Comandos
Esta seção descreve os comandos do RoboDK Add-in disponíveis no FeatureCAM para usinagem com robôs.
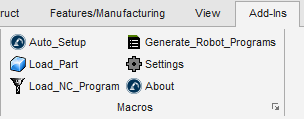
●A macro Auto Setup carrega automaticamente a peça e o programa de usinagem no RoboDK.
●Load Part carrega automaticamente o modelo 3D de sua peça no RoboDK.
●Load NC Program cria automaticamente um projeto de usinagem de robô no RoboDK para simular seu robô e criar um programa de robô para usinagem de robô.
●O Generate Robot Programs gera automaticamente os programas de robôs disponíveis no RoboDK.
●Settings abre a janela de configurações adicionais.
●About abre este documento de ajuda.
Configuração automática
O Auto Setup
A configuração automática carregará/atualizará o modelo 3D e o caminho da ferramenta de Usinagem com robôs no RoboDK.
Se você já tiver uma estação RoboDK aberta, ela usará o projeto RoboDK existente sem substituir o robô, a ferramenta ou o sistema de coordenadas.
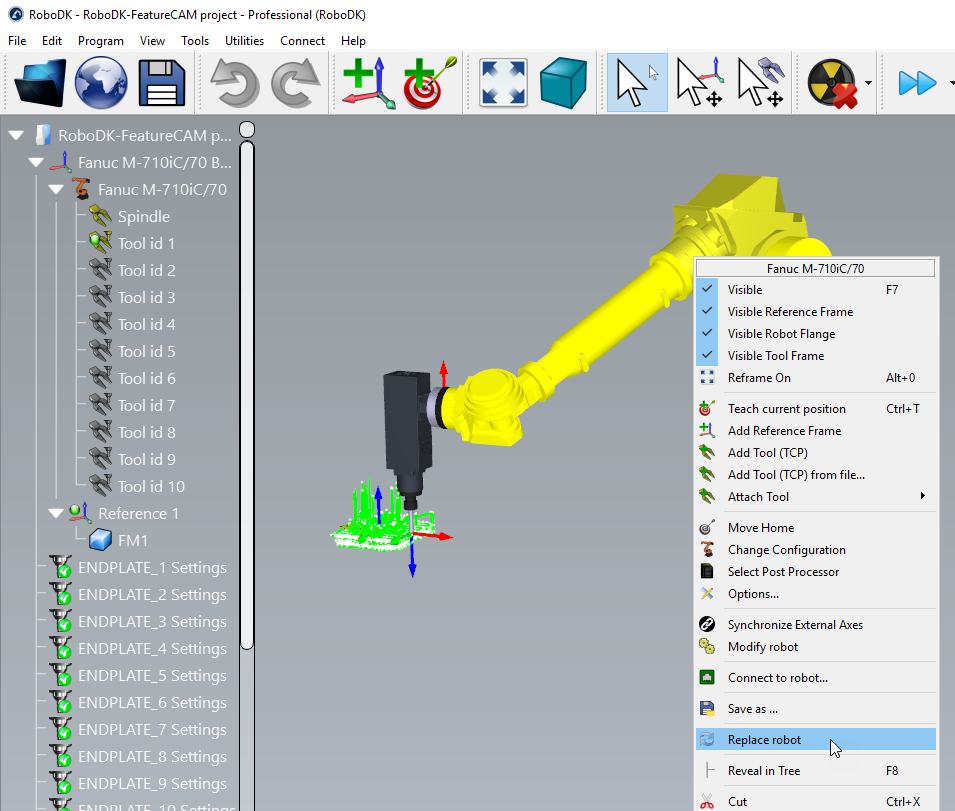
Você pode alterar facilmente o robô, modificar a ferramenta e/ou o frame de referência. Por exemplo, siga estas etapas para alterar o robô:
1.Clique com o botão direito do mouse no robô
2.Selecione Substituir robô (como mostrado na imagem a seguir)
3.Selecione o robô que você gostaria de usar
O instalador do RoboDK fornece apenas alguns robôs por padrão; no entanto, é possível fazer o download de mais robôs na biblioteca on-line.
Mais informações sobre como adicionar uma ferramenta de robô estão disponíveis na seção Introdução.
Para manter as alterações, salve o projeto selecionando Arquivo ➔ Salvar Estação (Ctrl+S).
Depois de atualizar a célula do robô, selecione Utilitários➔ Atualizar projeto de usinagem com robôs para atualizar todos os programas. Uma marca de seleção verde será exibida se os programas forem viáveis com os parâmetros atuais da célula. Se houver algum problema (como singularidades, limites de eixo ou problemas de alcance), será exibida uma marca vermelha.
Clique duas vezes no projeto de Usinagem com robôs
Clique com o botão direito do mouse em um programa e selecione Executar para simulá-lo (ou clique duas vezes no programa). Você também pode selecionar Gerar programa de robô (F6) para gerar o programa do robô para o controlador do robô. Mais informações sobre como gerar programas de robô estão disponíveis na seção Programação off-line.
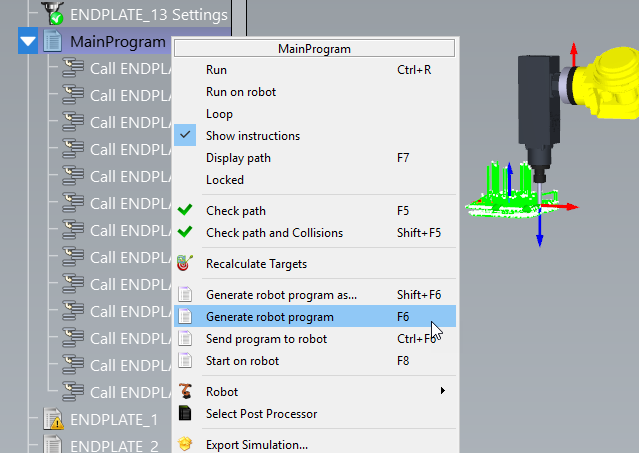
Você também pode clicar com o botão direito do mouse em um programa e selecionar Selecionar Pós-processador para alterar o pós-processador. Mais informações sobre pós-processadores estão disponíveis na seção de pós-processadores.
Gerar programas de robôs
Selecione Gerar programas de robô para gerar os programas do robô para a Usinagem com robôs. Essa operação abrirá uma nova janela (editor de programas) que exibe os programas do robô.

Siga estas etapas no RoboDK para alterar o local dos programas salvos do robô:
1.Selecione Ferramentas - Opções
2.Selecionar Programa
3.Selecione Definir ao lado da pasta de programas do Robô
Configurações do plug-in
Selecione a macro Settings para abrir as configurações da FeatureCAM relacionadas ao RoboDK. Você verá a janela de configurações mostrada na imagem a seguir.
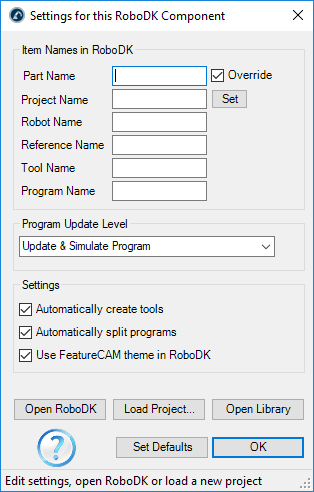
Você pode modificar as seguintes opções:
1.Part name é o nome do modelo 3D quando ele é carregado no RoboDK. Deixe-o em branco para usar automaticamente o nome usado no FeatureCAM.
2.O nome do projeto permite que você especifique um arquivo de projeto do RoboDK (RDK). É possível especificar um projeto padrão do RoboDK (arquivo RDK) para exibir automaticamente as simulações ou gerar programas de robôs. Deixe em branco para usar automaticamente o projeto aberto no momento no RoboDK.
3.Criar ferramentas automaticamente permite que você crie automaticamente novos TCPs com base no porta-ferramentas e na geometria da fresa definidos no FeatureCAM. A primeira ferramenta mantida pelo robô é considerada o porta-ferramenta e os novos TCPs são calculados como um desvio do porta-ferramenta.
4.A divisão automática de programas dividirá automaticamente o projeto completo de Usinagem com robôs em subprojetos (operações). Criando uma operação para cada ferramenta.
5.O uso do tema do FeatureCAM no RoboDK fará com que a navegação 3D e as cores de fundo no RoboDK correspondam ao estilo do FeatureCAM.
Você também pode especificar o suporte da ferramenta e o frame de referência (ponto de referência) para as operações de Usinagem com robôs.
Selecione Carregar projeto... para visualizar o projeto aberto recentemente ou criar um novo projeto usando a configuração padrão
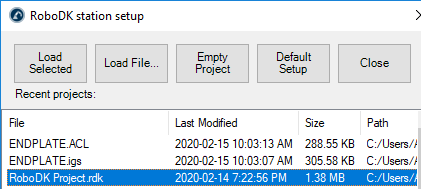
As seguintes opções estão disponíveis:
●Load Selected (Carregar selecionado): Carregar um projeto anterior usado no RoboDK (arquivo RDK)
●Load File...: Selecione um arquivo de estação do RoboDK (RDK) para abri-lo com o RoboDK e usá-lo como projeto padrão com o projeto atual da FeatureCAM.
●Projeto vazio: Abra o RoboDK com uma nova estação vazia para construir uma nova configuração. Mais informações sobre como configurar um novo projeto do zero estão disponíveis na seção Introdução.
●Load Part (Carregar peça): Carregar a peça do FeatureCAM para o RoboDK (a peça será salva como um arquivo STL e carregada automaticamente).
●Configuração padrão: Configure a nova estação com um robô, fuso e frame de referência padrão. A peça também será exportada automaticamente para o RoboDK.
Visite a seção de usinagem com robôs para obter mais informações sobre a construção de uma nova configuração para usinagem com robôs.