Guia Programa
A guia Programa permite que você personalize as configurações relacionadas aos programas do robô e como os arquivos de programa são gerados.
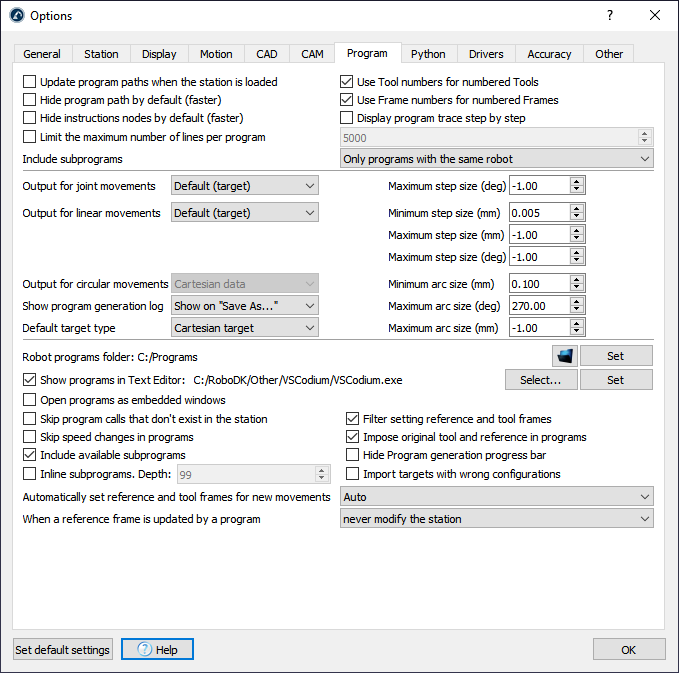
Verifique Atualizar trajetórias do programa quando a estação for carregada para recalcular os programas do robô. Essa operação exibirá os problemas do programa e mostrará os programas que apresentam problemas com um sinal de aviso
Ao marcar a opção Ocultar caminho do programa por padrão, as trajetórias do programa não serão exibidos quando novos programas forem gerados. Clique com o botão direito do mouse em um programa e marque/desmarque Exibir trajetória, respectivamente, para mostrar/ocultar o caminho amarelo do TCP do robô.
Usar números de ferramenta/frames de ferramentas/frames numerados usará os números de registro correspondentes de uma ferramenta/frame de referência em vez de atualizar as posições da ferramenta e do frame de referência no controlador do robô. Isso está disponível para controladores de robôs que usam principalmente registros numerados em vez de variáveis. Esse comportamento também pode ser personalizado com o uso de pós-processadores.
É possível forçar uma saída de ponto específica para movimentos joint/lineares na geração do programa, impondo dados angulares ou cartesianos. Por padrão, o RoboDK usará as configurações de ponto (coordenadas angulares para pontos angulares e coordenadas cartesianas para pontos cartesianos).
Por padrão, o RoboDK criará novos pontos como pontos cartesianos, o que significa que, se um frame de referência for movido, a posição do robô para alcançar esse ponto será diferente. É possível selecionar pontos Joint para impor pontos absolutos que não mudam dependendo das mudanças de referência/ferramenta.
Selecione Ignorar chamadas de programas que não existem na estação para ignorar a geração de programas.
Quando um frame de referência é usado em um programa (usando a instrução Definir Frame de Referência) e essa referência é movida posteriormente, o movimento do robô é alterado. Por padrão, a instrução definir frame de referência colocará a referência do robô no local original sem alterar a referência da estação.
A opção Limitar o número máximo de linhas por programa pode ser marcada para especificar quantas linhas um programa terá, no máximo. Isso dividirá um programa longo em subprogramas e gerará um programa principal que executará esses programas menores sequencialmente. Os controladores do robô têm capacidade limitada e podem executar programas de um determinado tamanho. Com exceção de controladores de robôs específicos/antigos, a maioria dos controladores pode suportar 5.000 linhas em um programa.
Por fim, configurações específicas estão disponíveis para marcas específicas de robôs ao usar pós-processadores incorporados. Por outro lado, os pós-processadores personalizados permitem customizar ou impor determinado comportamento logo antes de o programa ser gerado.