Preparando sua estação
Para criar um projeto de paletização, primeiro você precisa configurar adequadamente sua estação no RoboDK.
Siga estas etapas para configurar adequadamente sua estação:
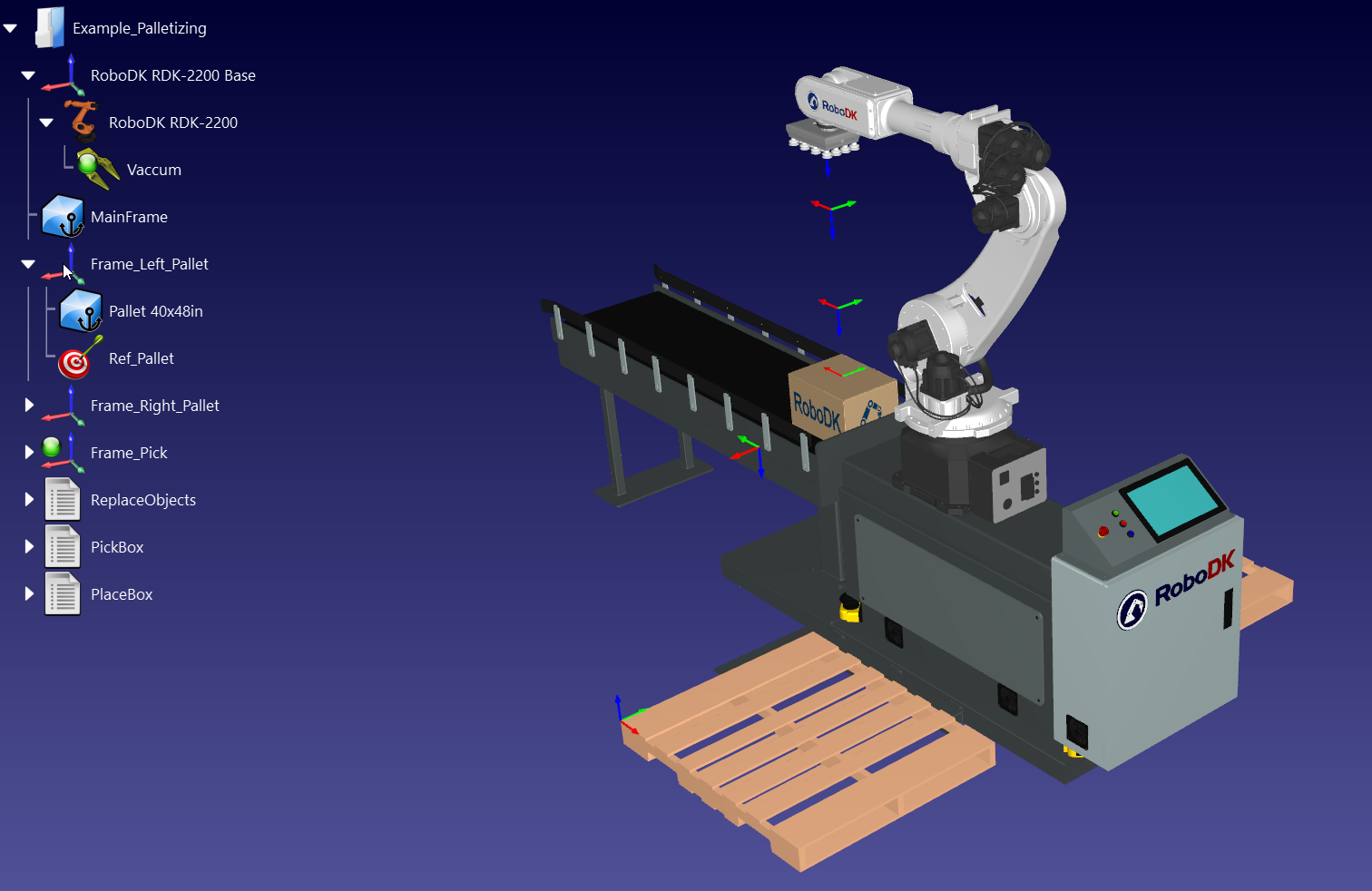
1.Você deve carregar um robô, uma ferramenta, uma caixa, um frame de referência onde marcará os pontos de pega da caixa (ex.: Frame_Pick), um palete e um frame de referência no canto do palete (ex.: Frame_Pallet). Você também pode carregar um transportador, se tiver um.
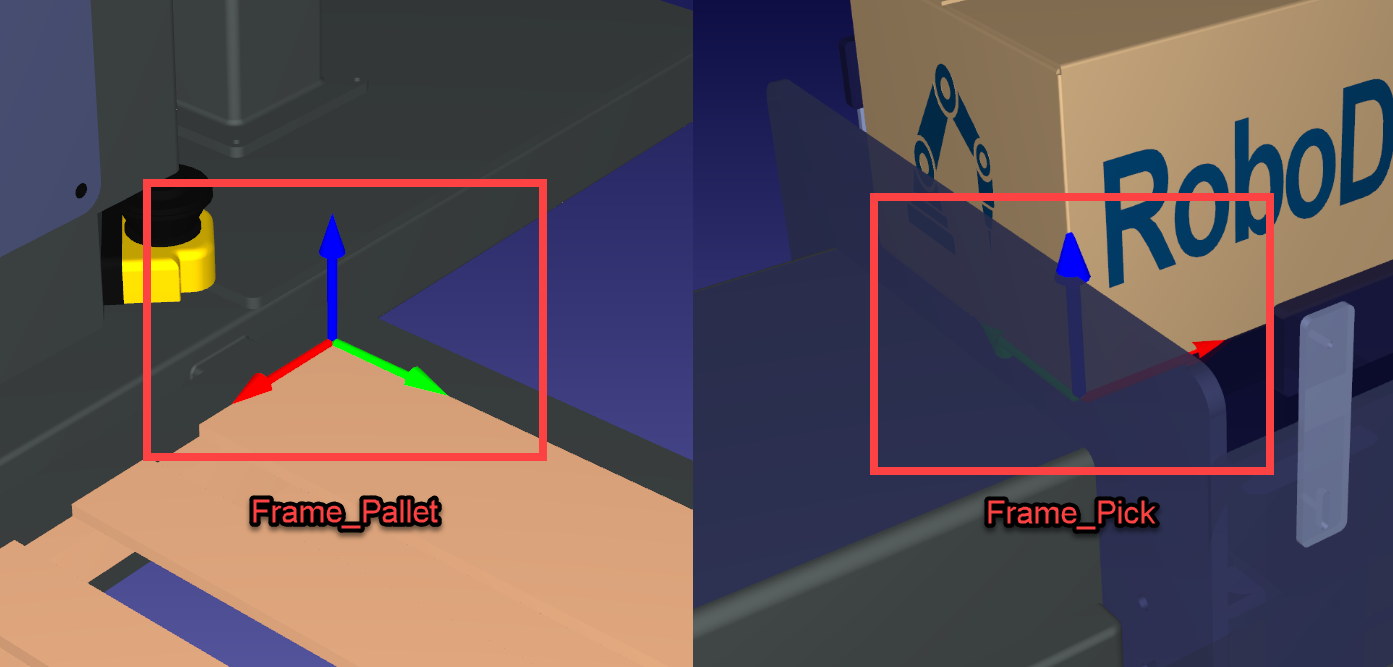
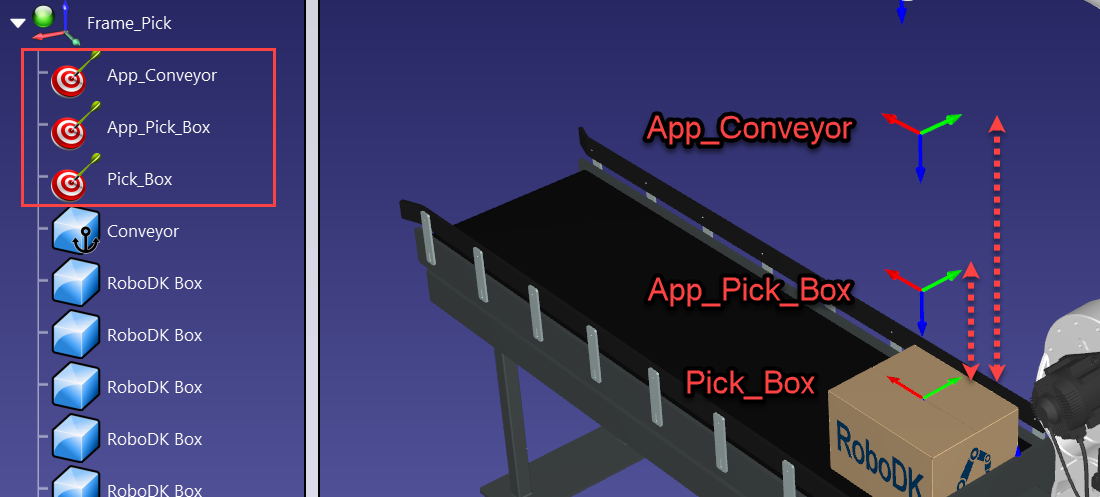
2.Os frames de referência do palete devem ser orientados com seu eixo X+ apontando na direção do comprimento do palete.
3.Os frames de referência do palete devem ser orientados com seu eixo Z+ normal ao palete (apontando para cima).
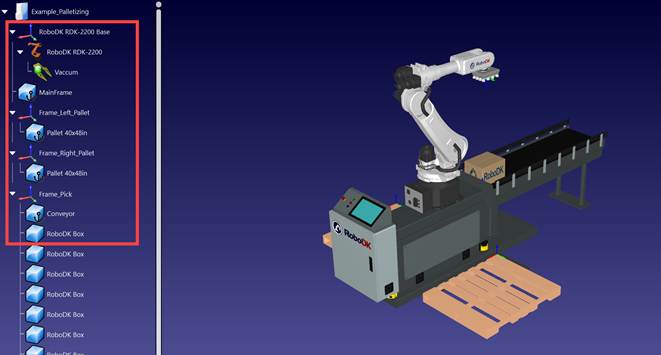
4.Certifique-se de associar o palete e a caixa a seus respectivos frames de referência. Isso serve para garantir que, se você precisar movê-los, os pontos do robô terão suas posições atualizadas automaticamente em tempo real.
5.Reposicione os diferentes objetos/frames conforme necessário.
6.Clone a caixa várias vezes copiando-a e colando-a em "Frame_Pick" para que você possa fazer várias escolhas.
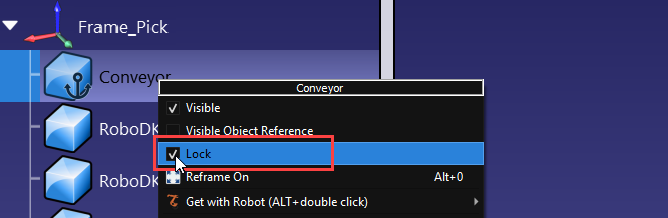
7.Certifique-se de travar os objetos 3D, mas não as caixas, em suas estruturas clicando com o botão direito do mouse e depois em "Travar".
Criar Pick and Drop
O assistente de paletização exige que você forneça um subprograma para selecionar uma nova caixa e um subprograma para posicionar a caixa. O programa "PlaceBox" serve apenas para retirar a caixa da pinça e transferi-la para a estrutura do palete; os pontos de colocação reais serão criados automaticamente pelo Add-in de paletização posteriormente.
Siga estas etapas para criar um programa de coleta "PickBox" e um programa de descarte "PlaceBox":
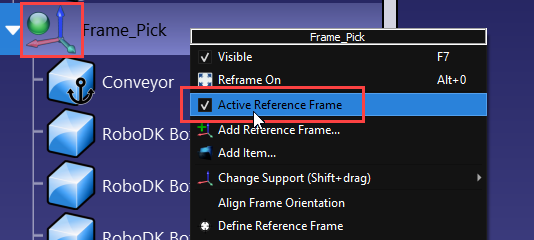
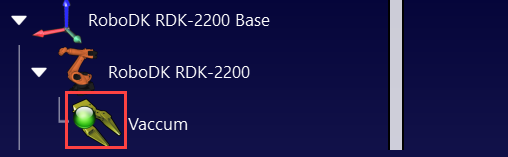
1.Primeiro, certifique-se de ativar o "Frame_Pick" e de ter sua ferramenta ativa antes de criar novos pontos. Se estiverem ativos, eles deverão ter um círculo verde.
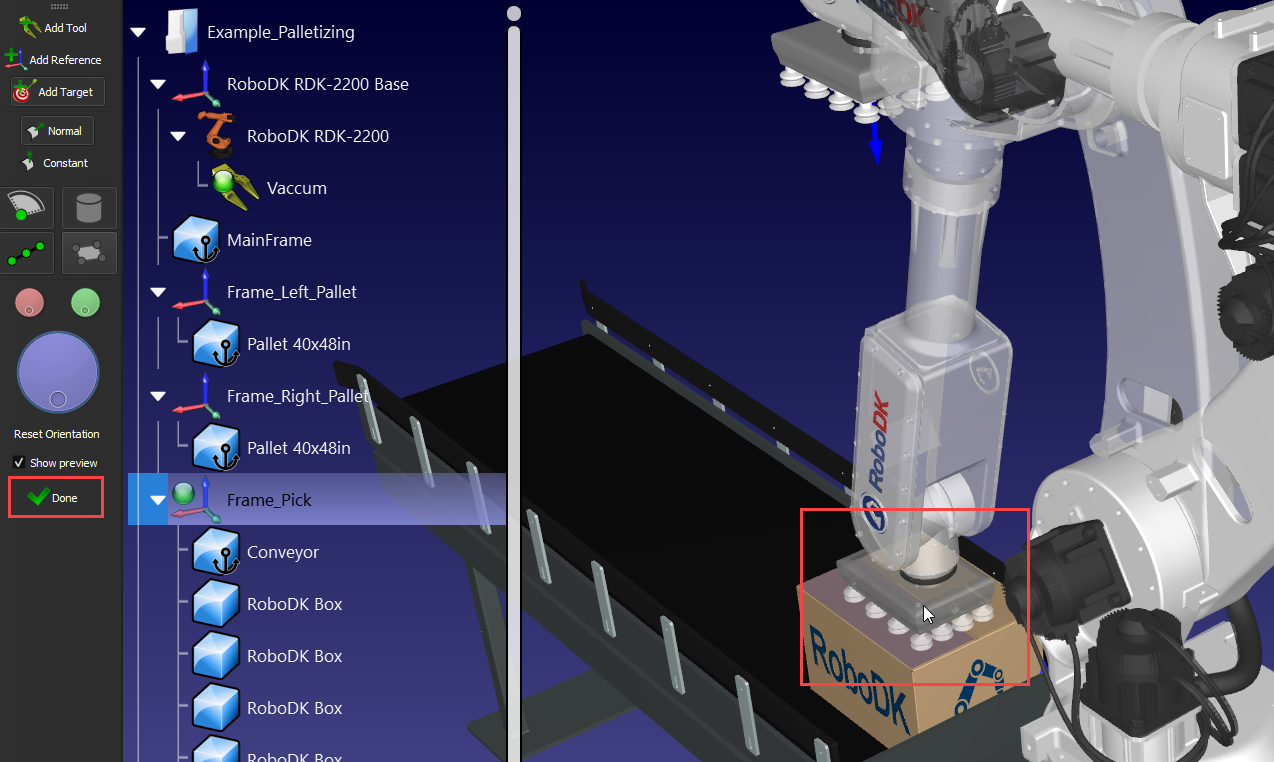
2.Na guia "Programa", selecione "Marcar ponto(s) na superfície". Clique na parte superior da caixa e, em seguida, clique em "Concluído".
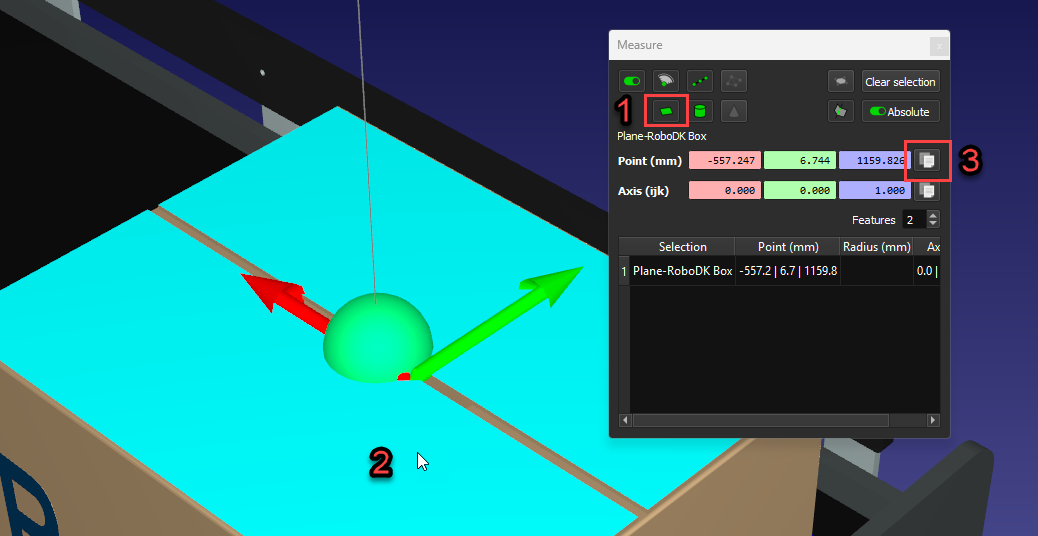
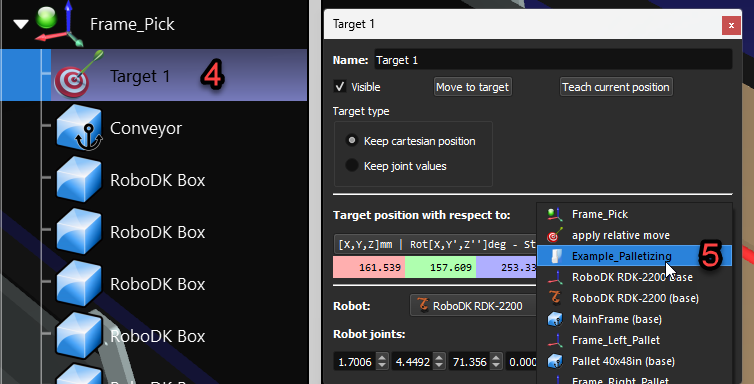
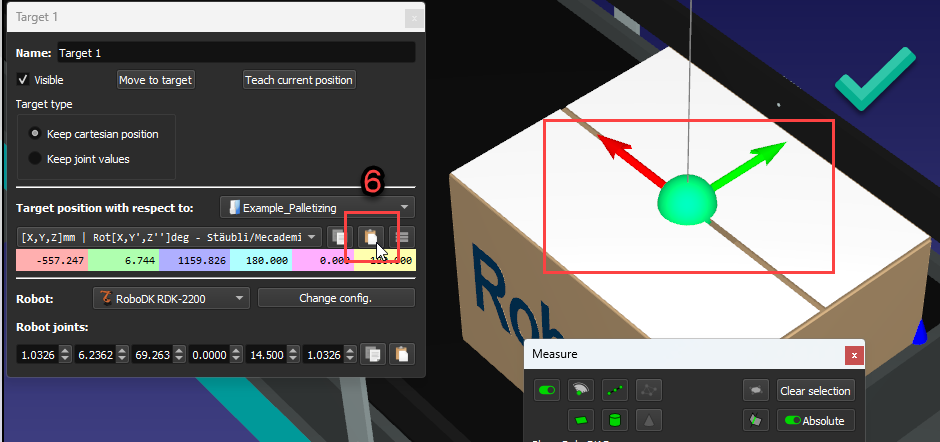
3.Agora Você deve ter o primeiro ponto na parte inferior do "Frame_Pick". Para garantir que ele esteja centralizado na parte superior da caixa, mantenha SHIFT+M pressionado para abrir a ferramenta de medição e, em seguida, clique na parte superior da caixa e copie os valores. Em seguida, clique no ponto e pressione F3 para editar os parâmetros do ponto. Escolha a origem da estação como referência e cole os valores. O ponto agora deve estar no centro da caixa.
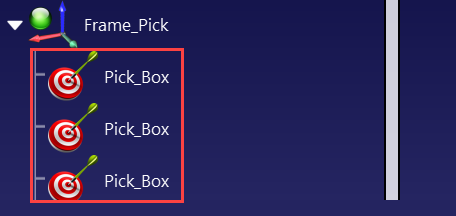
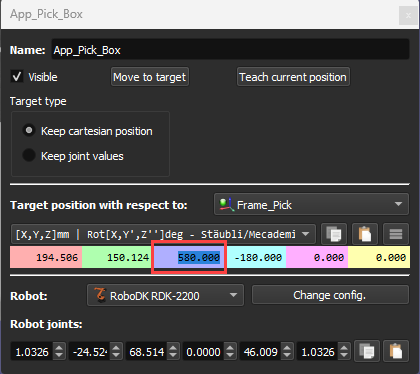
4.Renomeie seu destino para "Pick_Box" e copie/cole-o duas vezes em "Frame_Pick". Renomeie-os como "App_Pick_Box" e "App_Conveyor". Em seguida, edite os parâmetros do ponto e adicione alguma distância nos valores Z usando a roda de rolagem até que você esteja satisfeito com as posições do ponto.
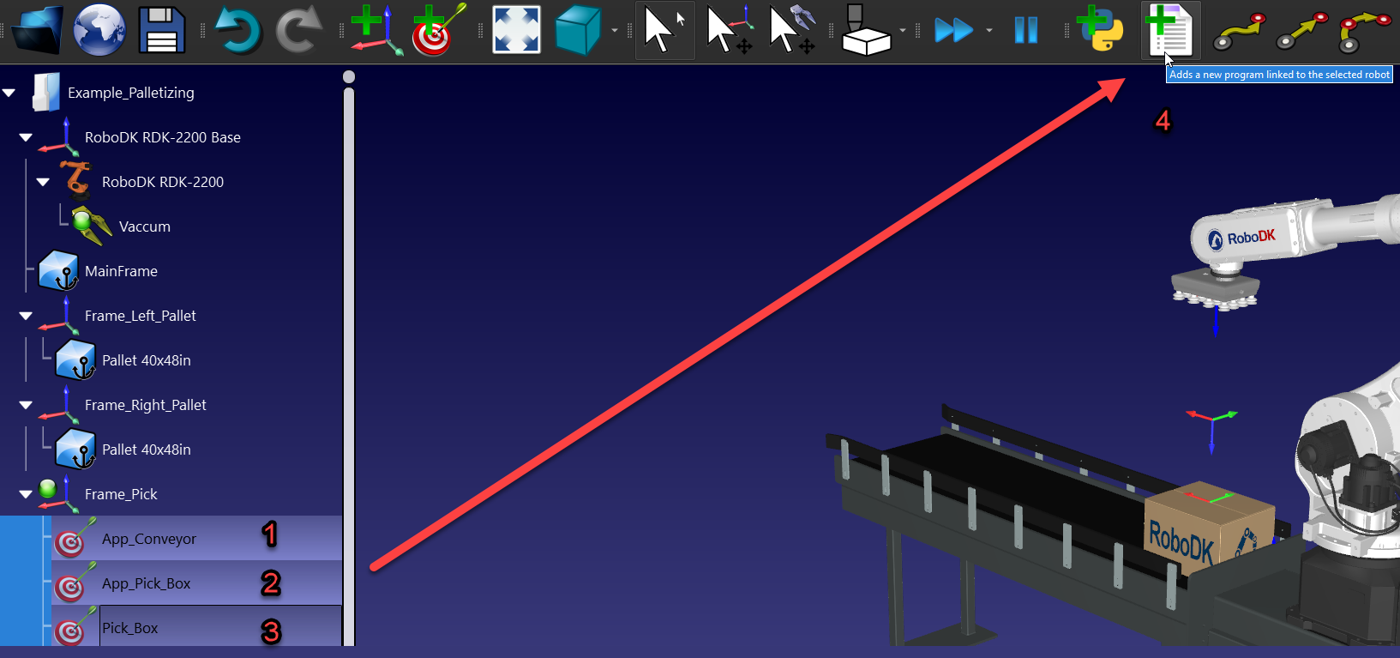
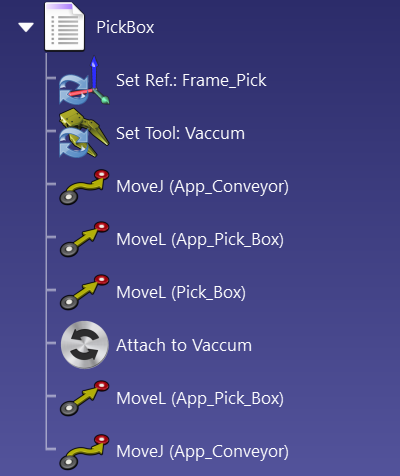
5.Mantendo pressionada a tecla CTRL, clique em todos os três pontos na ordem em que deseja que o programa os execute e clique em "Criar programa". Isso deve adicionar automaticamente os pontos, a ferramenta e o frame de referência ao programa. Renomeie o programa para "PickBox".
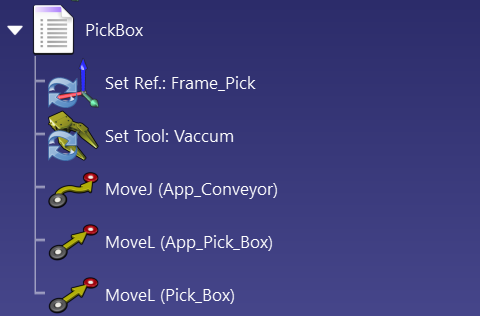
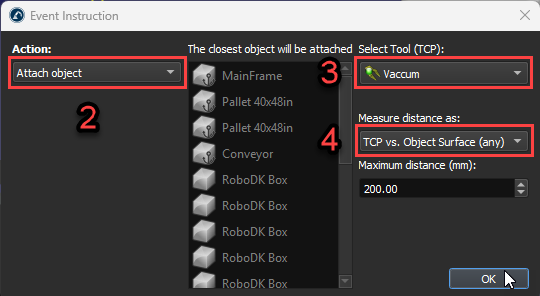
6.Add-in um "Evento", selecione "Anexar objeto", certifique-se de que a ferramenta correta esteja selecionada e escolha " TCP vs. superfície do objeto (qualquer)" nas opções de distância de medição. Isso anexará a caixa à ferramenta. Copie e cole os pontos "App_Pick_Box" e "App_Conveyor" seguindo o evento anexado. Agora Você deve ter um programa de picking em funcionamento
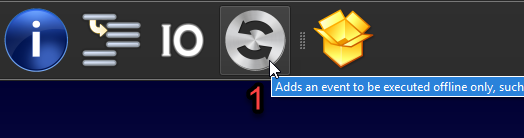
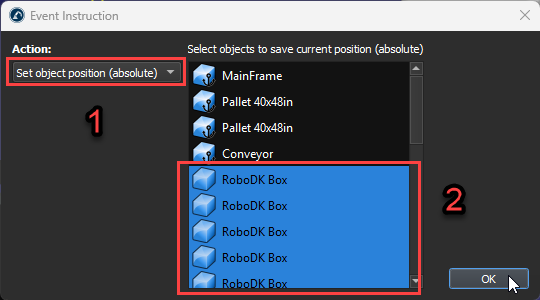
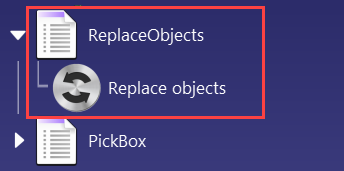
7.Crie um programa vazio, adicione um evento, selecione "Definir posição do objeto (absoluta)" e selecione todas as caixas. Esse programa moverá as caixas de volta à posição original para que você possa redefinir a estação com um clique. Renomeie o programa para "ReplaceObjects".
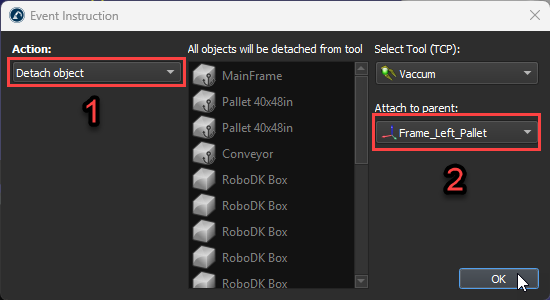
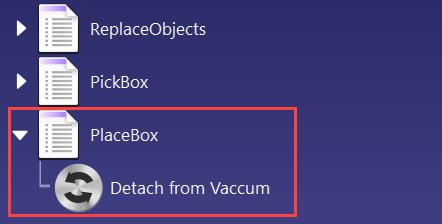
8.Crie outro projeto vazio, adicione um evento, selecione "Desanexar objeto" e selecione o frame de referência ao qual deseja que a caixa seja anexada após ser colocada; no nosso caso, será "Frame_Left_Pallet". Renomeie o programa para "PlaceBox".
9.Por fim, o último requisito que falta é um ponto que será usado como referência de configuração. Ative o frame de referência do palete, mova o robô para cima dele, verifique se a configuração do robô faz sentido e, em seguida, crie um ponto. Renomeie-o para "Ref_Pallet".
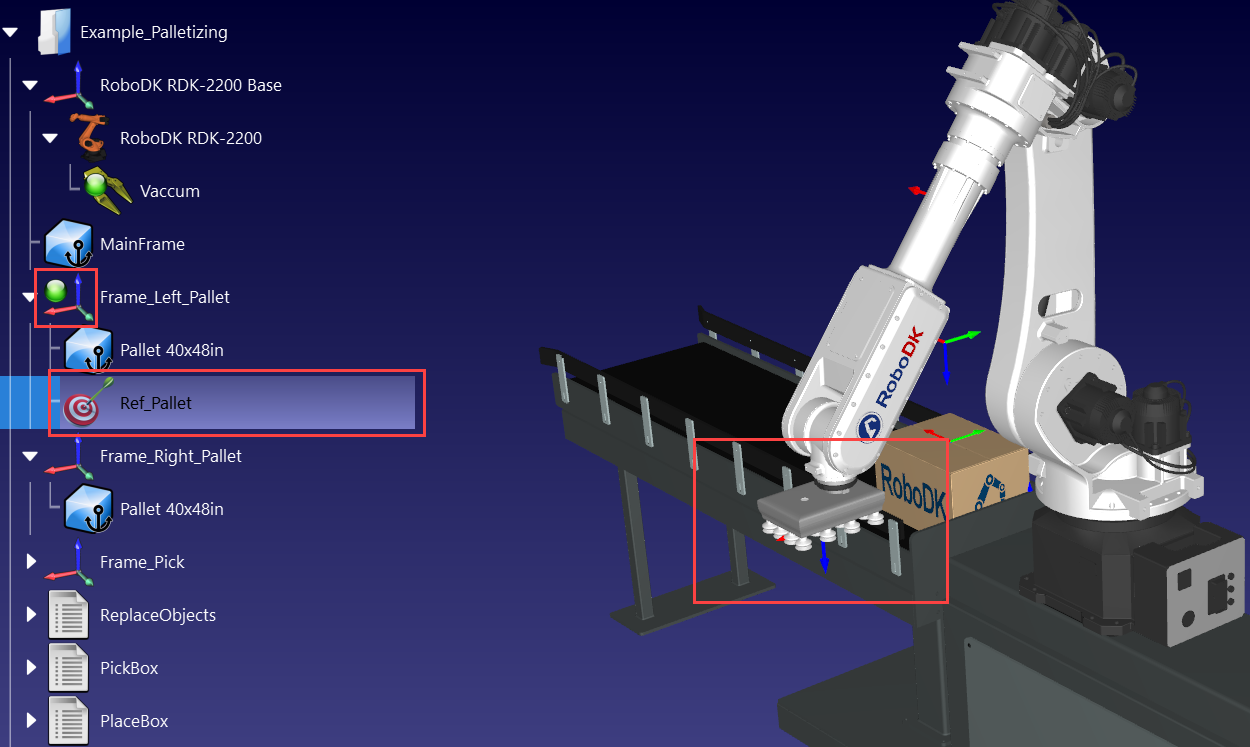
Agora você tem tudo pronto para criar seu projeto de paletização. Sua estação deve ter a seguinte aparência: