Palletizing
O senhor pode realizar a paletização automatizada usando o plug-in de paletização. O plug-in de paletização o ajudará a criar um programa de paletização rapidamente usando uma interface visual e intuitiva.
Este exemplo o guiará pelas etapas necessárias para passar de uma estação de paletização básica para uma simulação e, finalmente, para um programa de robô real que pode ser carregado e executado em um controlador de robô.
O senhor deve carregar o plug-in de paletização no RoboDK para ativar os recursos de paletização.
Siga estas etapas para ativar o plug-in de paletização:
1.Selecione Tools➔ Plug-Ins.
2.Clique duas vezes no PluginPalletizing se ele não estiver ativado.
O senhor deverá ver a entrada Palletizing (Paletização) no menu e um novo ícone Palletizing (Paletização) na barra de ferramentas.
Para criar um projeto de paletização, primeiro o senhor precisa configurar adequadamente sua estação no RoboDK.
Siga estas etapas: para configurar adequadamente sua estação:
1. O senhor deve carregar um robô, uma ferramenta (TCP), um quadro de referência para pegar a caixa (Pick_Frame) e um quadro de referência para construir o palete (Pallet).
2.Recomendamos também que o senhor importe a caixa que deseja empilhar e o palete sobre o qual deseja empilhar. Como alternativa, o senhor pode encontrar caixas de tamanho padrão na biblioteca do RoboDK.
3.O palete deve estar alinhado com os eixos X+ e Y+ da estrutura de empilhamento (Palete).

O assistente de paletização exige que o senhor forneça um subprograma para selecionar uma nova caixa e um programa para soltar a caixa. Recomendamos que o senhor crie esses programas primeiro.
Siga estas etapas para criar um programa de picking (Pick_Box) e um programa de drop (Drop_Box):
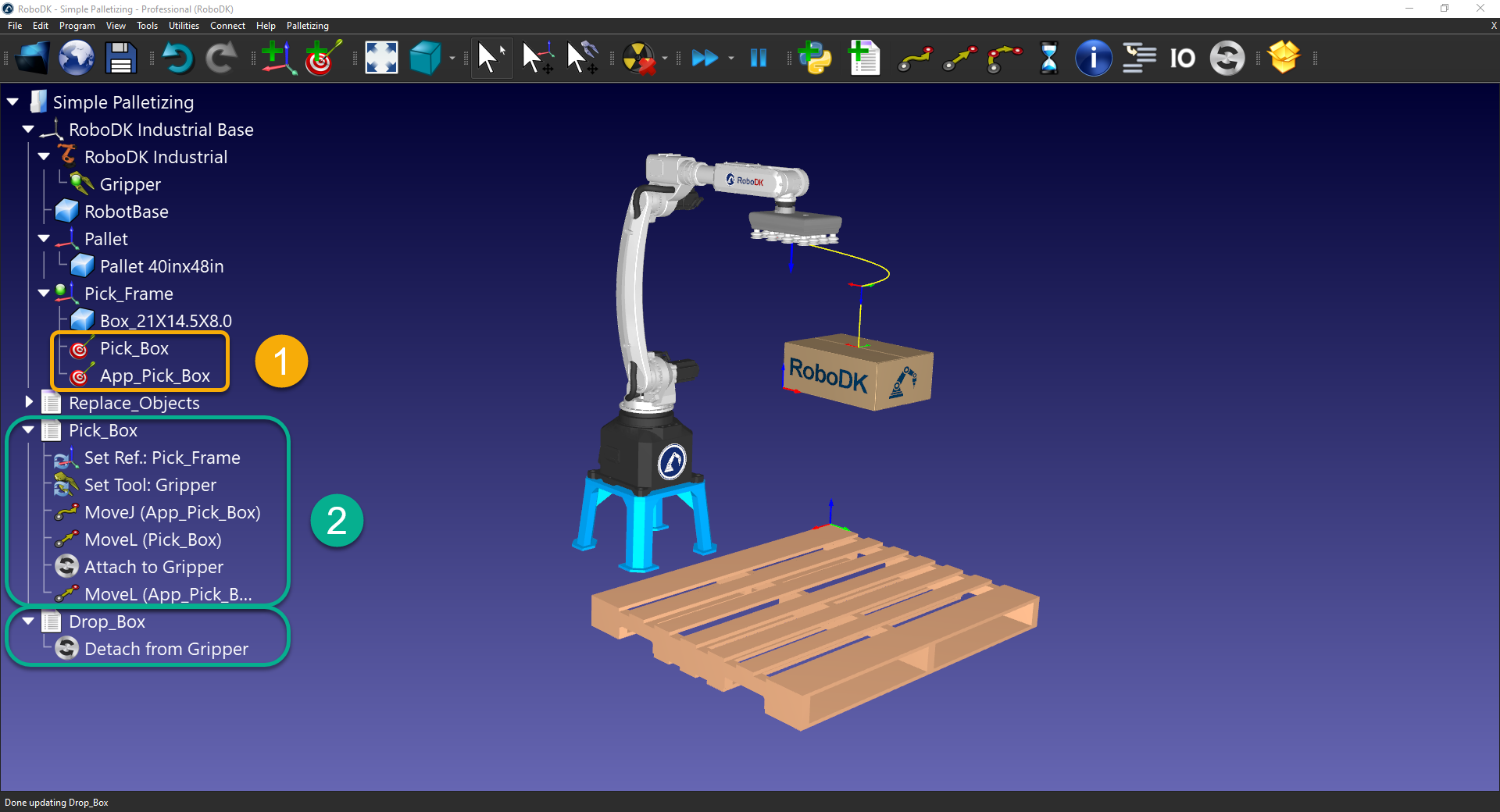
1. Crie um alvo de seleção onde o senhor selecionará a nova caixa de entrada. Recomendamos também que o senhor adicione um ponto de aproximação.
2. Crie um programa Pick_Box e Drop_Box.