Configurações
Você pode alterar as configurações padrão do plug-in do RoboDK selecionando o botão Settings.
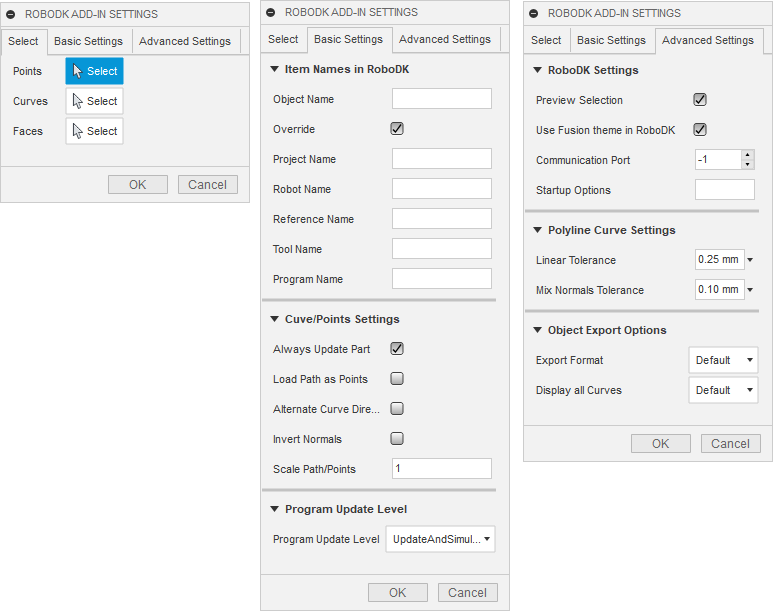
Configurações básicas:
●Object Name - Defina o nome do objeto de curva/pontos que será carregado no RoboDK. Se essa caixa for deixada em branco, será usado o nome da peça ou do arquivo de montagem.
●Override - Substitui o objeto carregado anteriormente no RoboDK se houver uma correspondência de nome.
●Project Name - Defina o nome/caminho do projeto/estação do RoboDK (arquivo .RDK) a ser usado. Se o arquivo já estiver carregado, ele usará o projeto existente. Se o projeto aberto no RoboDK não corresponder ao nome do arquivo, ele abrirá o projeto se o caminho completo for especificado.
●Robot Name (Nome do robô) - Defina o nome do robô que será usado no RoboDK (se você tiver mais de um robô em seu projeto). O nome do robô deve corresponder ao nome visível na árvore de estações do RoboDK. Deixe esse valor em branco (padrão) para usar o primeiro ou único robô disponível.
●Reference Name (Nome de referência) - Defina o nome do quadro de referência para posicionar o caminho em relação ao robô. O nome deve corresponder ao nome visível na árvore de estações do RoboDK. Se um nome não for fornecido, o frame de referência de ativo
●Tool Name (Nome da ferramenta) - Defina o nome da ferramenta (TCP) a ser usada com o robô para seguir o caminho. O nome deve corresponder ao nome visível na árvore de estações do RoboDK. Se não for fornecido um nome, será usado o Frame de Ferramentaativo
●Program Name (Nome do programa) - Defina o nome do arquivo de programa que será gerado.
●Always Update Part - Marque essa opção para sempre atualizar o modelo 3D do Fusion para o RoboDK. Isso atualizará a peça quando você selecionar curvas ou pontos.
●Load Path as Points (Carregar caminho como pontos) - Marque essa opção para converter uma curva em pontos, de modo que um projeto de seguimento de pontos seja criado no RoboDK. Isso é útil para operações de fabricação, como perfuração. Desmarque essa opção para carregar o caminho como um projeto de seguimento de curva.
●Alternate Curve Directions (Direções de curva alternadas) - Marque essa opção para alternar a direção do movimento a cada passagem (padrão Zig-Zag).
●Invert Normals (Inverter normais) - Marque essa opção para inverter as normais de superfície calculadas. Isso inverterá a orientação da ferramenta do robô.
Configurações avançadas:
●Use Fusion theme in RoboDK (Usar tema do Fusion 360 no RoboDK) - Inicie o RoboDK com o tema do Autodesk Fusion 360. Isso inclui a alteração do comportamento do mouse para navegação 3D e a cor do plano de fundo. Essas configurações podem ser alteradas no menu do RoboDK: Ferramentas - Opções.
●Communication Port (Porta de comunicação) - Defina a porta de comunicação para se comunicar com o RoboDK. Várias instâncias do RoboDK podem estar sendo executadas ao mesmo tempo e usar configurações diferentes se uma porta diferente for usada. Quando esse valor é definido como -1 (padrão), a porta padrão é usada (20500).
●Startup Options (Opções de Inicialização) - Defina os argumentos a serem passados para o RoboDK na primeira vez que ele for iniciado. Por exemplo, para iniciar o RoboDK silenciosamente, você pode definir '/NOSPLASH /NOSHOW /HIDDEN'. Os programas ainda podem ser gerados mesmo que o RoboDK não seja exibido. Para obter mais informações, consulte a seção Linha de Comando da API do RoboDK.
●Linear Tolerance (mm) - Define a precisão linear para dividir as curvas como um conjunto de pontos.
●Mix Normals Tolerance (mm) - Define a tolerância de distância usada para misturar cálculos normais entre várias superfícies.
●Export Format (Formato de exportação) - Selecione o formato de exportação para carregar a peça no RoboDK.
●Display all object curves (Exibir todas as curvas do objeto) - Exibe as curvas carregadas no RoboDK, mesmo que elas não estejam selecionadas. Você pode alterar essa configuração no RoboDK (Ferramentas-Opções-Exibir-Exibir Curvas).