Atualizar a(s) operação(ões) selecionada(s)
Selecione Update selected operations (Atualizar operações selecionadas) para gerar o caminho da ferramenta para as operações selecionadas e simulá-las no RoboDK.
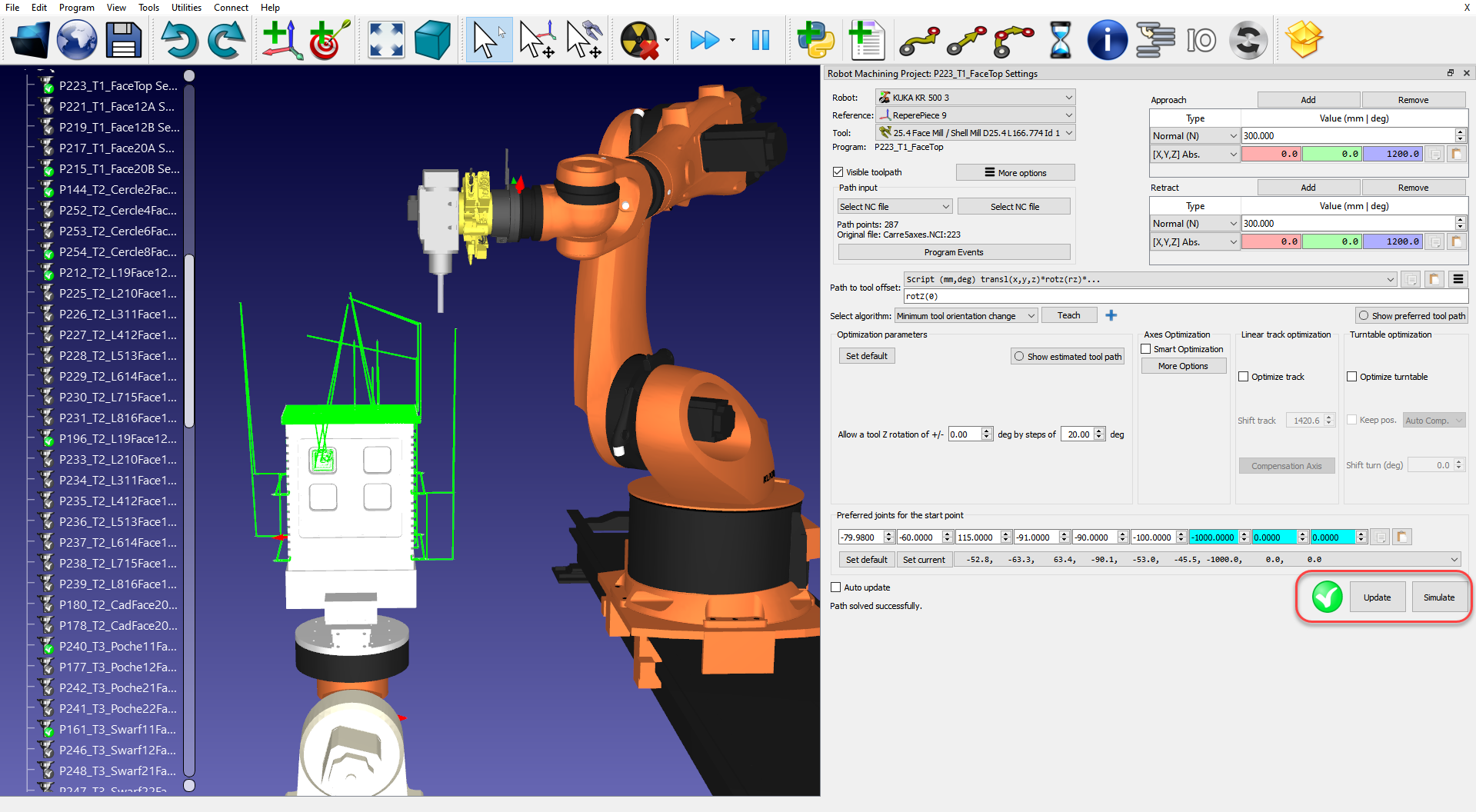
Essa ação carregará os percursos de ferramenta selecionados no RoboDK para a usinagem com robô. Por padrão, cada operação de usinagem será dividida como um programa de robô separado.
Uma marca de seleção verde será exibida se o programa for viável com o robô selecionado. Se houver algum problema (como singularidades, limites de eixo ou problemas de alcance), será exibida uma marca vermelha com uma mensagem sobre o problema.
Clique duas vezes no projeto de usinagem com robô
Clique com o botão direito do mouse em um programa e selecione Executar para simulá-lo (ou clique duas vezes no programa). Você também pode selecionar Gerar programa do robô (F6) para obter o programa do robô que precisa ser carregado no controlador do robô. Mais informações sobre como gerar programas de robô estão disponíveis na seção Programação off-line.
Se necessário, clique com o botão direito do mouse em um programa e selecione Selecione Pós-processador para alterar o pós-processador. Essa etapa pode ajudá-lo a personalizar a aparência do código gerado. Mais informações sobre como selecionar e personalizar pós-processadores estão disponíveis na seção de pós-processadores.
Por exemplo, quando você usa um robô KUKA, o RoboDK gera automaticamente o pós-processador para robôs KRC2 (chamado KUKA KRC2); no entanto, se você tiver um KRC4, poderá escolher o pós-processador KUKA KRC4.