Configurações do plug-in
Selecione a macro Settings para abrir as configurações da FeatureCAM relacionadas ao RoboDK. Você verá a janela de configurações mostrada na imagem a seguir.
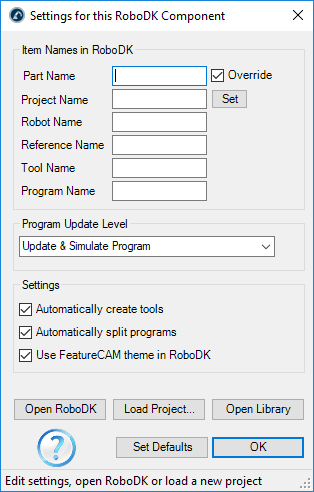
Você pode modificar as seguintes opções:
1.Part name é o nome do modelo 3D quando ele é carregado no RoboDK. Deixe-o em branco para usar automaticamente o nome usado no FeatureCAM.
2.O nome do projeto permite que você especifique um arquivo de projeto do RoboDK (RDK). É possível especificar um projeto padrão do RoboDK (arquivo RDK) para exibir automaticamente as simulações ou gerar programas de robôs. Deixe em branco para usar automaticamente o projeto aberto no momento no RoboDK.
3.Criar ferramentas automaticamente permite que você crie automaticamente novos TCPs com base no porta-ferramentas e na geometria da fresa definidos no FeatureCAM. A primeira ferramenta mantida pelo robô é considerada o porta-ferramenta e os novos TCPs são calculados como um desvio do porta-ferramenta.
4.A divisão automática de programas dividirá automaticamente o projeto completo de Usinagem com robôs em subprojetos (operações). Criando uma operação para cada ferramenta.
5.O uso do tema do FeatureCAM no RoboDK fará com que a navegação 3D e as cores de fundo no RoboDK correspondam ao estilo do FeatureCAM.
Você também pode especificar o suporte da ferramenta e o frame de referência (ponto de referência) para as operações de Usinagem com robôs.
Selecione Carregar projeto... para visualizar o projeto aberto recentemente ou criar um novo projeto usando a configuração padrão
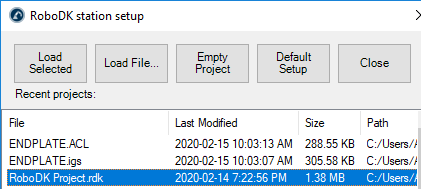
As seguintes opções estão disponíveis:
●Load Selected (Carregar selecionado): Carregar um projeto anterior usado no RoboDK (arquivo RDK)
●Load File...: Selecione um arquivo de estação do RoboDK (RDK) para abri-lo com o RoboDK e usá-lo como projeto padrão com o projeto atual da FeatureCAM.
●Projeto vazio: Abra o RoboDK com uma nova estação vazia para construir uma nova configuração. Mais informações sobre como configurar um novo projeto do zero estão disponíveis na seção Introdução.
●Load Part (Carregar peça): Carregar a peça do FeatureCAM para o RoboDK (a peça será salva como um arquivo STL e carregada automaticamente).
●Configuração padrão: Configure a nova estação com um robô, fuso e frame de referência padrão. A peça também será exportada automaticamente para o RoboDK.
Visite a seção de usinagem com robôs para obter mais informações sobre a construção de uma nova configuração para usinagem com robôs.