Configuração automática
O Auto Setup
A configuração automática carregará/atualizará o modelo 3D e o caminho da ferramenta de Usinagem com robôs no RoboDK.
Se você já tiver uma estação RoboDK aberta, ela usará o projeto RoboDK existente sem substituir o robô, a ferramenta ou o sistema de coordenadas.
Você pode alterar facilmente o robô, modificar a ferramenta e/ou o frame de referência. Por exemplo, siga estas etapas para alterar o robô:
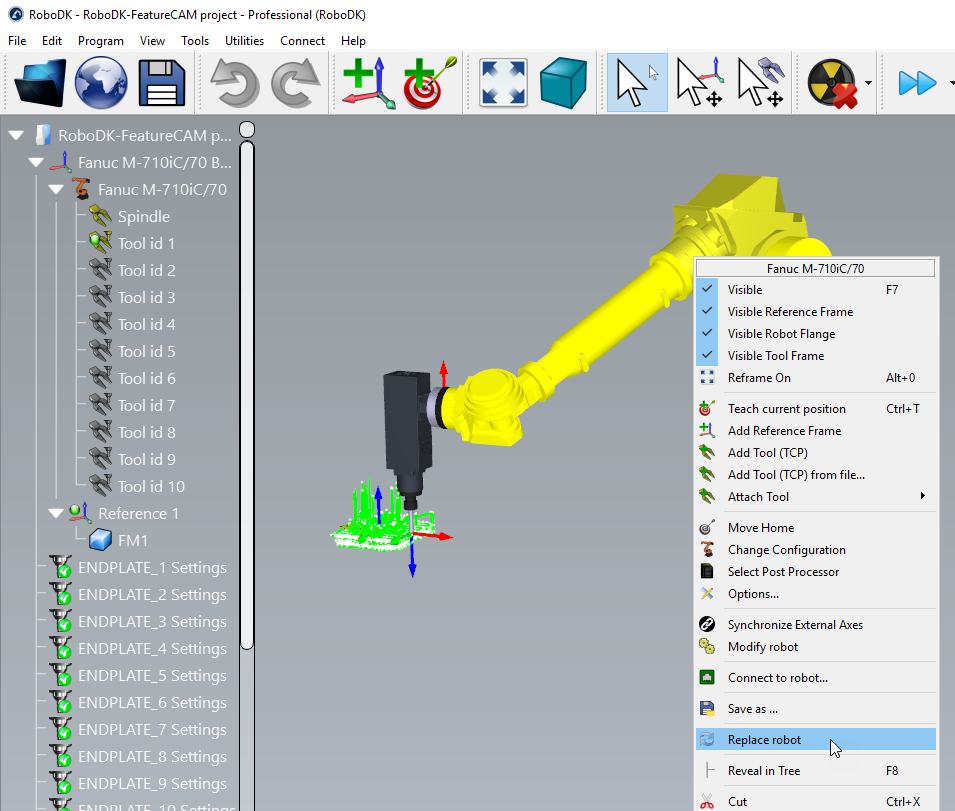
1.Clique com o botão direito do mouse no robô
2.Selecione Substituir robô (como mostrado na imagem a seguir)
3.Selecione o robô que você gostaria de usar
O instalador do RoboDK fornece apenas alguns robôs por padrão; no entanto, é possível fazer o download de mais robôs na biblioteca on-line.
Mais informações sobre como adicionar uma ferramenta de robô estão disponíveis na seção Introdução.
Para manter as alterações, salve o projeto selecionando Arquivo ➔ Salvar Estação (Ctrl+S).
Depois de atualizar a célula do robô, selecione Utilitários➔ Atualizar projeto de usinagem com robôs para atualizar todos os programas. Uma marca de seleção verde será exibida se os programas forem viáveis com os parâmetros atuais da célula. Se houver algum problema (como singularidades, limites de eixo ou problemas de alcance), será exibida uma marca vermelha.
Clique duas vezes no projeto de Usinagem com robôs
Clique com o botão direito do mouse em um programa e selecione Executar para simulá-lo (ou clique duas vezes no programa). Você também pode selecionar Gerar programa de robô (F6) para gerar o programa do robô para o controlador do robô. Mais informações sobre como gerar programas de robô estão disponíveis na seção Programação off-line.
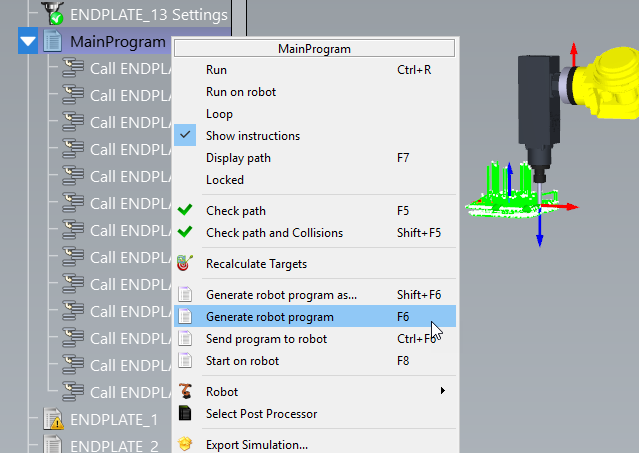
Você também pode clicar com o botão direito do mouse em um programa e selecionar Selecionar Pós-processador para alterar o pós-processador. Mais informações sobre pós-processadores estão disponíveis na seção de pós-processadores.