Configurações do plug-in
Selecione o botão Settings para abrir as configurações relacionadas ao plugin RoboDK para o BobCAD-CAM.
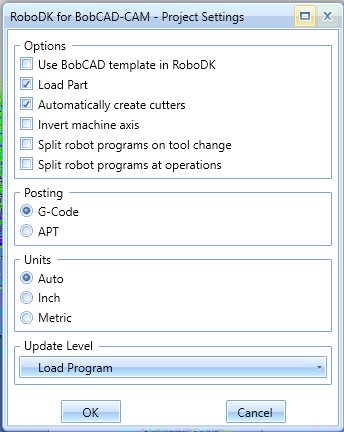
Entre outras coisas, você pode modificar as seguintes opções:
1.Use o modelo do BobCAD-CAM em vez do modelo do RoboDK (os modelos de cores e navegação 3D no RoboDK corresponderão ao estilo do BobCAD-CAM).
2.Carregue e atualize a peça no RoboDK toda vez que você lançar uma nova operação de usinagem. Somente os sólidos e as superfícies visíveis serão carregados.
3.Marcar a opção Inverter o eixo da máquina-ferramenta permite que você considere automaticamente o eixo Z da ferramenta apontando para o lado interno da ferramenta (em vez de apontar para o lado externo).
4.Use arquivos G-Code em vez de arquivos APT. O RoboDK pode ler os seguintes arquivos para gerar simulações e programas de robôs:
a.Arquivos APT (opção padrão): Carrega os arquivos APT nativos do BobCAD-CAM no RoboDK. Esse é o método preferido para a maioria das operações.
b.Arquivos de código G: Gera arquivos de usinagem de código G. Observe que esse formato depende do pós-processador que você selecionar e foi projetado principalmente para trabalhar com percursos de ferramentas de usinagem de 3 eixos.