Guia Drivers
As configurações dos drivers do robô permitem que você personalize o comportamento dos drivers do robô. Ao contrário dos pós-processadores (em que os programas são gerados off-line e, em seguida, carregados e executados no robô), os drivers do robô permitem que você movimente o robô diretamente do computador.
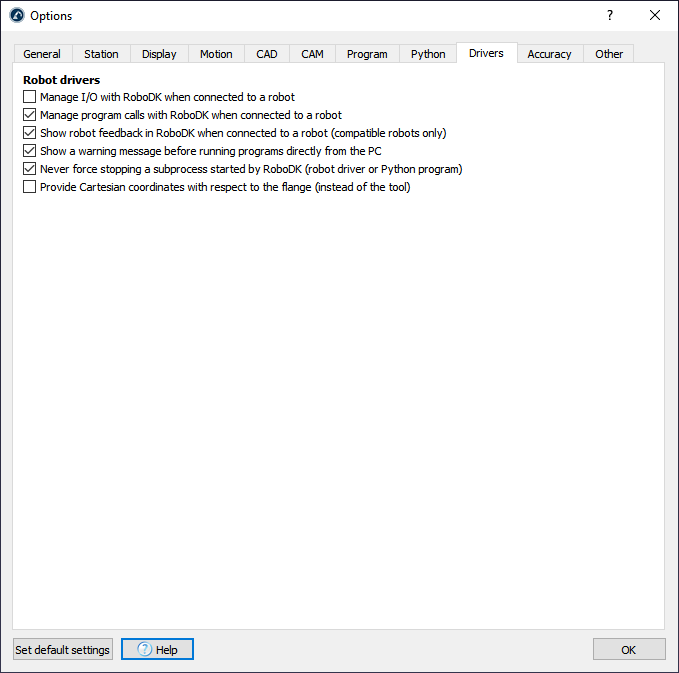
Selecione Gerenciar E/S com o RoboDK quando conectado a um robô para simular Entradas e Saídas como Parâmetros de Estação do RoboDK em vez de alterar o estado das Entradas/Saídas no robô real (isso é suportado por alguns drivers de robô).
A opção Mostrar feedback do robô no RoboDK, quando conectado a um robô, exibirá o movimento do robô em tempo real à medida que o robô se move (somente drivers de robô compatíveis).
Selecione Mostrar uma mensagem de aviso antes de executar programas diretamente do PC para exibir uma janela pop-up antes que o programa seja executado a partir do PC (ao usar a opção Iniciar Robô).
Desmarque a opção Nunca forçar a parada de um subprocesso iniciado pelo RoboDK se você tiver problemas com os drivers do robô. Isso garantirá que nenhum outro processo esteja sendo executado nos bastidores quando uma nova conexão com o robô for criada.