Métodos
O Servidor RoboDK OPC UA também é fornecido com alguns métodos para permitir que o usuário acesse os dados da estação RoboDK dinamicamente.
Podemos simplesmente clicar com o botão direito do mouse no Método > Chamada para executar o método.
ObterItem
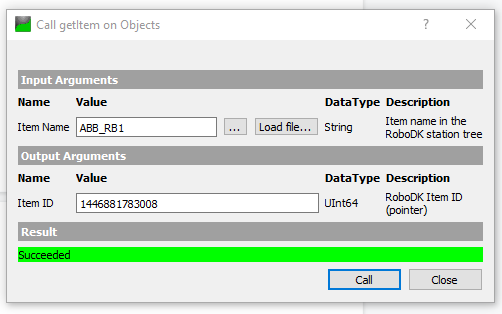
ObterItem é um método que permite que o usuário obtenha o ponteiro do seu Item.
Para os ArgumentosDeEntrada, o Nome do Dispositivo é necessário, você pode imaginar que o Nome do Dispositivo é o nome da estação, o nome do robô, etc. E Item ID é o ArgumentosDeSaida que retorna o ponteiro desse dispositivo.
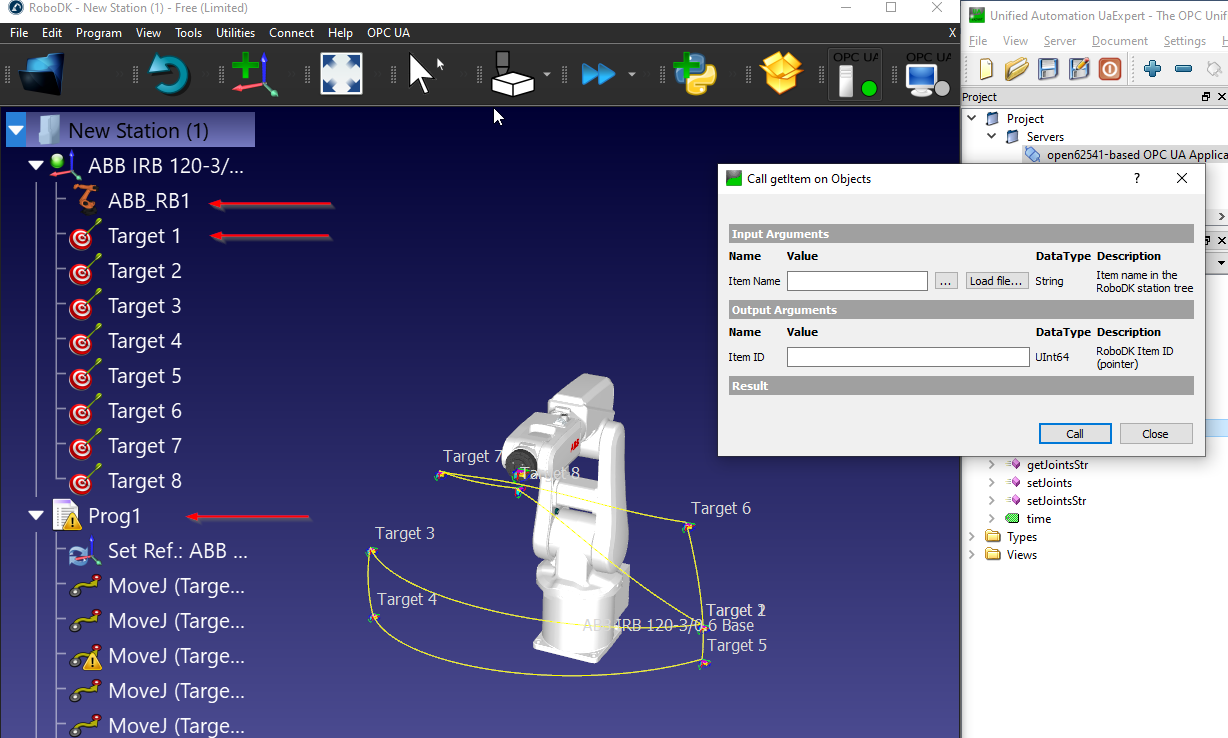
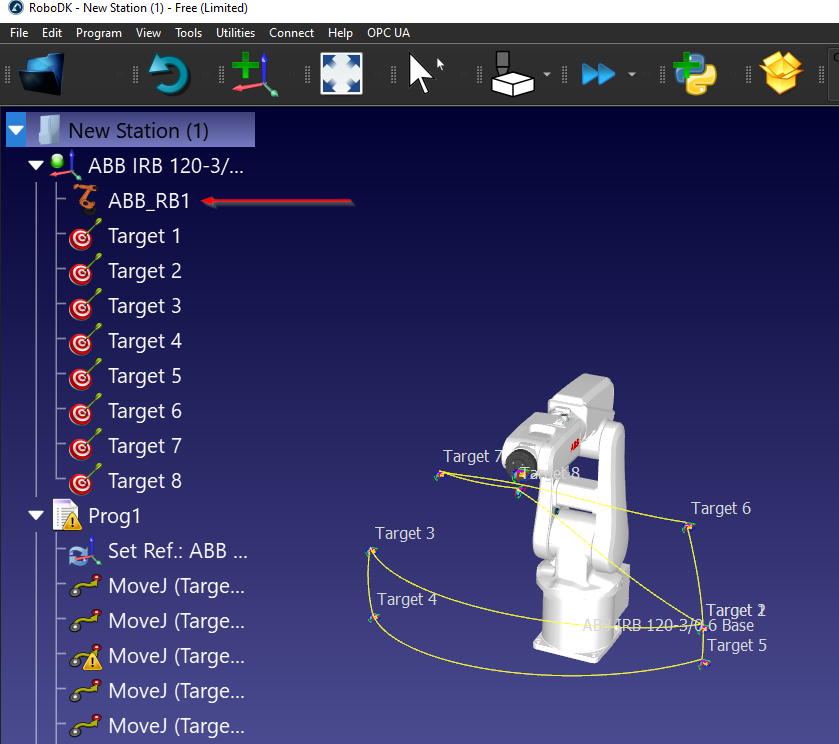
Neste exemplo, recebi o ID do item (ponteiro) do meu robô ABB denominado "ABB_RB1".
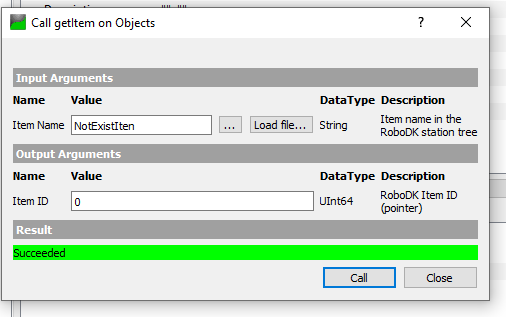
0 é retornado se o Item Name for inválido ou não existir em sua estação.
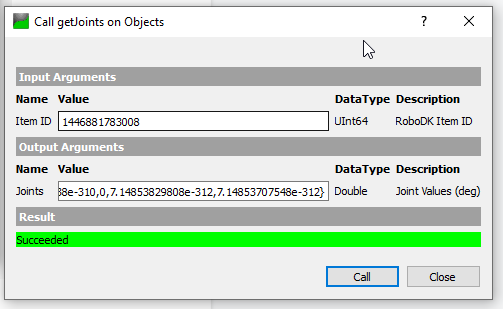
ObterEixos
ObterEixos é um método que permite ao usuário obter o valor do ângulo dos eixos do robô na estação, com base na ID do item.
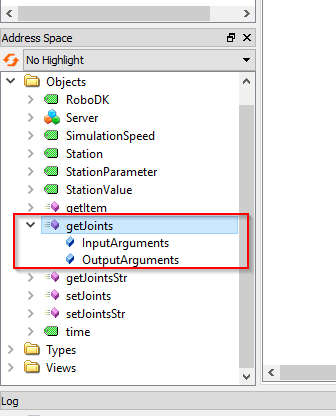
O ID do item é o valor do ponteiro do seu item e você pode obtê-lo no método ObterItem().
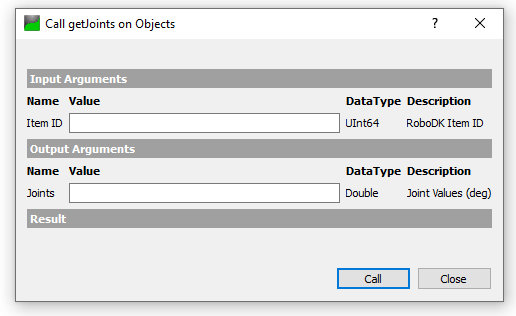
Obteremos a ID do item com esse nome de item "ABB_RB1", e um valor UInt64 será retornado.
O valor dos ângulos dos eixos é retornado ao passar o ID do item no método que obtivemos anteriormente.
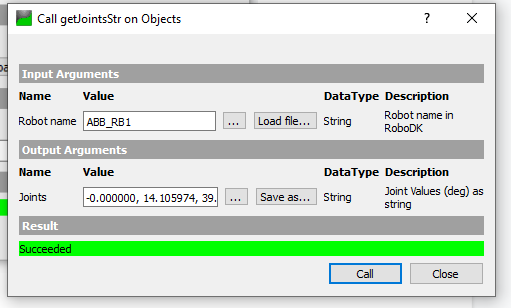
ObterStrEixos
ObterStrEixos é um método que permite ao usuário obter o valor dos ângulos dos eixos com base em um valor String.
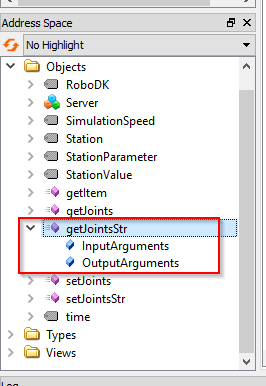
Podemos passar o nome do robô (String) nesse método.
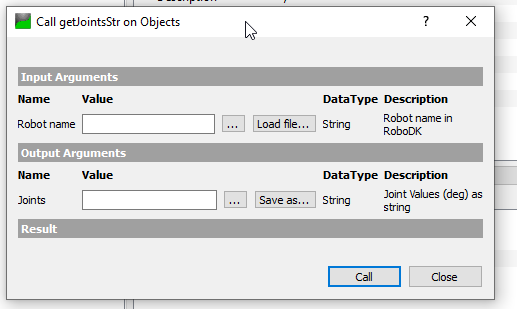
Em My Station, ABB_RB1 é o nome do meu robô.
Podemos simplesmente passar "ABB_RB1" no parâmetro do nome do robô e chamar o método - O valor conjunto no formato String é retornado.
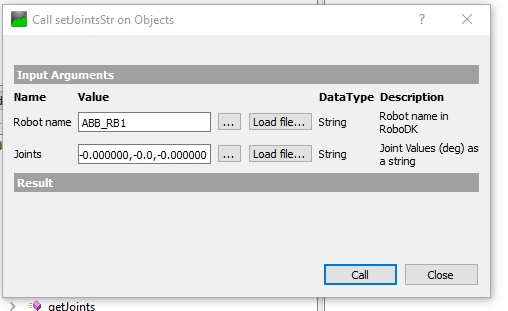
DefinirStrEixos
DefinirStrEixos é um método que permite ao usuário definir o valor dos ângulos dos eixos do Robô, com base em um valor String.
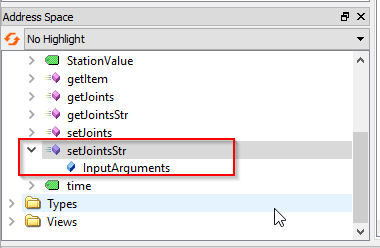
No nome do robô, ABB_RB1 é passado, e podemos simplesmente passar uma string com o valor do ângulo no parâmetro Joints.
Por exemplo:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000