Menu Opções
Este documento fornece uma visão geral do Menu Opções disponível no software RoboDK.
Selecione Ferramentas ➔
A maioria das configurações é armazenada na conta de usuário do computador. Alterar a conta de usuário não manterá as alterações aplicadas a essas configurações. Como exceção, as configurações e os parâmetros da estação (disponíveis na guia Geral) são armazenados com cada estação (arquivo RDK).
Guia Geral
A guia principal contém opções gerais, como a personalização do tema, as configurações de navegação do mouse 3D, a aparência da árvore, a ativação de backups automáticos ou a personalização das casas decimais exibidas nos formulários.
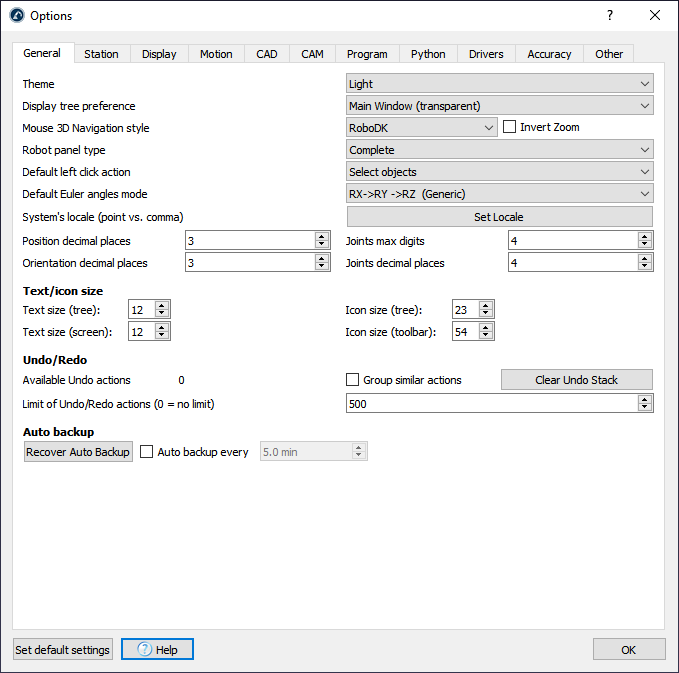
O tema permitirá que você exiba o RoboDK no modo escuro, no modo claro ou em outros modos de cores usados por padrão pelo seu PC.
A configuração padrão da preferência Exibir árvore exibirá a árvore da estação dentro da janela principal. Altere-a para Janela lateral para exibir a árvore em uma janela separada.
Com o estilo Navegação Mouse 3, é possível especificar o tipo preferido de navegação 3D com um mouse e emular um software específico, como os softwares Rhinoceros, Catia, TopSolid ou Vero.
O tipo de painel do robô é definido como Completo por padrão. Isso exibirá um painel completo do robô. Defina essa opção como Normal ou Basic para reduzir o número de opções disponíveis no painel do robô.
A ação padrão do clique esquerdo é definida para selecionar objetos por padrão. É possível alterá-la para outras configurações de navegação 3D, por exemplo, para girar por padrão.
O modo Ângulos de Euler padrão permite selecionar a ordem em que as rotações do quadro são feitas por padrão. Um frame de referência genérico contém informações de posição e orientação. Os frames de referência são poses e podem ser representados usando a posição XYZ e as rotações em torno de X, Y e Z. A ordem de rotação é muito importante. O RoboDK pré-selecionará o formato/ordem corretos, dependendo do robô que estiver sendo usado. Consulte a seção de frames de referência para obter mais informações.
O Locale do sistema permite definir o locale para um idioma e país específicos. Isso exibirá os números no formato correto e usará o caractere de ponto decimal apropriado.
As casas decimais de Posição/Orientação e Eixos permitem que você especifique quantos dígitos/decimais são exibidos antes do ponto decimal e depois do ponto decimal, respectivamente, para pontos cartesianos do robô e pontos de articulação, respectivamente.
A seção Tamanho do texto/ícone permite alterar o tamanho do texto e dos ícones na árvore e na barra de ferramentas.
Você pode limpar a pilha de desfazer para limpar a memória RAM. Também é possível limitar as ações de desfazer/refazer que serão mantidas na memória. Se o RoboDK usar muita memória RAM ou ficar mais lento, pode ser porque há muitas ações de desfazer sendo armazenadas. Por padrão, ações semelhantes não são agrupadas, por exemplo, se um frame de referência for movido, cada pequeno passo será registrado. Marque Agrupar ações semelhantes para evitar esse comportamento.
Guia Estação
Os parâmetros da estação são os únicos parâmetros no Menu Opções que são spontos com o projeto do RoboDK (arquivo RDK), em vez das configurações da conta do usuário.
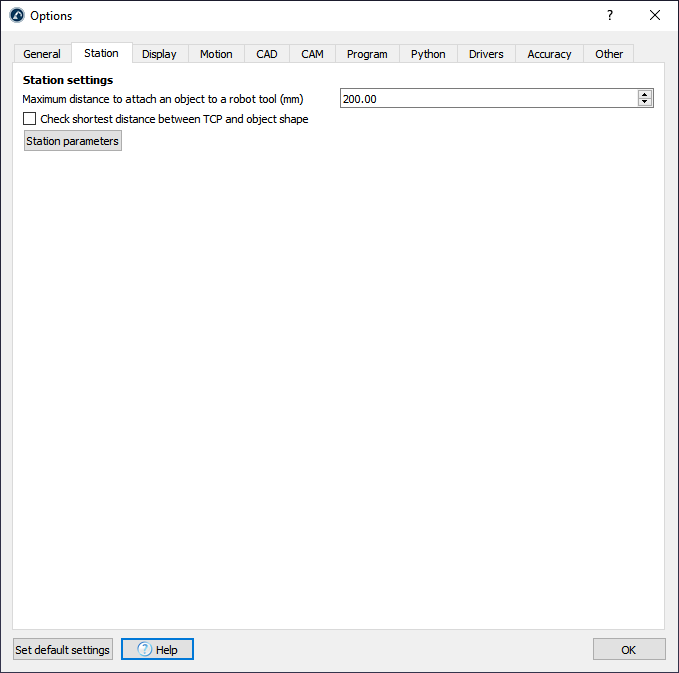
A distância máxima para anexar um objeto a uma ferramenta de robô é usada por um evento de simulação. Os eventos de simulação podem anexar objetos a ferramentas e simular eventos específicos. Esses eventos não têm impacto no código gerado, pois são usados apenas para fins de simulação.
Os parâmetros da estação são parâmetros de estado que são spontos com o arquivo RDK e podem ser modificados manualmente ou por meio da API. Os parâmetros da estação permitem simular entradas e saídas digitais e comunicar a simulação com outros sistemas por meio da API, como um PLC.
Guia Exibir
A guia Exibir permite que você personalize as configurações relacionadas à aparência da visualização 3D.
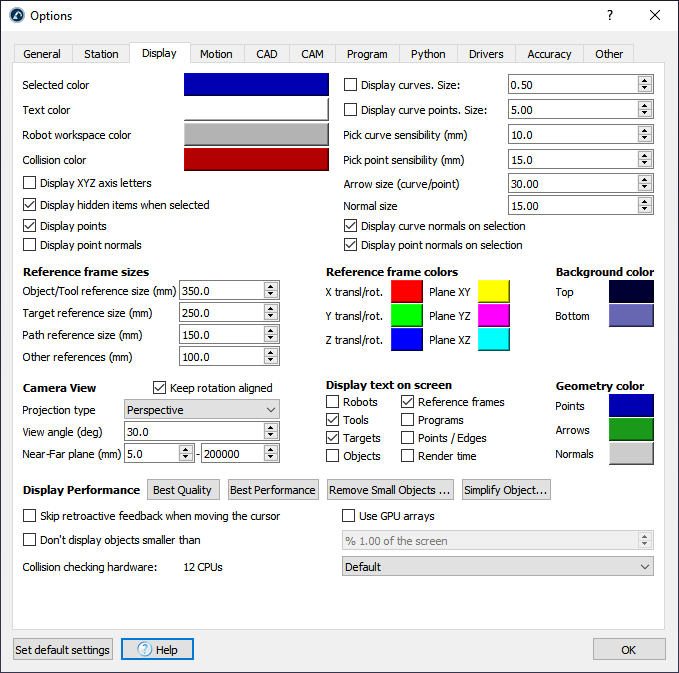
Selecione o botão colorido ao lado de Cor selecionada, Cor do texto, Área de trabalho ou Cor da colisão para alterar as cores padrão usadas na visualização 3D.
Selecione Exibir letras dos eixos XYZ para exibir os frames de referência com as letras X, Y e Z correspondentes. Por padrão, elas não são exibidas e são usadas as cores vermelha (X), verde (Y) e azul (Z), respectivamente.
Aumente a sensibilidade de selecionar curva/ponto para facilitar a seleção de curvas e pontos, respectivamente. Como alternativa, se as curvas ou os pontos estiverem muito próximos uns dos outros e não for fácil selecioná-los, é melhor reduzir esses valores.
O tamanho da seta (curva/ponto) é o tamanho das setas verdes exibidas em projetos de seguimento de curva ou ponto (disponível no menu Utilities).
O tamanho da referência Objeto/Ponto/Trajetória/Outro definirá o tamanho dos quadros na tela para itens específicos. Recomenda-se usar as teclas + e - para aumentar ou diminuir os tamanhos proporcionalmente.
As cores do frame de referência podem ser atualizadas manualmente, assim como as cores de fundo do gradiente (as cores do plano são exibidas ao mover os frames de referência com o mouse).
A visualização da câmera é definida como Perspectiva por padrão. É possível alterá-la para Orthográfica e atualizar algumas configurações da câmera, como o ângulo de visão e os planos Próximo/Distante.
Desmarque a opção Manter rotação alinhada para girar livremente em qualquer direção.
Por padrão, as configurações de exibição são definidas para obter os resultados de Melhor Qualidade. Defina a Performance de Exibição como Melhor Performance se o RoboDK ficar lento porque há muitos objetos sendo exibidos. Isso forçará o uso do GPU e não exibirá objetos pequenos na tela.
Também é possível exibir o RoboDK em uma tela 3D (use a visualização 3D para Realidade Virtual). A distância da câmera estéreo definirá a sensação de proximidade ou distância dos objetos.
Guia Movimento
A guia Movimento permite que você personalize o comportamento das simulações do robô e as tolerâncias usadas pelo RoboDK para exibir ou evitar singularidades e colisões do robô.
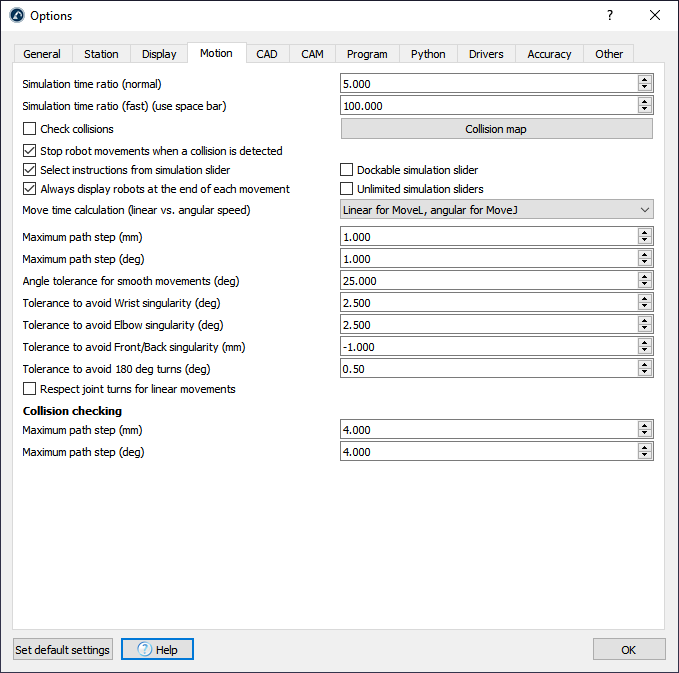
A taxa de tempo de simulação define a rapidez com que a simulação ocorre em relação ao tempo real. Uma taxa de simulação padrão de 5 significa que 1 segundo gasto no simulador equivale a 5 segundos em tempo real em execução no robô. Mais informações estão disponíveis na seção Proporção de simulação.



O cálculo do tempo de movimento define como o RoboDK calcula o tempo de ciclo e como os robôs usam as velocidades/acelerações lineares/angulares para simulação e cronometragem. Mais informações estão disponíveis na seção Tempo de ciclo.
Se a taxa de simulação for muito rápida, o computador talvez não consiga exibir o robô no final de cada movimento para manter uma simulação rápida. Para evitar esse efeito, marque a opção Sempre exibir robôs no final de cada movimento.
O passo máximo do caminho (mm/deg) define como o RoboDK discretiza qualquer movimento linear e articular, respectivamente, para fins de simulação.
A Tolerância para evitar a singularidade do pulso (deg) é o ângulo limite para evitar a singularidade do eixo 5 (deg), de modo que ele fique longe de 0 deg (ou quando os eixos 4 e 6 são paralelos). Essa configuração se aplica à maioria dos braços de robôs de 6 eixos, incluindo robôs colaborativos. Se uma singularidade for detectada em um programa de robô, o programa deverá ser alterado para garantir que não haja singularidades. Diminuir essas tolerâncias permitirá que você seja mais permissivo com o RoboDK, mas poderá receber avisos de singularidade ou erros com o controlador do robô real.
Uma configuração semelhante é aplicável para evitar a singularidade do cotovelo (em graus) e a singularidade frontal/traseira (em mm).
Guia CAD
A seção CAD (Computer-aided Design) permite especificar as configurações relacionadas à importação de arquivos paramétricos (STEP/STP e IGES/IGS) e à exibição desses arquivos no ambiente 3D.
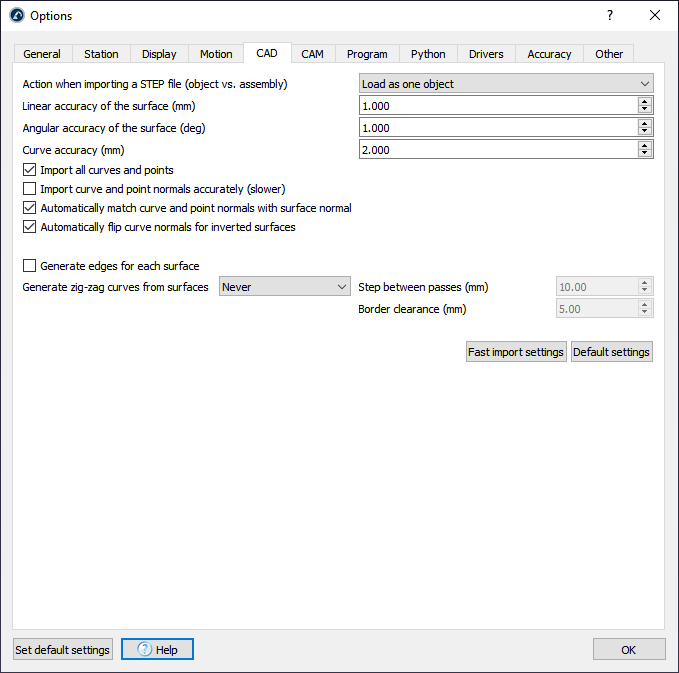
Aumente a precisão Linear/Angular da superfície para importar arquivos mais rapidamente. Diminua esses valores para melhorar a precisão dos objetos importados.
Se estivermos usando um projeto de seguimento de curva ou ponto (no menu Utilitários) e estivermos usando as configurações de importação rápida, não será possível selecionar as curvas incluídas nesses tipos de arquivos paramétricos. Nesse caso, marque a opção Importar todas as curvas e pontos.
A precisão da curva define a precisão com que as curvas são importadas dos arquivos paramétricos. Por padrão, o RoboDK importará todas as curvas incluídas nesses arquivos. Além disso, o RoboDK extrairá as bordas das curvas nos arquivos 3D.
É possível gerar automaticamente uma curva em zigue-zague a partir de cada superfície e especificar a etapa entre as passagens e a distância que a curva é mantida da borda. Isso pode ser útil para aplicações de pintura ou inspeção.
Guia CAM
A seção CAM (Computer-aided Manufacturing) mostra todas as configurações relacionadas às operações de manufatura com robô, como a usinagem com robô ou a impressão 3D, e como importar as trajetórias de ferramenta do robô criados usando o software CAM.
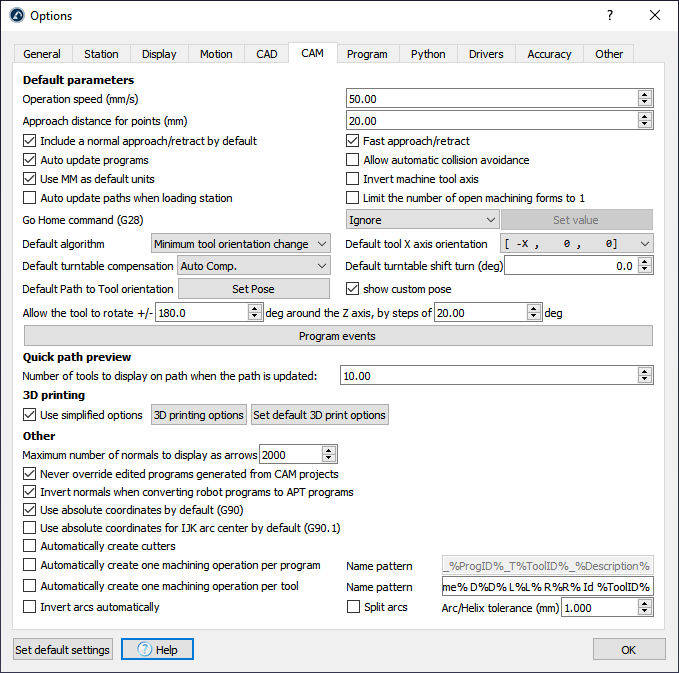
A velocidade de operação é a velocidade padrão usada em operações para projetos de curva e seguimento de ponto. O projeto de curva/seguimento de ponto está disponível no menu Utilitários.
A distância de aproximação para pontos é a distância padrão usada para se aproximar de pontos em um projeto de seguimento de pontos. Essa opção é útil para aplicações como perfuração ou soldagem por pontos.
Incluir uma aproximação/retração normal por padrão incluirá uma aproximação normal de 100 mm ao percurso da ferramenta.
É possível ignorar o comando Go Home (código ISO G28) definido por alguns programas de usinagem de robôs ou defini-lo com um valor específico (coordenadas XYZ).
Os eventos do programa definem quais ações são tomadas para eventos específicos de código G, como a configuração de saídas digitais, o gerenciamento de cabeçotes de extrusão ou o acionamento de programas específicos em diferentes estágios da operação de fabricação.
Outras opções estão disponíveis para definir as configurações padrão quando um novo projeto de usinagem com robôs é iniciado. Essas são as mesmas configurações disponíveis no menu de usinagem com robô.
A seção Visualização rápida do caminho permite definir quantas ferramentas são exibidas como visualização ao mover o frame de referência ou o frame de ferramentas de uma operação de fabricação.
É possível abrir as opções de impressão 3D do Slicer na seção de impressão 3D. O Slicer divide um objeto em um caminho de ferramenta de máquina e, em seguida, o caminho de ferramenta pode ser facilmente convertido em um programa de robô com o RoboDK.
Os programas de robô gerados a partir de programas CAM podem ser modificados após terem sido gerados. Entretanto, a atualização das configurações do menu de usinagem do robô substituirá qualquer programa gerado anteriormente. Marque a opção Nunca substituir programas editados gerados a partir de projetos CAM para evitar a perda de alterações.
O comprimento das normais do caminho exibido (mm) é o comprimento do vetor branco que representa a normal da trajetória da ferramenta CAM. A trajetória da ferramenta CAM é exibida em verde.
Guia Programa
A guia Programa permite que você personalize as configurações relacionadas aos programas do robô e como os arquivos de programa são gerados.
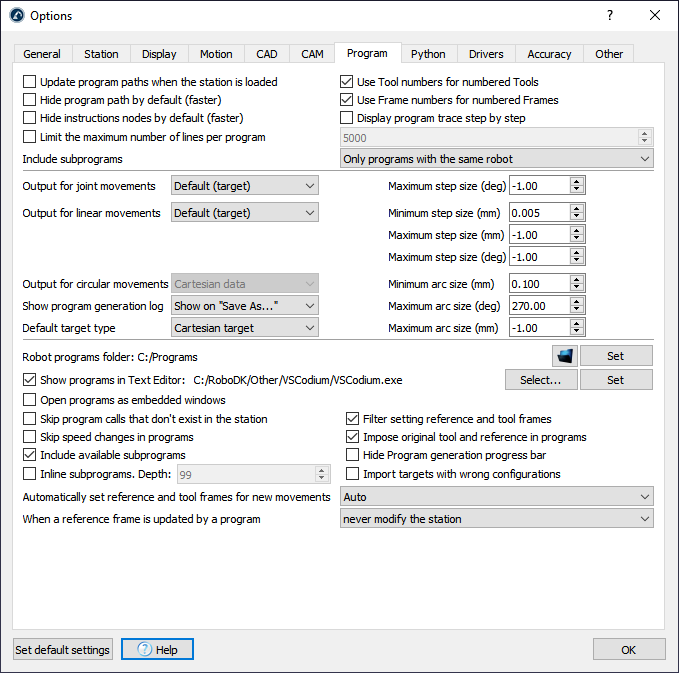
Verifique Atualizar trajetórias do programa quando a estação for carregada para recalcular os programas do robô. Essa operação exibirá os problemas do programa e mostrará os programas que apresentam problemas com um sinal de aviso
Ao marcar a opção Ocultar caminho do programa por padrão, as trajetórias do programa não serão exibidos quando novos programas forem gerados. Clique com o botão direito do mouse em um programa e marque/desmarque Exibir trajetória, respectivamente, para mostrar/ocultar o caminho amarelo do TCP do robô.
Usar números de ferramenta/frames de ferramentas/frames numerados usará os números de registro correspondentes de uma ferramenta/frame de referência em vez de atualizar as posições da ferramenta e do frame de referência no controlador do robô. Isso está disponível para controladores de robôs que usam principalmente registros numerados em vez de variáveis. Esse comportamento também pode ser personalizado com o uso de pós-processadores.
É possível forçar uma saída de ponto específica para movimentos joint/lineares na geração do programa, impondo dados angulares ou cartesianos. Por padrão, o RoboDK usará as configurações de ponto (coordenadas angulares para pontos angulares e coordenadas cartesianas para pontos cartesianos).
Por padrão, o RoboDK criará novos pontos como pontos cartesianos, o que significa que, se um frame de referência for movido, a posição do robô para alcançar esse ponto será diferente. É possível selecionar pontos Joint para impor pontos absolutos que não mudam dependendo das mudanças de referência/ferramenta.
Selecione Ignorar chamadas de programas que não existem na estação para ignorar a geração de programas.
Quando um frame de referência é usado em um programa (usando a instrução Definir Frame de Referência) e essa referência é movida posteriormente, o movimento do robô é alterado. Por padrão, a instrução definir frame de referência colocará a referência do robô no local original sem alterar a referência da estação.
A opção Limitar o número máximo de linhas por programa pode ser marcada para especificar quantas linhas um programa terá, no máximo. Isso dividirá um programa longo em subprogramas e gerará um programa principal que executará esses programas menores sequencialmente. Os controladores do robô têm capacidade limitada e podem executar programas de um determinado tamanho. Com exceção de controladores de robôs específicos/antigos, a maioria dos controladores pode suportar 5.000 linhas em um programa.
Por fim, configurações específicas estão disponíveis para marcas específicas de robôs ao usar pós-processadores incorporados. Por outro lado, os pós-processadores personalizados permitem customizar ou impor determinado comportamento logo antes de o programa ser gerado.
Guia Python
A guia Python permite que você configure o caminho do interpretador Python e do editor Python usado pelo RoboDK. A maioria dos pós-processadores requer Python para permitir que você gere programas de robôs específicos da marca. Além disso, alguns exemplos que usam a API do RoboDK exigem a instalação do Python.
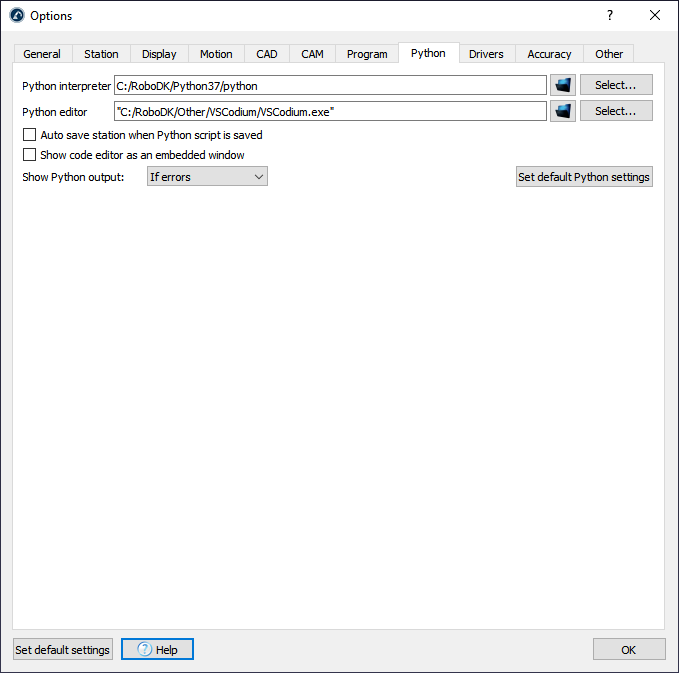
Selecione Selecionar... ao lado do caminho da pasta Python para exibir automaticamente os interpretadores Python disponíveis. O Python é necessário para usar a maioria dos pós-processadores de robôs e a API do RoboDK.
Você pode selecionar Auto salvar Estação quando um script Python é salvo para salvar o projeto RDK sempre que um script for salvo.
Também é recomendável usar o VSCode, o VSCodium ou o Notepad++ no Windows para visualizar ou modificar programas e pós-processadores de robôs.
Guia Drivers
As configurações dos drivers do robô permitem que você personalize o comportamento dos drivers do robô. Ao contrário dos pós-processadores (em que os programas são gerados off-line e, em seguida, carregados e executados no robô), os drivers do robô permitem que você movimente o robô diretamente do computador.
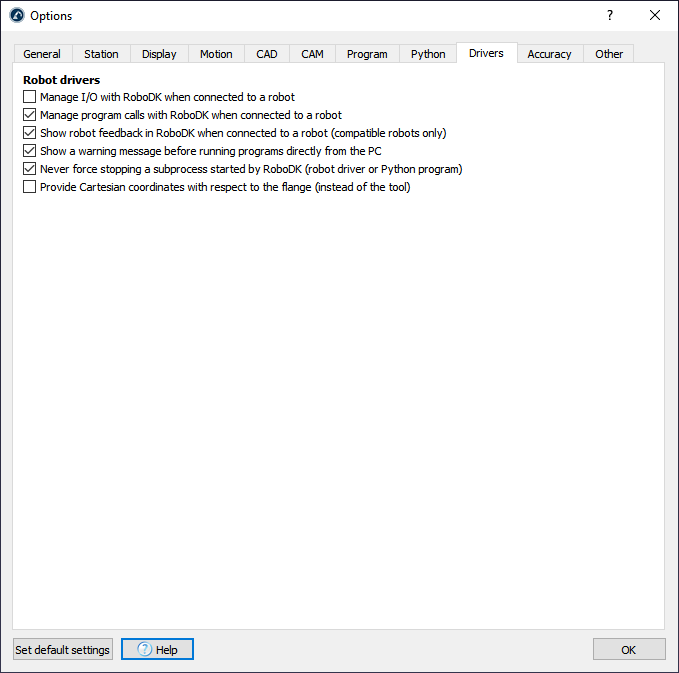
Selecione Gerenciar E/S com o RoboDK quando conectado a um robô para simular Entradas e Saídas como Parâmetros de Estação do RoboDK em vez de alterar o estado das Entradas/Saídas no robô real (isso é suportado por alguns drivers de robô).
A opção Mostrar feedback do robô no RoboDK, quando conectado a um robô, exibirá o movimento do robô em tempo real à medida que o robô se move (somente drivers de robô compatíveis).
Selecione Mostrar uma mensagem de aviso antes de executar programas diretamente do PC para exibir uma janela pop-up antes que o programa seja executado a partir do PC (ao usar a opção Iniciar Robô).
Desmarque a opção Nunca forçar a parada de um subprocesso iniciado pelo RoboDK se você tiver problemas com os drivers do robô. Isso garantirá que nenhum outro processo esteja sendo executado nos bastidores quando uma nova conexão com o robô for criada.
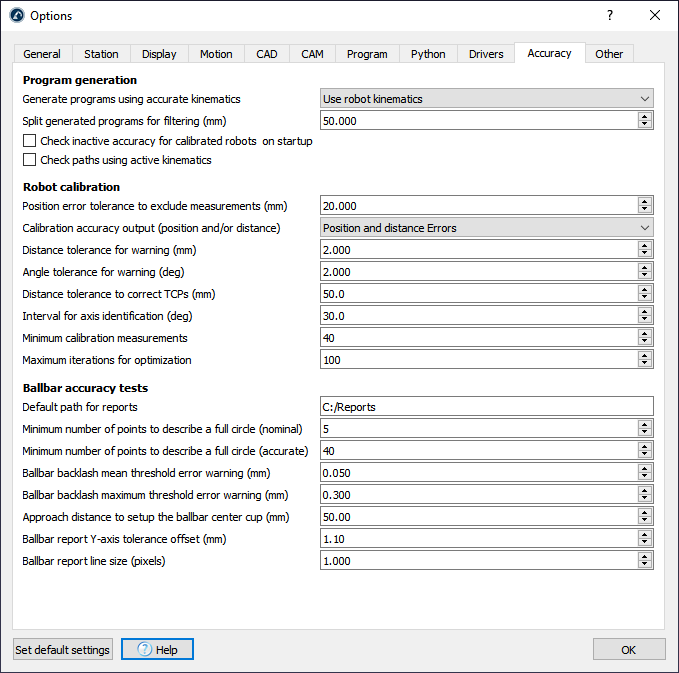
Guia Precisão
A guia Precisão mostra opções específicas relacionadas à calibração do robô e ao teste de desempenho do robô, como o teste de ballbar.
Guia Outros
A guia Other (Outros) permite personalizar as configurações relacionadas à API do RoboDK, ativar a visualização do servidor da Web, configurar um servidor proxy e personalizar o comportamento de um mouse 3D (como o 3D Connexion).
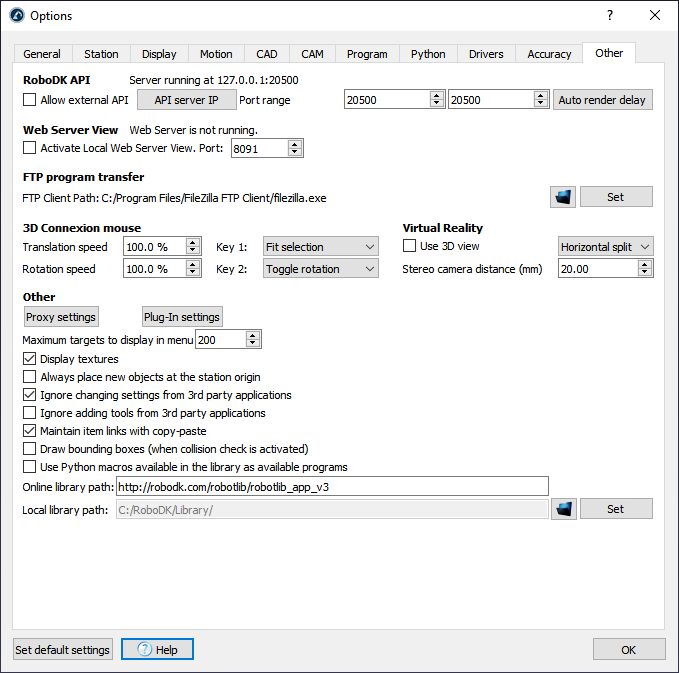
Recomenda-se instalar o FileZilla Client para transferir os programas do robô do computador diretamente para o robô se ambos estiverem conectados na mesma rede (a maioria dos controladores de robôs suporta transferência por FTP).
É possível permitir a comunicação externa da API do RoboDK marcando Permitir API externa e selecionando um IP e uma porta de servidor apropriados.
Selecione Ativar visualização de um Servidor Web local para converter seu computador em um visualizador de servidor da Web, onde você pode se conectar e ver suas simulações como uma simulação HTML 3D.
É possível usar um mouse 3D Connexion, como o SpaceNavigator, e alterar as velocidades padrão de translação e rotação usando o mouse 3D.
Selecione Configurações de proxy para usar um servidor proxy ao usar licenças de rede ou ao se conectar à biblioteca on-line.