Add-in do RoboDK para o Inventor
O add-in RoboDK para o Autodesk Inventor permite que você combine os recursos de modelagem CAD/CAM 3D do Autodesk Inventor com o RoboDK para simulação de robôs, programação off-line e usinagem com robôs.
Com o add-in RoboDK para o Inventor, você pode carregar facilmente modelos 3D criados no Inventor para o RoboDK. Esse plug-in permite que você programe mais de 1000 modelos de robôs de mais de 80 fabricantes diretamente do Inventor.
Os robôs podem ser facilmente programados como máquinas de 5 eixos para uma ampla variedade de aplicações de fabricação, como perfuração, soldagem, corte, impressão 3D ou usinagem com robôs. Mais informações disponíveis na seção de usinagem com robôs.
A seção de pós-processadores de robôs mostra uma lista das marcas de robôs e controladores compatíveis. Também é possível modificar ou criar novos pós-processadores para personalizar a geração de programas.
O Add-in do RoboDK para o Autodesk Inventor funciona com o Inventor 2018 e versões posteriores. O Add-in do RoboDK Inventor é gratuito se você já tiver uma licença do RoboDK.
Instalar
Se você já tiver instalado o Autodesk Inventor e o RoboDK, deverá ter o plug-in do RoboDK para o Inventor disponível no Inventor. O plug-in do RoboDK para Inventor deve estar visível na barra de ferramentas.
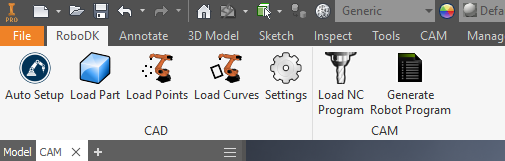
Barra de ferramentas do Inventor
A barra de ferramentas padrão do RoboDK inclui 7 comandos para fins de CAD e CAM:
●
●
●
●
●
●
●
A principal diferença entre o Auto Setup e o Load Curve(s) ou Load Point(s) é que o Auto Setup carrega a peça e cria um novo projeto de seguimento de Curva/Ponto. O uso do Load Curve(s) ou Load Point(s) é mais rápido e apenas atualizará os recursos de geometria existentes no RoboDK, mantendo as configurações definidas anteriormente.
Configurações
Você pode alterar as configurações padrão do plug-in do RoboDK selecionando o botão Settings.
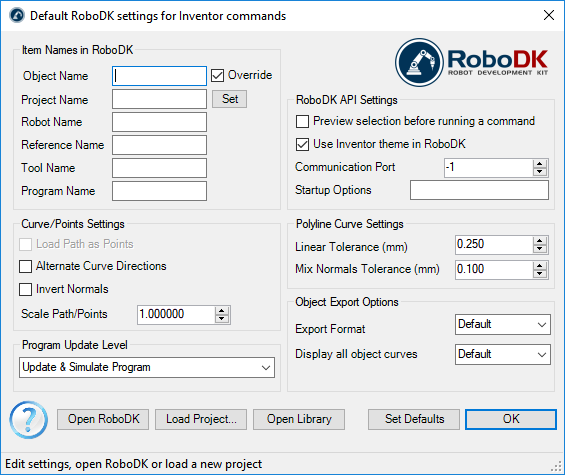
●Object Name (Nome do objeto) - Defina o nome do objeto de curva/pontos que será carregado no RoboDK. Se essa caixa for deixada em branco, será usado o nome da peça ou do arquivo de montagem.
●Override (Sobrescrever) - Substitui o objeto carregado anteriormente no RoboDK se houver uma correspondência de nome.
●Project Name (Nome do projeto) - Defina o nome/caminho do projeto/estação do RoboDK (arquivo .RDK) a ser usado. Se o arquivo já estiver carregado, ele usará o projeto existente. Se o projeto aberto no RoboDK não corresponder ao nome do arquivo, ele abrirá o projeto se o caminho completo for especificado.
●Robot Name (Nome do robô) - Defina o nome do robô que será usado no RoboDK (se você tiver mais de um robô em seu projeto). O nome do robô deve corresponder ao nome visível na árvore de estações do RoboDK. Deixe esse valor em branco (padrão) para usar o primeiro ou único robô disponível.
●Reference Name (Nome de referência) - Defina o nome do frame de referência para posicionar o caminho em relação ao robô. O nome deve corresponder ao nome visível na árvore de estações do RoboDK. Se um nome não for fornecido, o frame de referência ativo
●Tool Name (Nome da ferramenta) - Defina o nome da ferramenta (TCP) a ser usada com o robô para seguir o caminho. O nome deve corresponder ao nome visível na árvore de estações do RoboDK. Se não for fornecido um nome, será usado o Frame de Ferramentaativo
●Program Name (Nome do programa) - Defina o nome do arquivo de programa que será gerado.
●Load Path as Points (Carregar trajetória como pontos) - Marque essa opção para converter uma curva em pontos, de modo que um projeto de seguimento de pontos seja criado no RoboDK. Isso é útil para operações de fabricação, como perfuração. Desmarque essa opção para carregar o caminho como um projeto de seguimento de curva.
●Alternate Curve Directions (Direções de curva alternadas) - Marque essa opção para alternar a direção do movimento a cada passagem (padrão Zig-Zag).
●Invert Normals (Inverter normais) - Marque essa opção para inverter as normais de superfície calculadas. Isso inverterá a orientação da ferramenta do robô.
●Use Inventor theme on RoboDK (Use o tema do Inventor no RoboDK) - Inicie o RoboDK com o tema do Inventor. Isso inclui a alteração do comportamento do mouse para navegação 3D e a cor do plano de fundo. Essas configurações podem ser alteradas no menu do RoboDK: Ferramentas - Opções.
●Communication Port (Porta de comunicação) - Defina a porta de comunicação para se comunicar com o RoboDK. Várias instâncias do RoboDK podem estar sendo executadas ao mesmo tempo e usar configurações diferentes se uma porta diferente for usada. Quando esse valor é definido como -1 (padrão), a porta padrão é usada (20500).
●Startup Options (Opções de Inicialização) - Defina os argumentos a serem passados para o RoboDK na primeira vez que ele for iniciado. Por exemplo, para iniciar o RoboDK silenciosamente, você pode definir '/NOSPLASH /NOSHOW /HIDDEN'. Os programas ainda podem ser gerados mesmo que o RoboDK não seja exibido. Para obter mais informações, consulte a seção Linha de Comando da API do RoboDK.
●Linear Tolerance (mm) - Define a precisão linear para dividir as curvas como um conjunto de pontos.
●Mix Normals Tolerance (mm) - Define a tolerância de distância usada para misturar cálculos normais entre várias superfícies.
●Export Format (Formato de exportação) - Selecione o formato de exportação para carregar a peça no RoboDK.
●Display all object curves (Exibir todas as curvas do objeto) - Exibe as curvas carregadas no RoboDK, mesmo que elas não estejam selecionadas. Você pode alterar essa configuração no RoboDK (Ferramentas – Opções – Exibir – Exibir Curvas).
Botões:
●Open RoboDK (Abrir RoboDK) - Abrir um projeto no RoboDK... Uma nova janela será aberta com opções adicionais.
●Load Project ... (Carregar Projeto...) - Carregue o projeto do RoboDK (arquivo RDK) que você deseja usar no projeto atual.
●Open Library (Abrir Biblioteca) - abrir Biblioteca on-linedo RoboDK.
●Set Defaults (Definir padrões) - Define as configurações padrão do componente.
●OK - Aplicar essas configurações e fechar essa janela. Se você não selecionar OK, as configurações alteradas não serão aplicadas.
Exemplos
Esta seção mostra exemplos básicos para gerar simulações e programas de robôs diretamente do Autodesk Inventor usando o RoboDK Add-In.
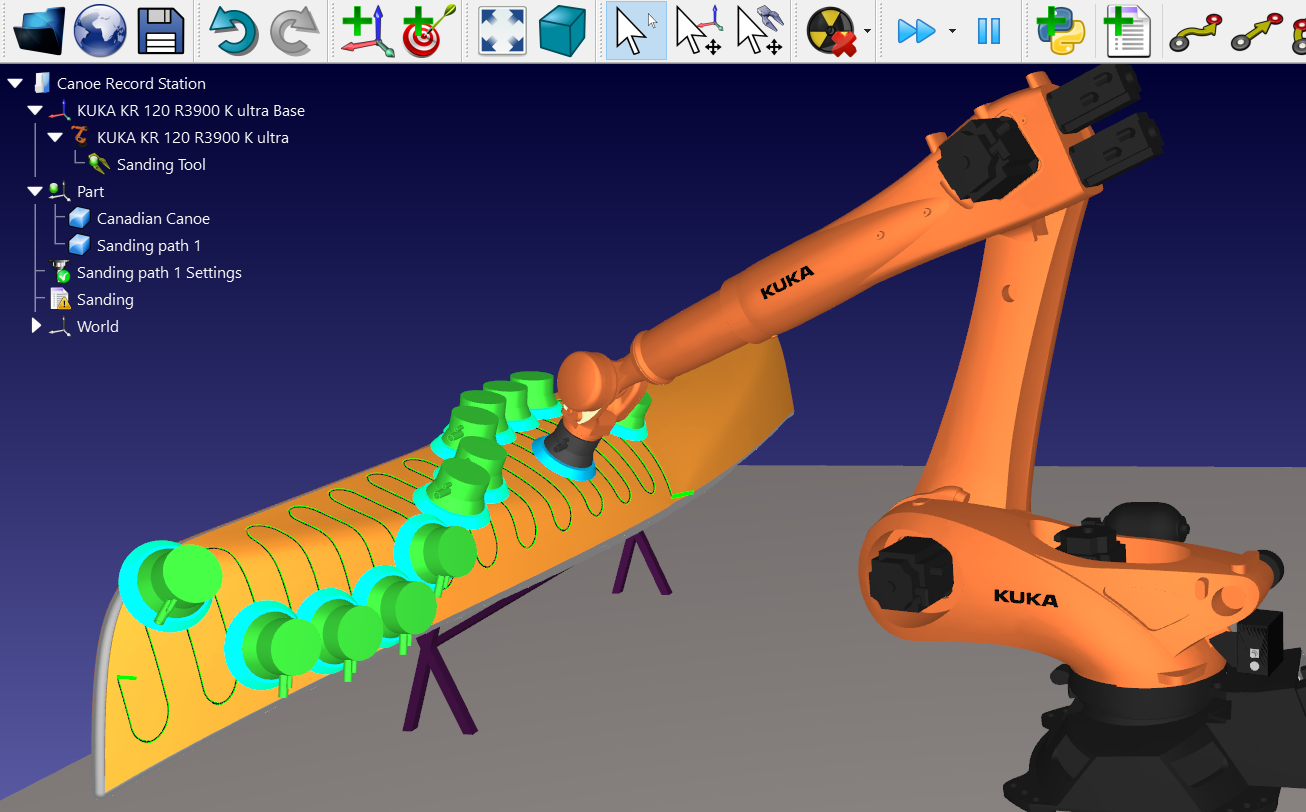
Polimento por robô
O vídeo tutorial a seguir mostra como você pode criar uma trajetória de ferramenta de 5 eixos para polir superfícies complexas.
Corte/moagem por robô
O vídeo tutorial a seguir mostra como você pode criar uma trajetória de ferramenta de 5 eixos para corte ou esmerilhamento.
Instalação manual
Estas são as etapas manuais para configurar o plug-in do RoboDK para o Inventor. Você deve seguir estas etapas se o plug-in do RoboDK para o Inventor não foi instalado automaticamente por padrão usando o instalador do RoboDK:
1.Instale o Autodesk Inventor (se você ainda não tiver feito isso).
2.Faça o download e instale o RoboDK.
3.Faça o download do plug-in do RoboDK para o Inventor.
4.Descompacte a pasta do plug-in do RoboDK para o Inventor em C:\RoboDK\Other\Plugin-Inventor\
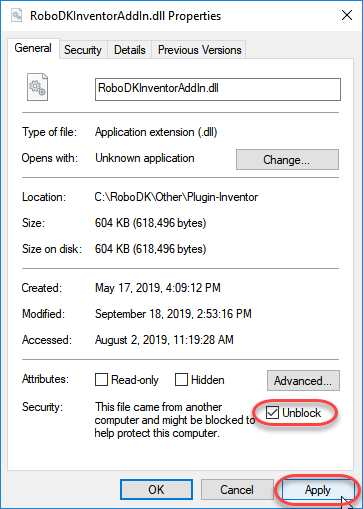
Desbloqueie o arquivo DLL (se aplicável):
5.Clique com o botão direito do mouse no arquivo RoboDKInventorAddIn.exe e selecione Propriedades.
6.Selecione Desbloquear e Aplicar.
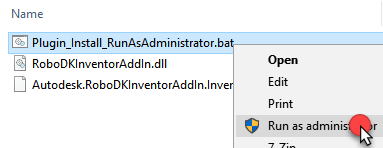
Instale o plug-in do RoboDK no Inventor:
7.Execute o arquivo Plugin_Install_RunAsAdministrator.bat como Administrador: Clique com o botão direito do mouse no arquivo BAT e selecione Executar como administrador.
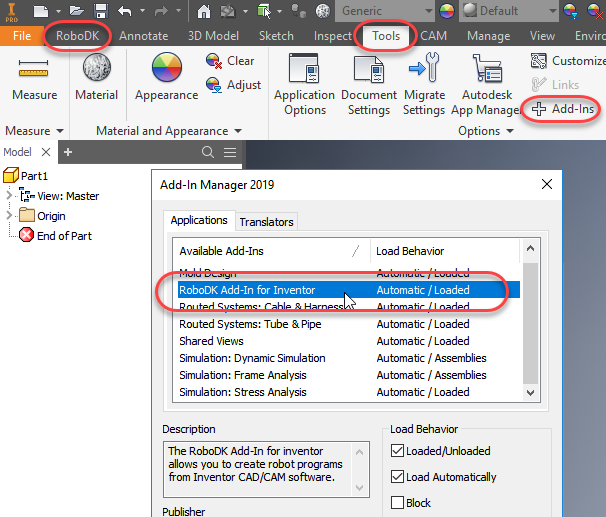
8.Inicie o Autodesk Inventor e vá para Tools➔ Add-Ins. Você deverá ver o RoboDK Add-In for Inventor.