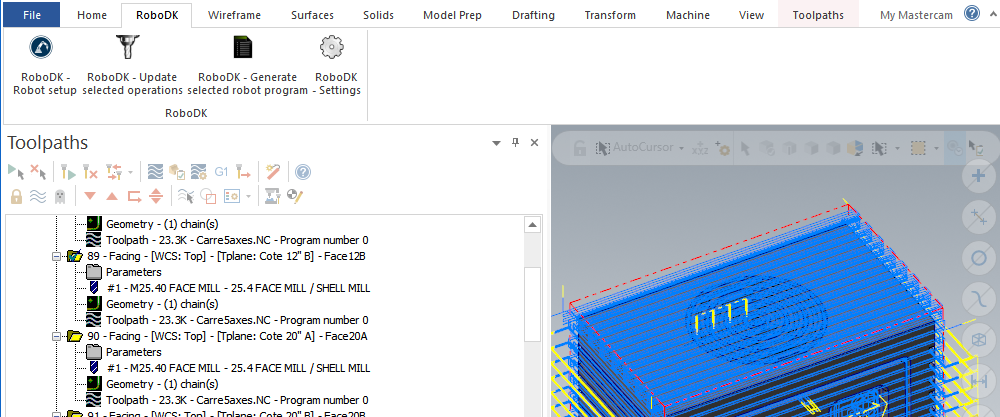
Add-in configurado
Se você instalou o RoboDK depois de instalar o Mastercam, deverá ter o plug-in do RoboDK para o Mastercam já instalado. Isso inclui a DLL na pasta CHOOKS, um pós-processador RoboDK.pst, definições de máquina fresadora e torno e algumas configurações de máquina padrão/genéricas.
Siga estas etapas para configurar o plug-in do RoboDK para o Mastercam:
1.Inicie o Mastercam.
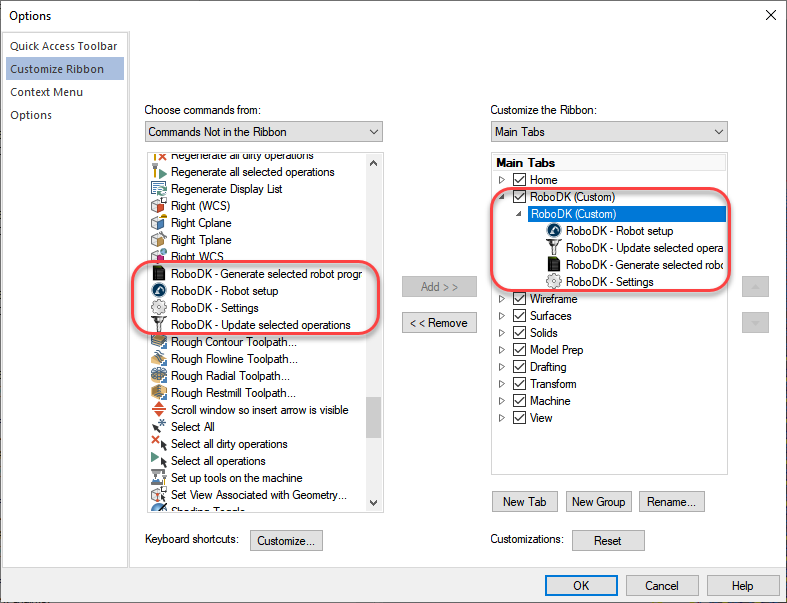
2.Configure os comandos do RoboDK:
a.Selecione File (Arquivo)➔ Options (Opções).
b.Selecione Customize Ribbon (Personalizar faixa de opções).
c.Selecione New Tab.
d.Selecione Rename (Renomear) e digite RoboDK.
e.Add-in os comandos selecionados, conforme mostrado na imagem.
f.Clique em OK para salvar a nova guia.
Em seguida, você verá a guia RoboDK no Mastercam, conforme mostrado na imagem a seguir.