Guia Movimento
A guia Movimento permite que você personalize o comportamento das simulações do robô e as tolerâncias usadas pelo RoboDK para exibir ou evitar singularidades e colisões do robô.
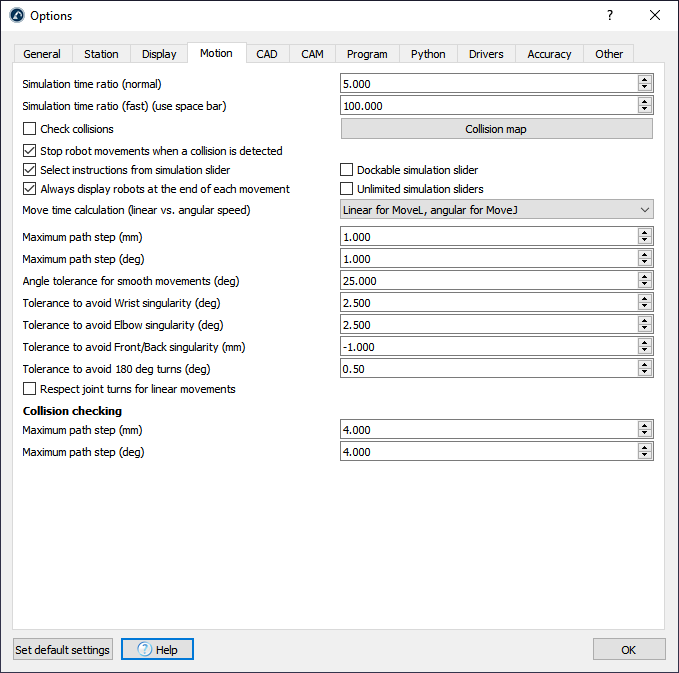
A taxa de tempo de simulação define a rapidez com que a simulação ocorre em relação ao tempo real. Uma taxa de simulação padrão de 5 significa que 1 segundo gasto no simulador equivale a 5 segundos em tempo real em execução no robô. Mais informações estão disponíveis na seção Proporção de simulação.



O cálculo do tempo de movimento define como o RoboDK calcula o tempo de ciclo e como os robôs usam as velocidades/acelerações lineares/angulares para simulação e cronometragem. Mais informações estão disponíveis na seção Tempo de ciclo.
Se a taxa de simulação for muito rápida, o computador talvez não consiga exibir o robô no final de cada movimento para manter uma simulação rápida. Para evitar esse efeito, marque a opção Sempre exibir robôs no final de cada movimento.
O passo máximo do caminho (mm/deg) define como o RoboDK discretiza qualquer movimento linear e articular, respectivamente, para fins de simulação.
A Tolerância para evitar a singularidade do pulso (deg) é o ângulo limite para evitar a singularidade do eixo 5 (deg), de modo que ele fique longe de 0 deg (ou quando os eixos 4 e 6 são paralelos). Essa configuração se aplica à maioria dos braços de robôs de 6 eixos, incluindo robôs colaborativos. Se uma singularidade for detectada em um programa de robô, o programa deverá ser alterado para garantir que não haja singularidades. Diminuir essas tolerâncias permitirá que você seja mais permissivo com o RoboDK, mas poderá receber avisos de singularidade ou erros com o controlador do robô real.
Uma configuração semelhante é aplicável para evitar a singularidade do cotovelo (em graus) e a singularidade frontal/traseira (em mm).