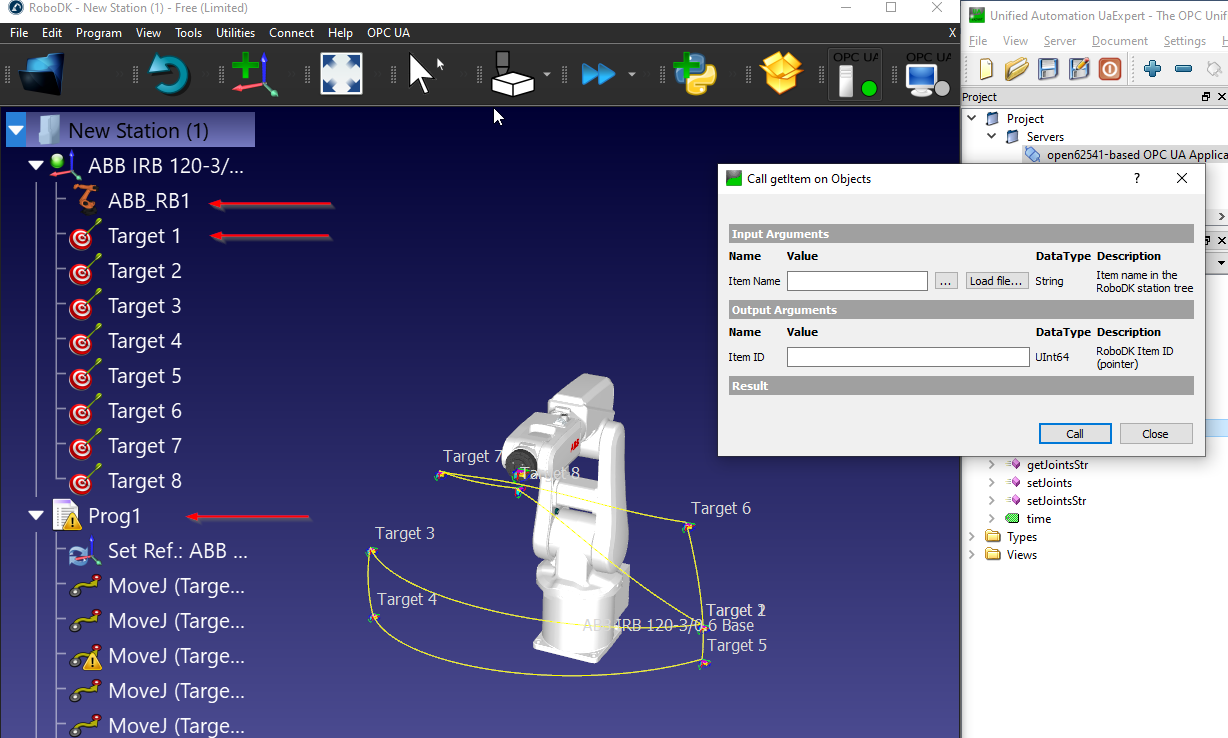
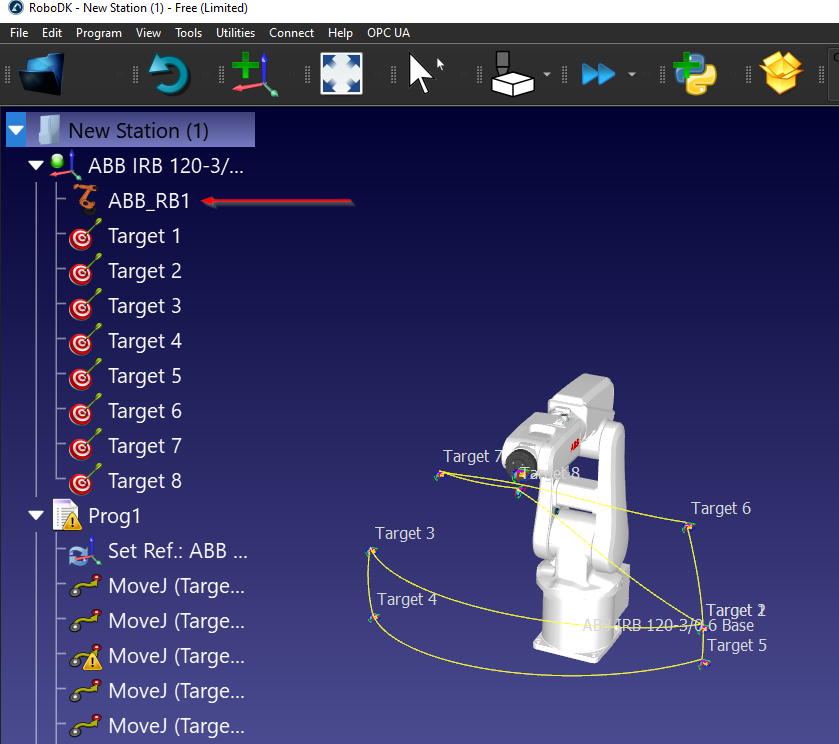
Neste exemplo, recebi o ID do item (ponteiro) do meu robô ABB denominado "ABB_RB1".
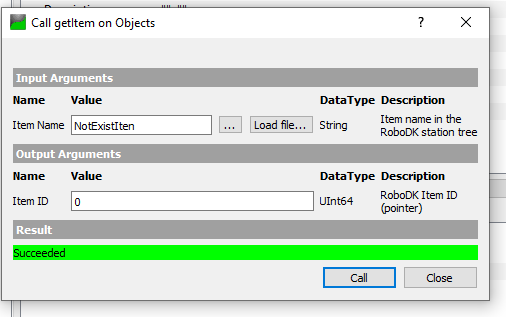
0 é retornado se o Item Name for inválido ou não existir em sua estação.
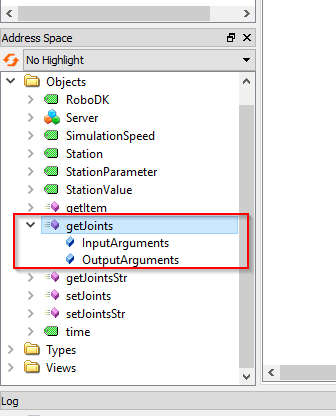
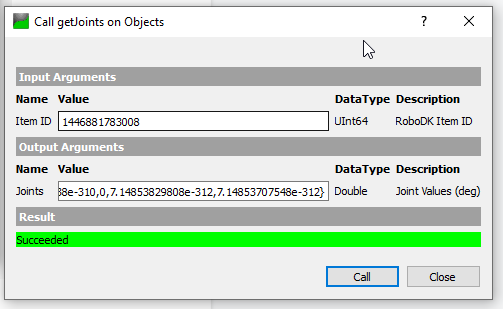
ObterEixos
ObterEixos é um método que permite ao usuário obter o valor do ângulo dos eixos do robô na estação, com base na ID do item.
O ID do item é o valor do ponteiro do seu item e você pode obtê-lo no método ObterItem().
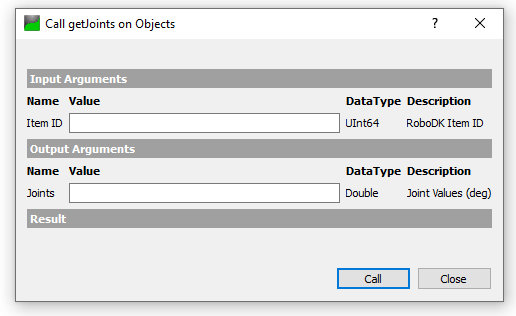
Obteremos a ID do item com esse nome de item "ABB_RB1", e um valor UInt64 será retornado.
O valor dos ângulos dos eixos é retornado ao passar o ID do item no método que obtivemos anteriormente.
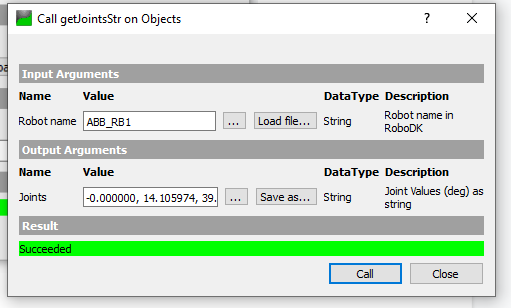
ObterStrEixos
ObterStrEixos é um método que permite ao usuário obter o valor dos ângulos dos eixos com base em um valor String.
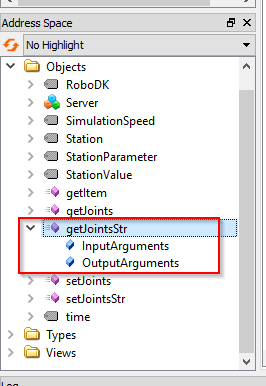
Podemos passar o nome do robô (String) nesse método.
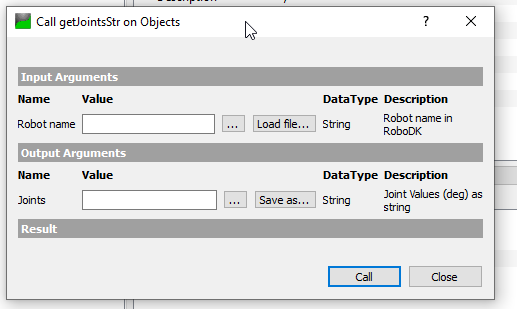
Em My Station, ABB_RB1 é o nome do meu robô.
Podemos simplesmente passar "ABB_RB1" no parâmetro do nome do robô e chamar o método - O valor conjunto no formato String é retornado.
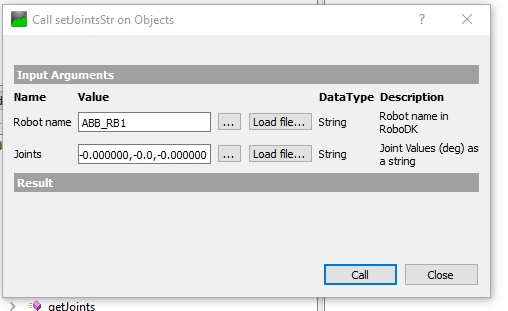
DefinirStrEixos
DefinirStrEixos é um método que permite ao usuário definir o valor dos ângulos dos eixos do Robô, com base em um valor String.
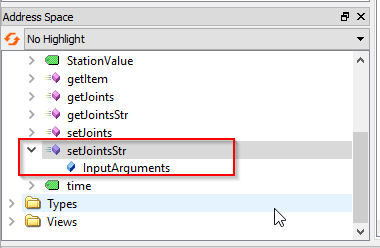
No nome do robô, ABB_RB1 é passado, e podemos simplesmente passar uma string com o valor do ângulo no parâmetro Joints.
Por exemplo:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000