Guia Exibir
A guia Exibir permite que você personalize as configurações relacionadas à aparência da visualização 3D.
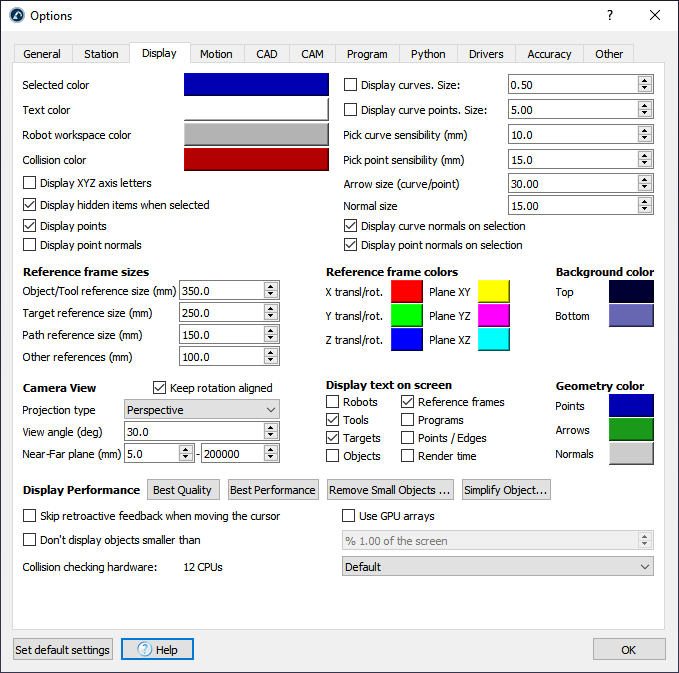
Selecione o botão colorido ao lado de Cor selecionada, Cor do texto, Área de trabalho ou Cor da colisão para alterar as cores padrão usadas na visualização 3D.
Selecione Exibir letras dos eixos XYZ para exibir os frames de referência com as letras X, Y e Z correspondentes. Por padrão, elas não são exibidas e são usadas as cores vermelha (X), verde (Y) e azul (Z), respectivamente.
Aumente a sensibilidade de selecionar curva/ponto para facilitar a seleção de curvas e pontos, respectivamente. Como alternativa, se as curvas ou os pontos estiverem muito próximos uns dos outros e não for fácil selecioná-los, é melhor reduzir esses valores.
O tamanho da seta (curva/ponto) é o tamanho das setas verdes exibidas em projetos de seguimento de curva ou ponto (disponível no menu Utilities).
O tamanho da referência Objeto/Ponto/Trajetória/Outro definirá o tamanho dos quadros na tela para itens específicos. Recomenda-se usar as teclas + e - para aumentar ou diminuir os tamanhos proporcionalmente.
As cores do frame de referência podem ser atualizadas manualmente, assim como as cores de fundo do gradiente (as cores do plano são exibidas ao mover os frames de referência com o mouse).
A visualização da câmera é definida como Perspectiva por padrão. É possível alterá-la para Orthográfica e atualizar algumas configurações da câmera, como o ângulo de visão e os planos Próximo/Distante.
Desmarque a opção Manter rotação alinhada para girar livremente em qualquer direção.
Por padrão, as configurações de exibição são definidas para obter os resultados de Melhor Qualidade. Defina a Performance de Exibição como Melhor Performance se o RoboDK ficar lento porque há muitos objetos sendo exibidos. Isso forçará o uso do GPU e não exibirá objetos pequenos na tela.
Também é possível exibir o RoboDK em uma tela 3D (use a visualização 3D para Realidade Virtual). A distância da câmera estéreo definirá a sensação de proximidade ou distância dos objetos.