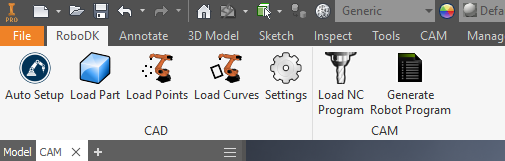
A barra de ferramentas padrão do RoboDK inclui 7 comandos para fins de CAD e CAM:
● Auto Setup (Configuração automática) - Esse botão permite que você selecione qualquer geometria (curvas ou pontos) e elas serão carregadas no RoboDK junto com o modelo 3D.
● Load Part (Carregar peça) - Carrega o modelo 3D do Inventor para o RoboDK. Recursos como curvas ou pontos não serão carregados
● Load Point(s) (Carregar pontos) - Carrega todos os pontos selecionados no RoboDK como um novo objeto. Todas as superfícies selecionadas serão usadas para calcular as normais dos pontos. Essas normais são importantes, pois definem o eixo de aproximação do robô.
● Load Curve(s) (Carregar curvas) - Carrega todas as curvas selecionadas no RoboDK como um novo item. Todas as superfícies selecionadas serão usadas para calcular as normais da curva. Essas normais são importantes, pois definirão o eixo de aproximação do robô.
●Load NC Program (Carregar programa NC) - Carrega o projeto de usinagem no RoboDK. Se várias ferramentas forem usadas para a usinagem, o RoboDK dividirá o programa para ter uma configuração de projeto para cada ferramenta. Esse comportamento pode ser alterado em Ferramentas – Opções - CAM.
● Generate Robot Program (Gerar programa do robô) - Gera todos os programas disponíveis no projeto RoboDK.
A principal diferença entre o Auto Setup e o Load Curve(s) ou Load Point(s) é que o Auto Setup carrega a peça e cria um novo projeto de seguimento de Curva/Ponto. O uso do Load Curve(s) ou Load Point(s) é mais rápido e apenas atualizará os recursos de geometria existentes no RoboDK, mantendo as configurações definidas anteriormente.
Dica: Usando as configurações padrão, se você quiser carregar mais de um objeto do Inventor, deverá renomear os objetos depois que eles forem carregados no RoboDK.