RoboDK Plugin for BobCAD-CAM
Introdução ao BobCAD-CAM
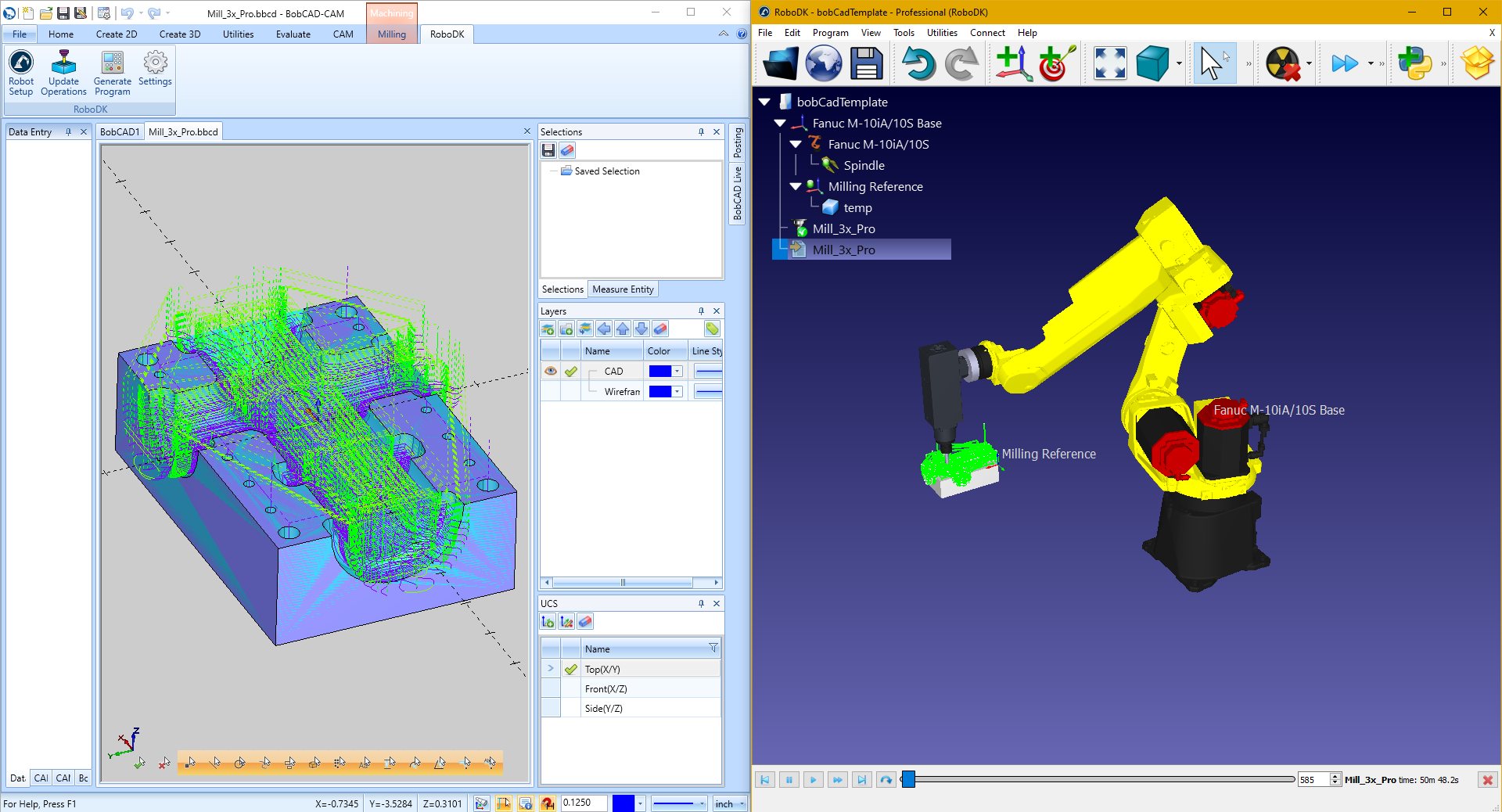
O Add-in do RoboDK para BobCAD-CAM permite que você configure rapidamente projetos de usinagem com robôs diretamente do software BobCAD-CAM. Com a integração do RoboDK para o software BobCAD-CAM, você pode combinar facilmente o software de usinagem BobCAD-CAM com o RoboDK para simular e programar robôs industriais para usinagem com robôs.
Com o Add-in do BobCAD, você pode facilmente gerar programas sem erros para a usinagem com robôs diretamente do software BobCAD-CAM. Como alternativa, o RoboDK também suporta arquivos de usinagem APT CLS e G-code.
Mais informações sobre o RoboDK para usinagem com robôs estão disponíveis na Seção de Usinagem com robôs. Saiba mais sobre o software BobCAD-CAM visitando o site do BobCAD.
Este documento descreve como configurar o plug-in do RoboDK para o software BobCAD-CAM.
Instalação do Add-in BobCAD-CAM
Siga estas etapas para instalar o Add-In RoboDK para o BobCAD-CAM. Certifique-se de usar o BobCAD-CAM v3.4 ou posterior.
1.Abra a pasta do plugin BobCAD-CAM no RoboDK:
C:/RoboDK/Other/Plugin-BobCADCAM
Como alternativa, você pode fazer o download do plugin do RoboDK para o BobCAD-CAM
https://robodk.com/files/upload/BobCAD-CAM-RoboDK-plugin.zip
E marcar o plug-in como seguro:
clique com o botão direito do mouse na pasta ZIP, selecione Propriedades e marque a opção Desbloquear.
2.Execute o arquivo Install.bat .
Se a execução do arquivo Install.BAT falhar, você pode extrair o conteúdo da pasta ZIP para a pasta:
C:\BobCAD-CAM Data\BobCAD-CAM V34
Ou em seu diretório de instalação equivalente. Se necessário, mescle o conteúdo.
3.Reinicie o software BobCAD-CAM.
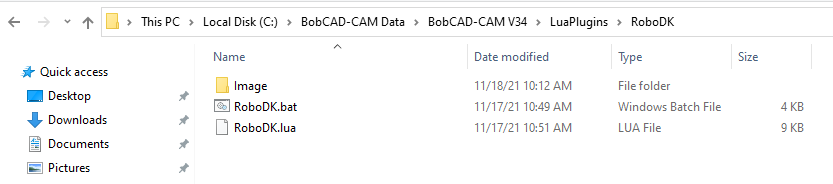
A pasta de instalação do plug-in deve ter a aparência mostrada na imagem a seguir.
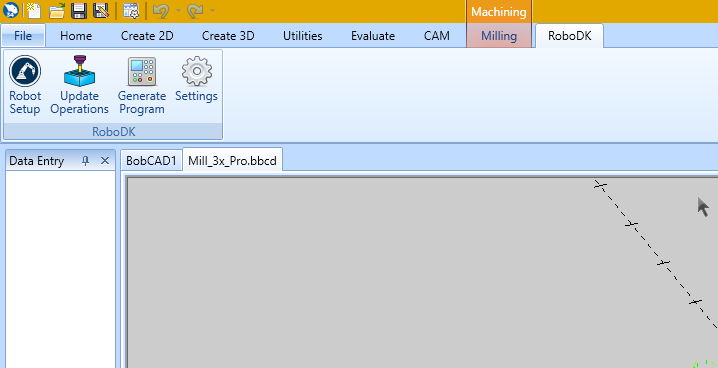
Barra de ferramentas
Ao abrir o software BobCAD-CAM, você verá uma barra de ferramentas do RoboDK. Selecione essa guia do RoboDK para ver as opções disponíveis para configurar o projeto de usinagem do robô no RoboDK.
Configuração do robô
O botão Robot Setup 
Você pode alterar facilmente o robô, modificar a ferramenta e/ou o quadro de referência. Por exemplo, siga estas etapas para alterar o robô:
1.Clique com o botão direito do mouse no robô
2.Selecione Replace robot (Substituir robô) (como mostrado na imagem)
3.Selecione o novo robô
O instalador do RoboDK fornece apenas alguns robôs por padrão; no entanto, é possível fazer o download de mais robôs da biblioteca on-line.
Mais informações sobre como adicionar uma ferramenta robótica estão disponíveis na seção Introdução.
Mantenha Alt+Shift pressionados para mover uma ferramenta do robô (TCP). Isso é útil para definir a pose do robô antes de ensinar um alvo.
Salve o projeto para manter as alterações selecionando Arquivo ➔ Salvar Estação (Ctrl+S).
Atualizar operações selecionadas
Selecione o botão Atualizar operações para enviar o caminho da ferramenta de usinagem do software BobCAD-CAM para o RoboDK. Isso substituirá qualquer projeto de usinagem de robô existente que tenha o mesmo nome.
Uma marca de seleção verde será exibida se o programa for viável com o robô selecionado. Se houver algum problema (como singularidades, limites de eixo ou problemas de alcance), será exibida uma marca vermelha com uma mensagem sobre o problema.
Clique duas vezes no projeto de usinagem do robô
Clique com o botão direito do mouse em um programa e selecione Executar para simulá-lo (ou clique duas vezes no programa). Você também pode selecionar Gerar programa do robô (F6) para obter o programa do robô que precisa ser carregado no controlador do robô. Mais informações sobre como gerar programas de robô estão disponíveis na seção Programação off-line.
Se necessário, clique com o botão direito do mouse em um programa e selecione Selecionar Pós-Processador para alterar o pós-processador. Essa etapa pode ajudá-lo a personalizar a aparência do código gerado. Mais informações sobre como selecionar e personalizar pós-processadores estão disponíveis na seção de pós-processadores.
Gerar programa
Você pode gerar programas de robô diretamente do software BobCAD-CAM quando a estação RoboDK estiver pronta. Para isso, selecione Gerar programa. Essa opção atualizará os programas do robô de acordo com o caminho da ferramenta de usinagem definido no seu projeto BobCAD-CAM.
Siga estas etapas no RoboDK para visualizar ou modificar a localização dos programas de seu robô:
1.Selecione Ferramentas-Opções
2.Selecione a guia Programa
3.Selecione Definir na pasta de programas do Robô
Configurações do plug-in
Selecione o botão Settings para abrir as configurações relacionadas ao plugin RoboDK para o BobCAD-CAM.
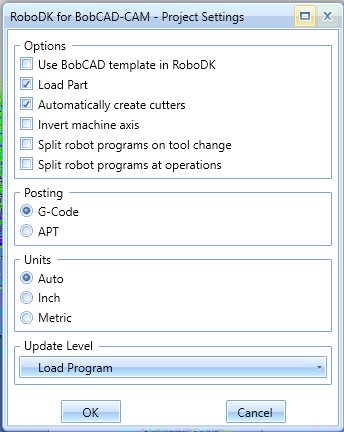
Entre outras coisas, você pode modificar as seguintes opções:
1.Use o modelo do BobCAD-CAM em vez do modelo do RoboDK (os modelos de cores e navegação 3D no RoboDK corresponderão ao estilo do BobCAD-CAM).
2.Carregue e atualize a peça no RoboDK toda vez que você lançar uma nova operação de usinagem. Somente os sólidos e as superfícies visíveis serão carregados.
3.Marcar a opção Inverter o eixo da máquina-ferramenta permite que você considere automaticamente o eixo Z da ferramenta apontando para o lado interno da ferramenta (em vez de apontar para o lado externo).
4.Use arquivos G-Code em vez de arquivos APT. O RoboDK pode ler os seguintes arquivos para gerar simulações e programas de robôs:
a.Arquivos APT (opção padrão): Carrega os arquivos APT nativos do BobCAD-CAM no RoboDK. Esse é o método preferido para a maioria das operações.
b.Arquivos de código G: Gera arquivos de usinagem de código G. Observe que esse formato depende do pós-processador que você selecionar e foi projetado principalmente para trabalhar com percursos de ferramentas de usinagem de 3 eixos.